基于石英挠性加速度计微重力测量仪在空间站的应用 ①
2021-04-09李增科李云鹏雷军刚席东学杨金禄孙永进陈金强
李增科 ,李云鹏*,雷军刚,席东学,杨金禄,孙永进,陈金强
(1.兰州空间技术物理研究所空间载荷工程中心 ,兰州 730000; 2.中国空间技术研究院载人总体部,北京 100094; 3.中科院空间工程与应用中心,北京 100094)
0 引言
空间站微重力环境作为探索空间领域宝贵资源,对生物技术、材料科学、基础物理研究等空间科学实验提供重要的测试平台。对于微重力加速计评估和测量是试验环境方面的参考依据[1]。空间微重力测量仪作为空间站试验舱内微重力水平和测量设备主要由在轨测量控制设备与地面数据处理软件两部分构成。测量控制设备主要功能实现石英挠性加速度计传感器检测与电流-电压信号转化、滤波,三坐标信号的数据同步采集、处理和通讯功能;地面数据处理软件完成对数据的解析、依据标定参数对数据进行处理,分析满足测量要求下所表征的实际加速度度值的物理含义。
1 原理及测量仪组成结构
石英挠性加速度计是基于摆式加速度计理论的基础上研制的新型加速度计。应用在惯性导航和惯性制导系统等领域主要选择类型。其具有灵敏度高,动态响应快宽频,噪声低等特点,对于静态或动态加速度测量方面适用性显著。
微重力测量仪通过加速度计输出电流检测该空间所处的微重力加速度[2]。石英挠性加速度计原理图见图1,空间实验室微重力测量仪系统构成见图2。
微重力测量仪主要由检测与滤波电路、多通道同步模数变换电路、总线接口及控制。主控信号/通讯处理器、FPGA电路及外部总线接口电路构成见图2所示。且图中虚框简称数据传输单元。
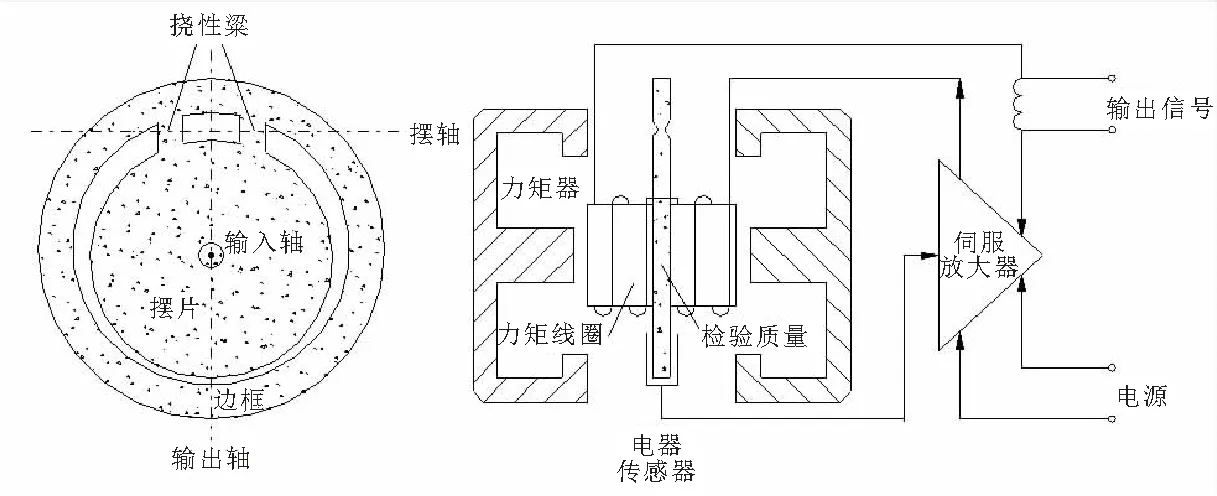
图1 石英挠性加速度计原理图

图2 空间实验室微重力测量仪系统构成图
测量原理:通过传感器获得四路/三坐标加速度电流信号[3],通过检测与滤波处理、模数转化后再经过主控信号处理后,内部数据通过两DSP之间的SPI通讯协议进行数据交换,FPGA的指令控制经接口电路与外部总线进行通讯。
2 测量仪系统系统设计
2.1 检测调理电路设计
加速度输出信号,通过以OP07运算放大器为核心器件构成检测调理电路设计,完成I-V电路转换。前端输入限流、差分限幅保护、输出电压与反馈电阻的匹配性设计等[4]。电路原理见图3所示。
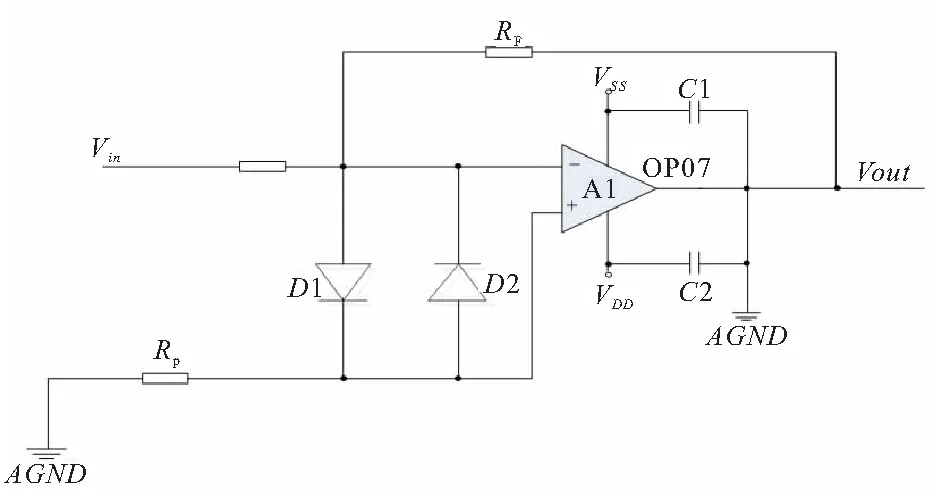
图3 信号检测与调理电路
在实际电路设计中根据电压输出的要求可选择不同的反馈电阻RF值。
2.2 滤波器设计
模拟滤波器满足设计所需的幅频特性同时,避免信号受到外界干扰的影响因素,增加抗混叠设计;同时从工程应用考虑,对整机测量动态范围、被滤除高频信号幅度大小和加速度计对高频信号衰减等因素综合。满足动态范围大于72dB要求可达到实际需求。模拟滤波器采用3阶巴特沃兹低通滤波器,截止频率约为500Hz,原理及参数设置如图4所示,其频谱响应如图5所示。

图4 三阶Butterworth低通滤波器电路原理图

图5 三阶Butterworth低通滤波器幅频特性
经实验验证可得:模拟滤波器通带内衰减幅度为18dB/oct,过采样速率设定为2kHz(4倍过采样),则镜频频率为1kHz,对应300Hz处镜频频率为1.7kHz处衰减幅度为-32dB,因此3阶低通滤波器噪声为-32dB。
2.3 电平转换及模数转换时序电路
由于模数转换器AD976数字接口电平为5V,而DSP SMJ320VC33接口电平为3.3V,因此需要在AD976和SMJ320VC33之间加电平转换器件。在实际应用中采用UT54ACS164245器件完成电平转换功能。且与DSP连接之间某些引脚增加接口电路,其目的是提高电路适应性,增加系统应用的可靠性和安全性。
空间实验室微重力测量仪实现4路微重力信号的同步采集。采用AD976完成模数转换和同步采集功能。AD976转换时序、逻辑图6如所示。
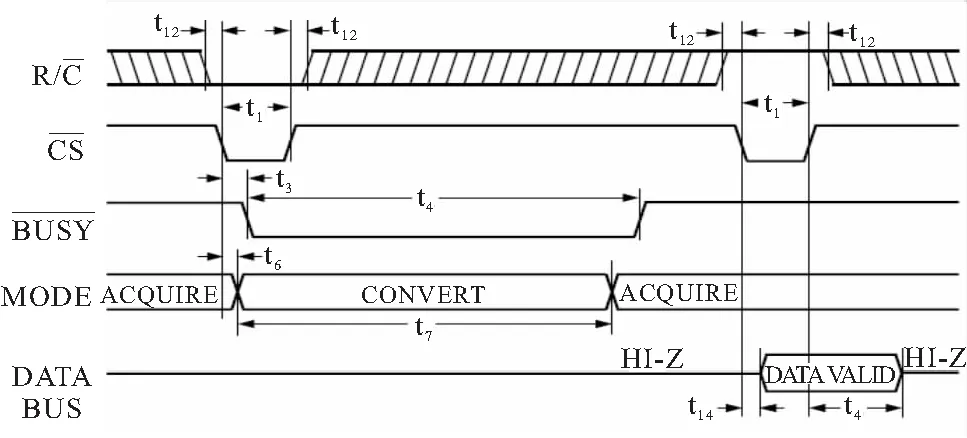
图6 AD976控制转换时序图

2.4 通讯总线
空间微重力测量仪设备通讯有两种方式:内部双DSP与FPGA之间采用SPI通信,完成数据的之间传输、执行双向任务功能等;另一种采用1394总线协议通讯方式与外接口联系。
微重力测量仪的数字信号处理器模块与数据传输单元间采用4线制SPI协议进行通讯,考虑到及时接收1394总线指令的需要,数据传输单元设置为主节点,数字信号处理器模块设置为从节点。数字信号处理器模块选用的SMJ320VC33型DSP具有1个全双工串行口,因SPI通讯接口采用DSP串口直接实现,无需设计专门的接口电路。为了提高数据传输的可靠性,数字信号处理器模块与数据传输单元间的信号传输采用RS422电平,采用总线驱动器和总线接收器实现内部通讯。
数据传输单元主要功能是422电平信号与外界1394总线之间转换的通讯电路板。数据传输单元组成结构见图7所示。单元组成主要包括SRAM电路、复位电路、FPGA电路、逻辑接口电路和1394总线接口电路等(见图1所示)。FPGA芯片主要完成数据封装、转发及部分控制功能,DSP芯片SMJ320F2812负责数据传输单元的运控管理和1394链路管理。FPGA主要负责接口时序调整,将外部总线接口时序调整为符合DSP外部接口的时序。DSP通过FPGA提供的接口对1394芯片进行寄存器配置和数据收发[5,6]。
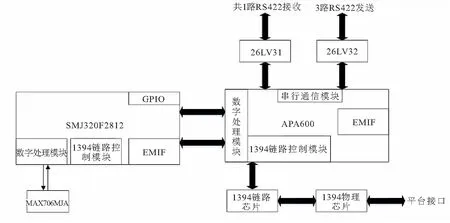
图7 数据传输单元组成结构
2.5 软件设计思路
该系统测量仪软件主要由主数据采集和处理(总线信号处理器)、测量仪数据传输单元主控软件和数据传输接口处理逻辑软件(FPGA)。分别用于数据采集、通讯控制以及1394通讯模块逻辑接口电路和SPI通讯接口电路的实现。
完成主要功能包括如下:
1)数据采集软件:初始化功能、数据采集功能、数字滤波功能、统计、校时和模式切换、数据输出功能等;
2)数据传输单元主控软件:数据传输单元接口处理逻辑与平台系统、数据传输单元接口处理逻辑与微重力测量仪的数据通信进行控制和管理,实现对平台指令的处理、时间码的管理以及SPI指令的处理等;
3)数据传输接口处理逻辑软件(FPGA):建立子系统与平台系统之间的桥梁,平台系统外部通信接口、SPI内部通讯接口以及与数据传输单元主控软件配置项的XINTF接口,1394链路芯片接口时序转换[7-9]。软件系统构成如图8所示。
4)为实现软件的实际利用率,对软件架构进行优化的同时,在算法上通过不同专用软件进行分析比对,避免循环体内函数的多次跳转、预分配内存和指令优化等同时通过仿真软件与自行研制开发地检软件进行静态或动态运行状态进行监测分析,通过多轮用例测试及计算,将处理器余裕量比常规设计和测试提高到20%以上。提高了软件运行环境的可靠性。
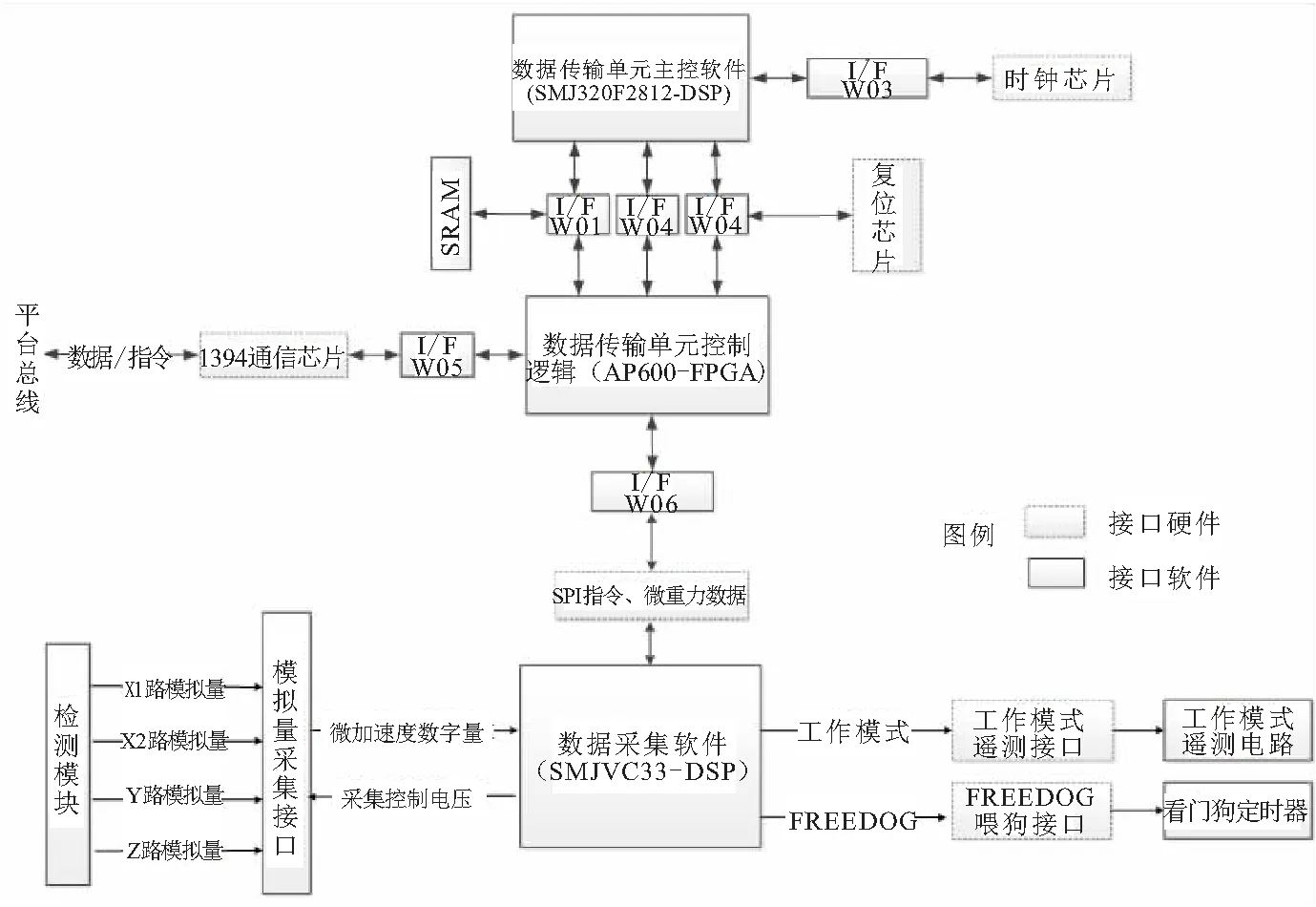
图8 微重力测量软件系统构成图
3 测量数据及分析结果
空间实验室(空间站)中自发射后运行在距地面约300Km近地轨道。在距载人飞船与其对接前对其微重力环境进行测量(时间为2016年10月15日)且正开液桥展热毛细对流实验阶段。
(1)地面测试情况
空间实验室(空间站)地面稳定工况下微重力水平见表1所示。

表1 空间实验室(空间站)地面稳定工况下微重力水平
图9为地面测试期间测量数据结果图形。左图(a)为大量程时数据测量结果,右图(b)为小量程数据测量结果。

(a) 大量程数据测量结果 (b) 小量程数据测量结果
(2)在轨测试数据及分析结果
图10为在轨测试期间测量数据结果图形。左图(a)为大量程数据测量结果,右图(b)为小量程数据测量结果。
对某飞船与空间站对接前相对稳定工况下微重力数据进行解算,得到各轴微重力测量值,如表2所示:
在轨数据测量曲线图见图10所示。
分析结果表明:X1通道地面测量与在轨测量数据比较:平均值偏差绝对值:0.034 mg0, X2通道地面测量与在轨测量数据比较均值偏差绝对值:0.11 mg0;不确定性均不超过0.2;标差值相对误差0.027mg0数量级。除Y轴在地面处于饱和状态外,其余三轴的标准差结果一致性良好。该数据测量来源于2016年10月15日在轨测量数据。
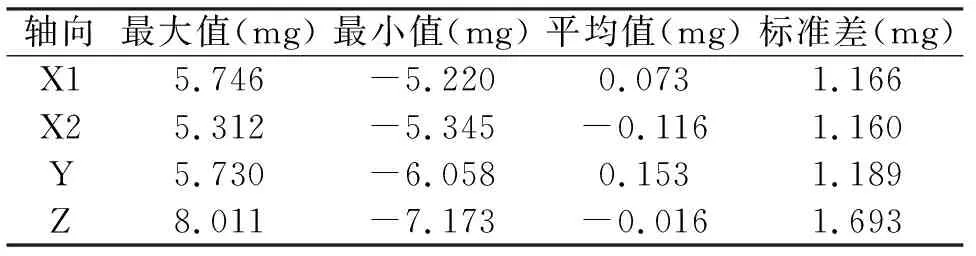
表2 空间实验室(空间站)在轨稳定工况下微重力水平
(a) 大量程数据测量结果0 (b) 小量程数据测量结果
4 结论
对于微重力测量仪设备以石英挠性加速度计为传感器测量微弱信号测量系统。成功实现了工程应用价值和科学数据分析和评估的研究意义。工程参数反映了测量的技术水平。对于小量程(-10~+10)mg0范围时,分辨率≤5.4ug0测量水平;大量程(-150~+150)mg0范围时,分辨率≤75ug0,且频率带宽在0.09~300Hz带宽内可精确微重力水平检测。不确定性小于0.2,外部接口通信传输速率可达100Mbps。将原有传输速度由0.3Mb/s提高到目前100Mb/s实时数据传输,大幅度解决了采集系统采样速度快,对外部接口数据传输慢的技术难题,且同时对软件进行优化设计,增加处理器余裕量比常规软件运行占用量提高20%,满足航天产品的高可靠性特点。且具有测量精确高。动态响应快,数据处理能力强测量ug0级精密测量仪器设备。对微小信号测量系统领域中提供了借鉴意义。对其他测量技术的研发提供了新思路。既提升拓展了我国航天领域中空间微重力测量能力和应用。又为未来深空探测能力进一步提高提供有力的支撑。
