基于无人机的测控天线试验鉴定方法 ①
2021-04-09吴宗清
门 涛,洪 宇,吴宗清,曾 媛,杨 光
(1.宇航动力学国家重点实验室,西安 710043;2.中国西安卫星测控中心,西安 710043;3.上海航天测控通信研究所,上海 201109)
0 引言
航天测控装备主要担负着各类航天器进出空间的测控任务和空间操控管理任务,随着航天技术发展及新型装备研制部署应用,航天装备试验鉴定对试验条件的要求也不断提高[1-2]。航天测控天线的准确标校是获得高精度测量数据的基础,也是实验鉴定工作的重要组成部分。在航天任务中,按设备场区有无配置标校塔,可分为两类标校方法:有塔标校和无塔标校。有塔标校是指利用经过精确大地测量的标校塔进行标校,通过在标校塔上架设标校设备,测控设备天线对准塔上标校设备的方式进行标校。这种方式可操作性强,普遍用于航天测控设备。受制于工程基建建设,有塔标校即使能够满足远场条件,但一般仰角较低,容易受到周边环境的干扰,造成标校误差。无塔标校是指不利用标校塔即可完成设备标校的各类方法,如采用在天线副面架设标校设备、放标定球、指向或卫星等方式实现无塔标校。这些方法存在很大局限性,可推广性不强,迫切需要研究新的无塔标校方法[3-6]。
随着无人机技术的发展,无人机利用搭载小型化测控、通信、雷达、光电等模拟设备和小型化RTK设备,构造外部标校环境,配合地面测控设备进行标校及性能鉴定[7-9]。采用该方法对测控天线进行性能鉴定,测控设备与标校设备之间的空间距离可灵活构设,测控设备天线仰角较有塔标校角度更高,能够取得较为优良的标校条件,不易受到周边地形影响,能够取得理想的标校结果。
本文提出了基于无人机平台的测控天线试验鉴定方法,设计了试验鉴定评估系统,并对定位精度进行了分析,验证了无人机平台在测控天线试验鉴定和标校测试中的可行性。
1 地基装备试验鉴定评估系统组成
试验鉴定评估系统在装备试验与定型中具有重要作用。现阶段,航天测控领域对测控装备的试验鉴定能力比较薄弱、新技术应用综合评估能力不足,因此需要开展地基测控装备试验鉴定评估系统建设。试验鉴定评估系统作为考核、演练和评估手段,通过对装备研制过程中各类试验数据进行收集、分析和整理,在接近实战条件下对新研的测运控装备进行试验,检验装备的各种性能指标,以促进装备定型。
试验鉴定评估系统由试验鉴定与指控中心、机动鉴定单元、试验鉴定数据处理中心、无人机平台、北斗精度鉴定系统、各类配套保障设备等,系统组成如图1所示。
机动鉴定单元采用单车机动运输方式,无人机、地面各分系统及配套保障设备装载于方舱,机动鉴定单元按照“单架无人直升机+2架多旋翼无人机”的配置模式,工作时应答机、干扰机等有效载荷根据任务需加载到无人直升机或多旋翼无人机。
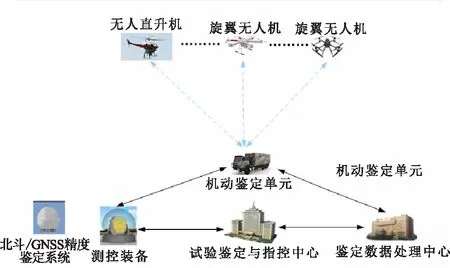
图1 试验鉴定评估系统组成图
试验鉴定数据处理中心利用精度鉴定系统数据处理软件,计算设备测量精度,具体工作包括数据转换和质量评估、核心产品生成、数据质量分析、数据存储管理、数据发布,对天地基装备提供鉴定评估服务。
北斗精度鉴定系统由数据处理中心、基准站和动态点组成[10-11]。数据处理中心完成测控设备精度鉴定工作的组织和调度,负责鉴定数据的收集,并利用北斗导航数据完成对待鉴定设备的数据处理和分析,给出鉴定结论;位于全国各地的基准站组成基准网,经网整体平差处理,精确测定各基准点的三维坐标;动态点装置于无人机上,配置北斗/GNSS接收机。
2 基于无人机平台的试验鉴定系统组成
无人机载试验系统包括无人机平台分系统、载荷分系统、地面飞行控制分系统、地面数据处理中心分系统、监控分系统、测试平台分系统、载车方舱分系统、各类配套保障设备等。系统组成框图如图2所示。

图2 无人机载试验鉴定系统组成图
工作时,有效载荷根据任务需要灵活加载到无人直升机或多旋翼无人机。撤收时,无人机、地面各相关分系统及配套保障设备装载于方舱,采用单车机动运输。无人直升机和多旋翼无人机数据链路各自独立控制。根据选用的平台不同,可构成无人直升机载试验系统、多旋翼无人机载试验系统等。
地面数据处理中心分系统包括两套差分GPS/北斗地面基准站、数据记录设备和数据处理软件。标校时,对标校数据进行处理,给出标定结果。校飞时,通过差分北斗/GNSS接收机实时测量无人机平台精确位置,并将载荷信息通过数据链路实时传到地面。地面数据处理中心分系统对待鉴定设备校飞数据进行处理,给出雷达、光学、微波统一系统装备的鉴定结果。
由于场区内存在多个频段的测控设备[12-13],且校飞等试验需要无人机能够提供30分钟以上的定点悬停时间,为高效开展测控天线试验鉴定工作,本项目主用载重量大、续航时间长的无人直升机。并根据试验场景需求,设计优化了测控载荷组合模式,包括S频段应答机、C/X/Ka频段应答机、C频段脉冲应答机、1台北斗接收终端设备等部分组成。无人机执行组合状态工作模式时,设备通过安装件集中安装到前任务舱和中任务舱,天线通过支架吊装在无人直升机下方,总体布局如图3所示。

图3 无人机组合状态工作模式搭载示意图
3 差分北斗接收机相对定位精度分析
试验鉴定系统由直升机搭载北斗接收设备,如图4所示,和地面北斗基准站配合获得高精度的无人机位置信息,即比较标准系统[14]。同时对该比较标准的测量数据,应用数学方法和数据处理技术得到高精度的比较标准,地面测控天线和飞机搭载的各载荷设备配合获得无人机位置信息,即被鉴定系统。将被鉴定系统和比较标准系统,对测量目标的同一采样时刻直接测量数据作差得到差分序列,经处理统计分析,得到被鉴定系统的误差统计量和测量精度。
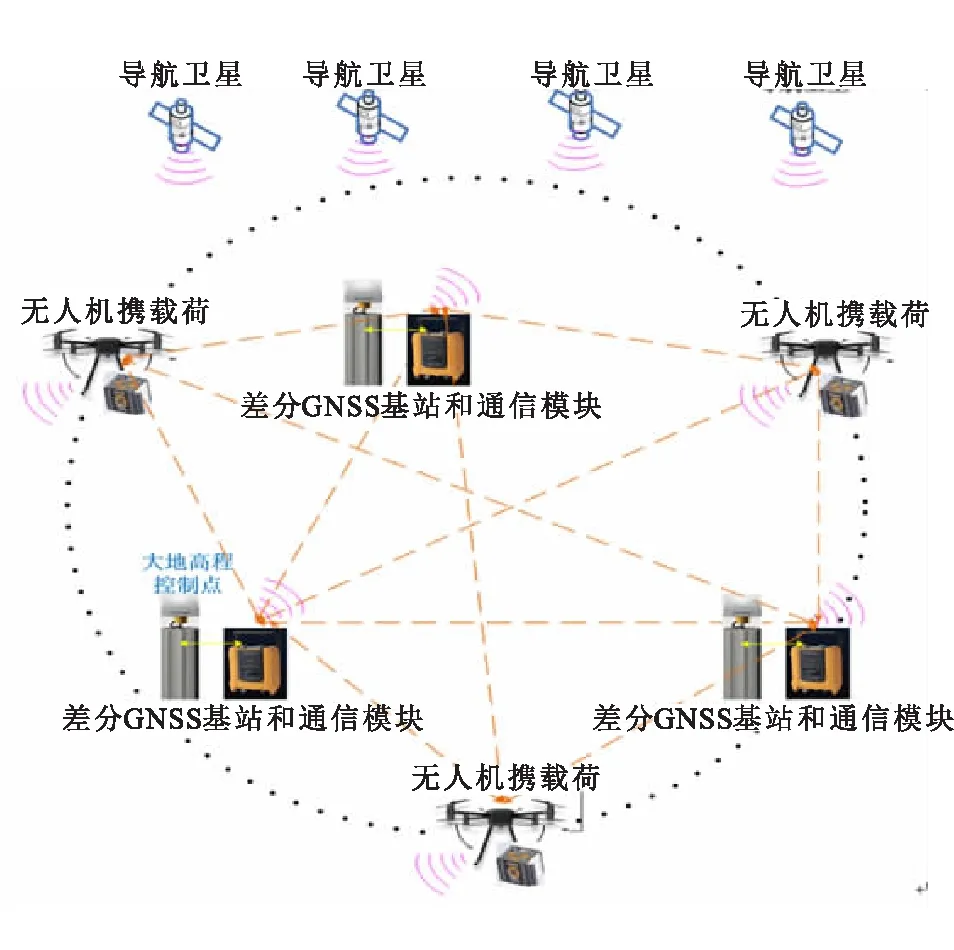
图4 基于北斗导航的多基线测量精度鉴定方法
理想情况下标准比对与被鉴定系统测量精度两者均方差之比σ标准比对/σ被检定标准≤1/10。但在工程实践中,特别是鉴定高精度连续波测量系统精度时,该指标难以实现。因此,试验场在评定外测系统测量精度时,一般要求≤1/3。
3.1 距离精度
距离精度由RTK定位平面精度和高程精度、差分基站位置平面精度和高程精度、测控天线坐标系转换误差值构成。距离精度按下式计算:
(1)
式中σrange为测控天线坐标原点到无人机之间距离精度,σ1、σ2、σ3、σ4、σ5分别为RTK平面精度取±25mm(10-20km基线)、±15mm(5-10km基线)、±10mm(1-5km基线),RTK高程精度取±50mm(10-20km基线)、±30mm(5-10km基线)、±20mm(1-5km基线),差分基站平面精度取±2.5mm,差分基站高程精度取±5mm,天线坐标系转换到84坐标系误差取±4mm。计算可得无人机到测控天线坐标原点的距离精度为±56mm(10km基线)、±35mm(5km基线)、±24mm(1km基线精度)。
按被鉴定标准与标准比对取1/3即σ标准比对/σ被鉴定标准≤1/3,可满足测控天线测距精度大于±0.17m的要求。
3.2 角度精度
角度精度由RTK定位平面精度和高程精度、差分基站位置平面精度和高程精度、测控天线坐标系转换误差、无人机到测控天线坐标原点基线长度值构成。角度精度可按下式计算:
(2)
式中L为无人机到测控天线坐标原点基线。计算可得角度精度分别为±11.56″、±2.3″、±1.16″。
对于测控天线波束宽度(3dB)为0.1°情况,单脉冲测角体制测角精度按1/10波束宽度计算,测控站测角精度为±0.01°,再按被鉴定标准与标准比对取1/3,需要作为标准比对的角度测量精度小于±12″,当无人机到测控天线坐标原点基线长度为1km时角度精度为±11.56″,就可满足测角精度鉴定要求,更长的基线则角度精度更高。
3.3 速度精度
速度精度由北斗授时精度、RTK定位平面精度和高程精度、测控天线坐标系转换误差构成。速度精度按下式计算:
(3)
式中σvelocity为测控天线坐标原点到无人机之间速度精度,σt、σ1、σ2、σ3分别为授时精度±20ns,RTK平面精度取±10mm+1ppm,RTK高程精度取±20mm+1ppm,天线坐标系转换到84坐标系误差取±4mm。计算可得速度精度±24mm/s,与无人直升机25-35m/s运动情况下,机上RTK速度精度±0.03m/s比较接近,可满足测控天线测速精度要求。
3.4 误差分析
采用无人机搭载测控载荷进行天线标校的方法也将引入新的误差,主要是飞行姿态变化和机载载荷天线与北斗差分天线位置不一致引起的误差。北斗差分天线布设在无人机顶端,而测控载荷天线设置正下方的机腹位置、飞机惯导配置在飞机质心,设计阶段对差分天线与载荷天线、质心处惯导位置误差进行了精确测量,在数据处理过程中扣除该距离引起的误差,但最终还会因为飞机姿态及抖动引起厘米级的误差。为减少无人机姿态变化引起的误差,本项目为测控载荷设计了全向收发天线,同时地面设备在无人机爬升、转弯等状态下不跟踪载荷,仅在无人机平飞或悬停状态下进行试验,尽量减小无人机姿态变化引入的误差。此外,受天气影响(风、雪等),无人机姿态变化较大,影响标校天线位置稳定性,接收信号电平幅度不稳定,进而影响标校结果。
尽管无人机搭载载荷的标校方法引入新的误差,但无人机平台作为可移动的“标校塔”,可以灵活地构造外部标校环境,不受地理条件限制,在新型航天测控装备的标校测试中存在工程应用前景。无人机测试方法、标校塔、卫星标校等三种标校方案的优缺点如表1所示。
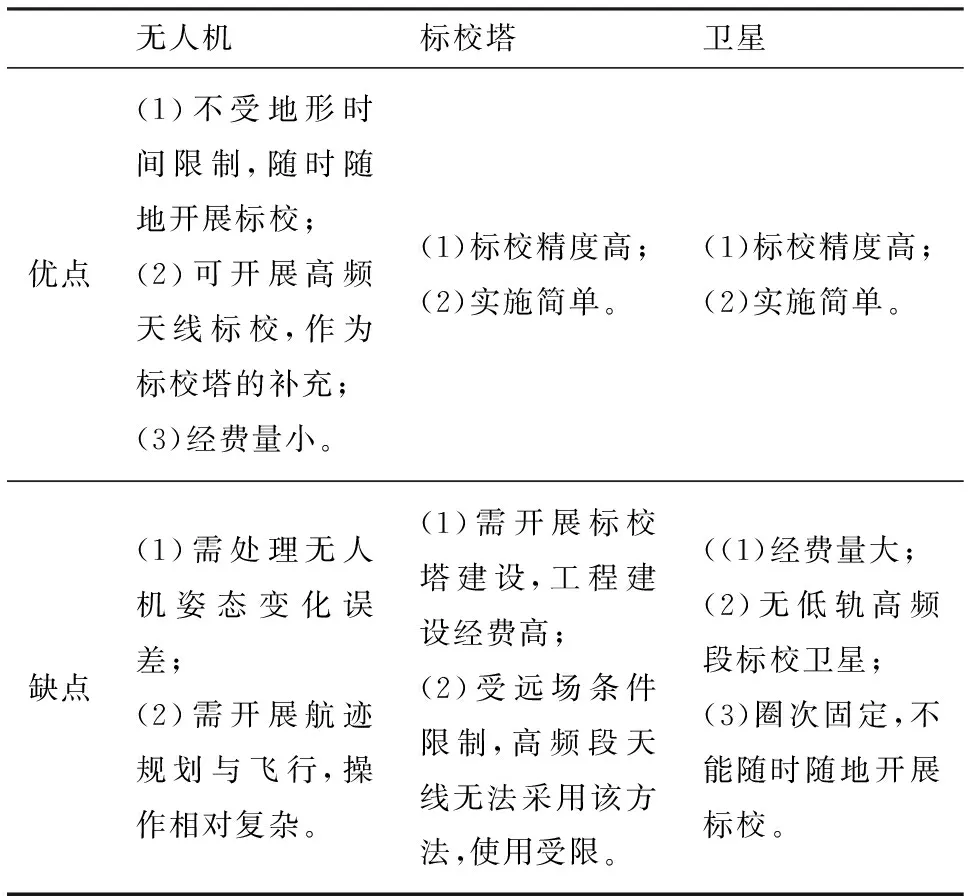
表1 天线标校方法优缺点对比
4 数据处理流程
精度鉴定数据处理流程是以北斗差分接收机定位结果为标准,通过与测量设备测量结果的比对、统计检验,鉴定测量设备的性能和精度,分离并确定其系统误差和随机误差,研究并掌握其误差变化规律,如图5所示。具体工作步骤如下:
l)差分北斗接收机相对定位精度评定。
2)数据时间对齐。将差分北斗接收机定位时间与测量设备测量时间对齐,并采用统一的时间系统。
3)坐标转换。将差分北斗接收机采用WGS-84坐标系测量计算结果,转换为测控设备装订的大地坐标系测量数据。
4)差分北斗接收机结果与测量设备结果比对、作差,求出各观测时刻的差值,剔除粗差。
5)计算测量设备的总误差。
6)计算测量设备的系统误差和随机误差,确定测量设备误差变化的规律。
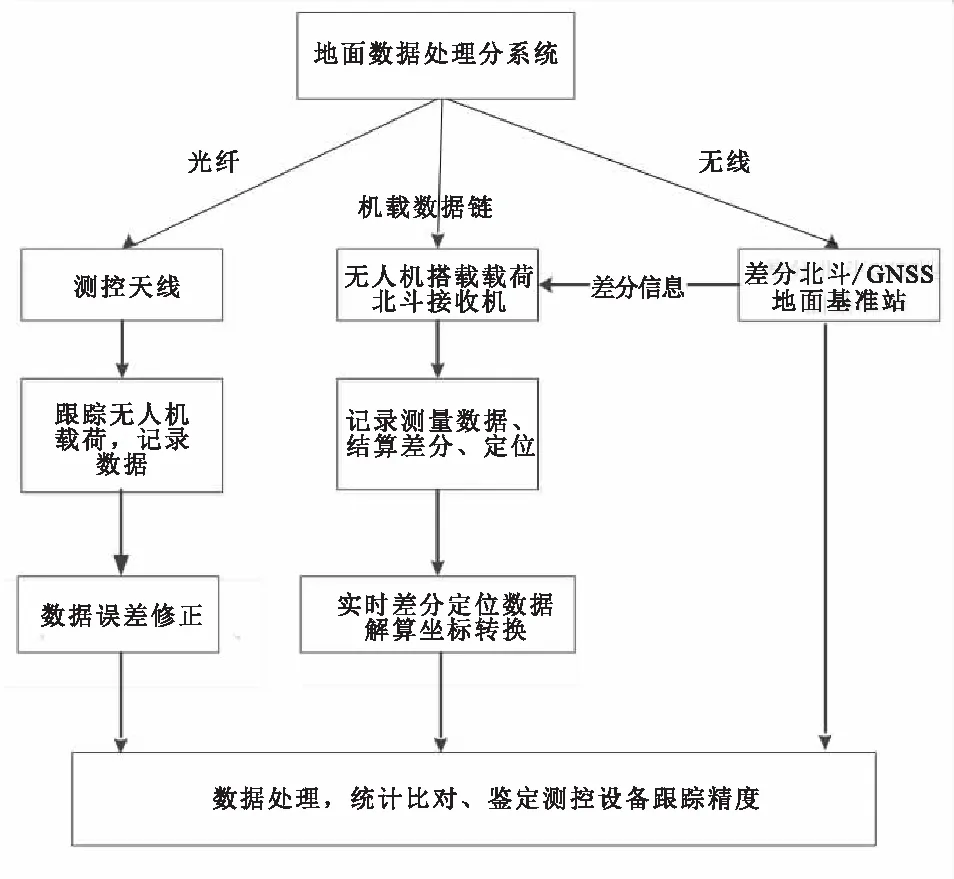
图5 数据处理流程图
5 结论
本文探讨了基于无人机平台的测控设备试验鉴定系统的组成,工作模式及鉴定方法,并分析了试验精度。该方法为航天测控天线试验鉴定的实现提供了新思路,无人机平台作为可移动的标校塔及鉴定平台,可以灵活地构造外部试验环境,不受地理条件限制。因此,它在大口径航天测控天线的试验鉴定邻域具有应用前景。
