镜像运动康复机器人对卒中亚急性期手运动功能障碍的康复效果研究
2021-04-08王传凯刘兰兰刘向云项育枝陈瑶贾杰
王传凯,刘兰兰,刘向云,项育枝,陈瑶,贾杰
卒中是全球范围内导致人类功能障碍的主要疾病之一,卒中后手功能障碍是阻碍患者回归家庭、重返社会的主要影响因素[1]。卒中后高达85%的患者会伴有单侧上肢手运动功能障碍,但其中只有不足50%患者能在发病6个月后恢复上肢手运动功能[2-3],卒中后手功能障碍严重影响患者的日常生活质量,同时为社会及患者家庭带来巨大压力与沉重负担,因此卒中后手功能康复的开展意义重大。
近年来,随着科学技术的发展,手功能康复机器人逐渐成为辅助康复医学发展、促进卒中后手功能神经康复的智能科技手段之一,在临床中已得到广泛应用[4-5]。在“产-学-研-医”模式下,针对患者康复训练的不同需求,各种符合现代康复理念的手功能康复机器人得到研发[6],其中包括一种具备镜像运动模式的康复机器人,但其对手功能康复的治疗效果仍缺乏临床证据支持。因此,本研究探讨该康复机器人对卒中亚急性期手运动功能障碍患者的康复效果。
1 对象与方法
1.1 研究对象 前瞻性选取2020年6-8月于上海第三康复医院连续收治的卒中亚急性期患者为研究对象。采用信封法将患者随机分为观察组和对照组,两组均予常规康复治疗,观察组在此基础上予康复机器人手套治疗。本研究经上海市静安区中心医院伦理委员会批准(批准文号:2020伦审第01号),所有患者均签署知情同意书。纳入标准:①首次发病为单侧卒中,影像学诊断为皮层下损伤;②病情稳定,无严重并发症;③年龄50~80岁,病程为发病后7 d至6个月[7];④发病后采用保守治疗,未接受开颅等外科治疗;⑤存在手运动功能障碍。排除标准:①头颅外伤、TIA、蛛网膜下腔出血,既往有癫痫病史者;②头颅有金属或心脏起搏器植入;③认知功能障碍,不能配合研究者;④严重心、肺、肝、肾等重要脏器功能衰竭者;⑤妊娠期患者;⑥手伸指肌群、屈指肌群改良的Ashworth量表分肌张力>1+级。
1.2 治疗方法 对照组患者接受卒中临床常规药物治疗,同时接受康复肢体综合训练,包括良肢位摆放、运动疗法、作业治疗、物理因子疗法以及传统康复治疗等。
观察组在对照组基础上予康复机器人手套治疗(上海司羿智能科技有限公司,HR-08)(图1)。具体治疗方法如下:患者取坐位,保持放松;选取“镜像治疗”模式,健侧手佩戴传感手套,患侧手佩戴气体驱动软体手套,康复机器人屏幕会实时反映患者手部的运动,患者注视屏幕进行“握拳-放松”训练,患侧手将与健侧手同步进行镜像运动,治疗参数为每次30 min,1次/日,5次/周,连续治疗4周,共治疗20次(图2)。

图1 镜像康复机器人
1.3 评估方法 所有患者在治疗前后各接受一次康复评估,评估者为接受康复评估规范化培训的康复治疗师。患者在治疗前评估一次基本信息,评估内容包括性别、年龄、卒中类型、病程与Bruunstrom手部分级。Bruunstrom手部分级分为1~6级,1级为手完全不能运动,6级为正常运动功能水平,等级越高说明患者手运动功能基础水平越好。
研究治疗效果评估方法具体如下,①Fugl-Meyer上肢运动功能评定(Fugl-Meyer assessment upper extremity,FMA-UE):包括33个评分项目,总分66分,评分越高表明患者上肢运动功能越好;②FMA-UE手部评分:为FMA-UE的一部分,分为7个评估项目,总分14分,评分越高表明患者上肢与手运动功能越佳;③箱盒测试(box and block test,BBT):一种手灵巧度评估方法,在60 s内将2.5 cm3的积木从带隔板的箱子一侧移到另一侧,移动数量越多表示手的灵巧度越佳;④上肢动作研究测试(action research arm test,ARAT):由19个功能项目组成,分为抓握、捏、握力和粗大运动功能测试,总分57分,评分越高表明手运动功能越佳;⑤改良Barthel指数(modified Barthel index,MBI):评估患者的日常生活活动能力,总分100分,评分越高表明日常生活活动能力越强;⑥手握力与捏力:握力反映患侧手握拳的肌力水平,捏力反映拇指与食指侧捏的肌力水平,值越高表明患者相关肌肉的肌力越大。
1.4 统计学方法 应用SPSS 25.0软件进行统计学分析。计数资料以率(%)表示,采用χ2检验。计量资料符合正态分布的数据以表示,组内比较使用治疗前后评分均数,采用配对t检验,组间比较采用治疗前后评分差值,采用独立样本t检验。不符合正态分布的数据采用M(P25~P75)表示,组间与组内数据分析均采用秩和检验。以P<0.05为差异有统计学意义。
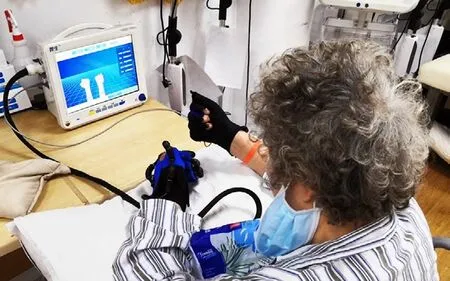
图2 患者使用镜像康复机器人进行手功能训练
2 结果
本研究最终纳入40 例患者,两组各20例。两组性别、年龄、卒中类型、病程与Bruunstrom手部分级比较,差异无统计学意义(表1)。
治疗前和治疗后两组间各项指标评估结果比较,差异均无统计学意义。治疗后组内比较结果显示,对照组仅MBI评分高于治疗前(P=0.049),FMA-UE、FMA-UE手部评分、BBT指标、ARAT评分、握力及捏力与治疗前比较差异均无统计学意义;观察组FMA-UE评分(P=0.024)与FMA-UE手部评分(P=0.046)均高于治疗前,而MBI评分、BBT指标、ARAT评分、握力及捏力与治疗前比较差异无统计学意义(表2)。
对两组治疗前后进步程度(各指标结果差值)进行统计分析发现,观察组FMA-UE与FMA-UE手部评分差值均高于对照组,差异有统计学意义,其余指标差值比较均无统计学意义(表3)。
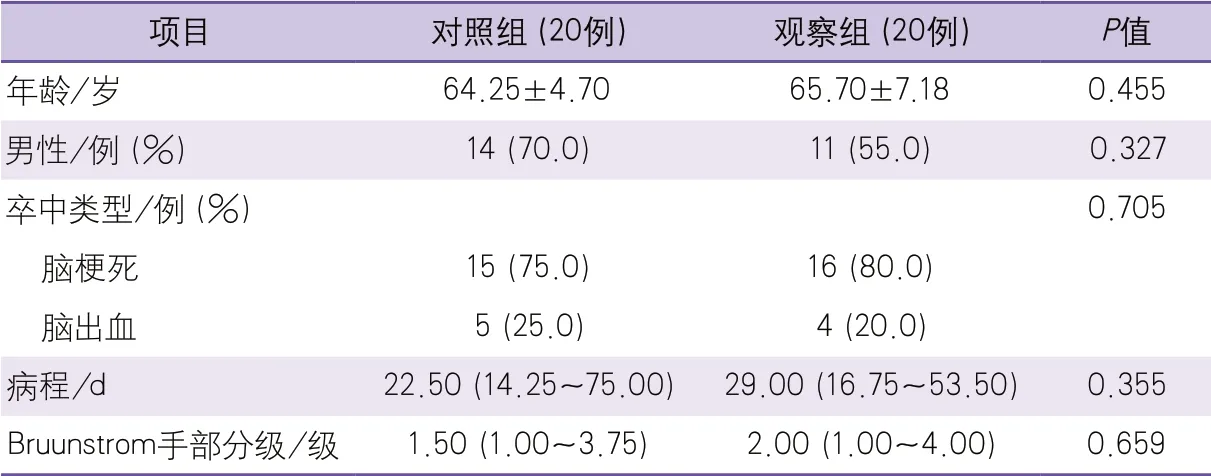
表1 两组一般资料比较
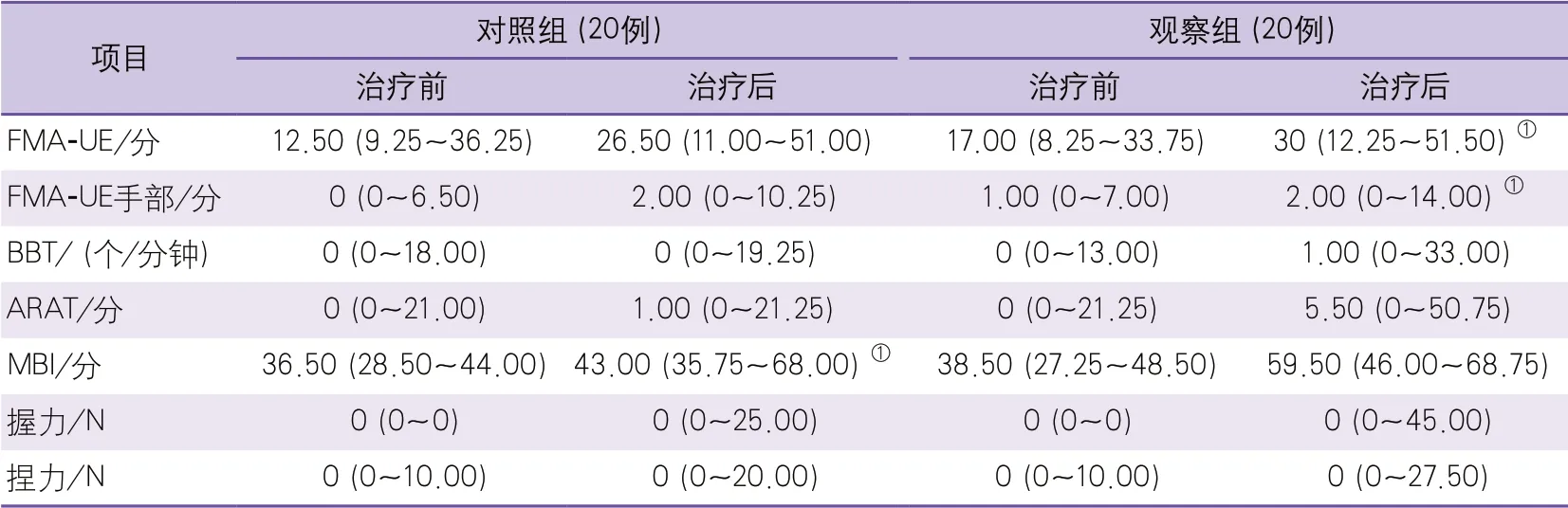
表2 两组治疗前后各指标评估结果比较
3 讨论
卒中后上肢手运动功能障碍康复能进一步有效提高患者的日常生活活动能力。镜像疗法与大量重复性练习均被认为是提高卒中后上肢手运动功能的有效治疗方法[8],相比人工训练,康复机器人能提供可持续性、高标准化的大量重复运动,目前已经辅助于临床治疗[9]。研究表明,双侧较单侧上肢训练的康复效果更好[10],该现象在双侧康复机器人训练中也得到类似治疗效果[11-12]。荣积峰等[13]使用康复机器人结合镜像疗法进行的一项临床研究发现,该治疗措施可以改善卒中患者的上肢运动功能和日常生活活动能力,镜像康复机器人作为康复机器人与镜像疗法“医工交叉”产生的一种新型训练模式,具有良好的辅助康复治疗效果[14-16],但此类临床研究报道在国内外仍较为罕见。
手部镜像康复机器人作为镜像疗法与康复机器人的融合,偏瘫侧手部运动由健侧手带动,其运动模式完全镜像模仿健侧手,患者可以通过健侧手佩戴的传感器手套自由控制患侧手的开合程度,实现运动控制与运动表现的精确匹配,这可能会诱导大脑皮质发生功能重组,促进功能恢复[17-18]。屏幕中手部影像与实际运动的匹配也可能使患者镜像神经元系统激活[19],在中枢系统兴奋性升高时训练,也符合“中枢-外周-中枢”手功能闭环康复理念[20]。
本研究结果显示,治疗前后组间各指标差异均无统计学意义。提示两种治疗方案均有一定的康复促进效果,但由于研究样本量较小,干预时间较短,可能是导致本研究治疗前和治疗后组间比较无统计学意义的原因。卒中后患者大脑皮层早期有较强的神经可塑性,故该阶段进行康复治疗可获得明显康复效果[21]。此外,治疗前后组内比较结果显示,对照组仅MBI评分高于治疗前,可能因为临床卒中亚急性期患者的康复治疗更多关注于下肢运动功能训练,使患者的步行与转移等下肢功能提高导致。观察组FMA-UE、FMA-UE手部评分高于治疗前,且FMA-UE与FMA-UE手部评分进步程度高于对照组,差异均有统计学意义,这说明卒中患者在亚急性期进行早期手部功能训练能够有效恢复上肢及手运动功能,镜像运动模式康复机器人对卒中亚急性期手运动功能有促进作用[22]。
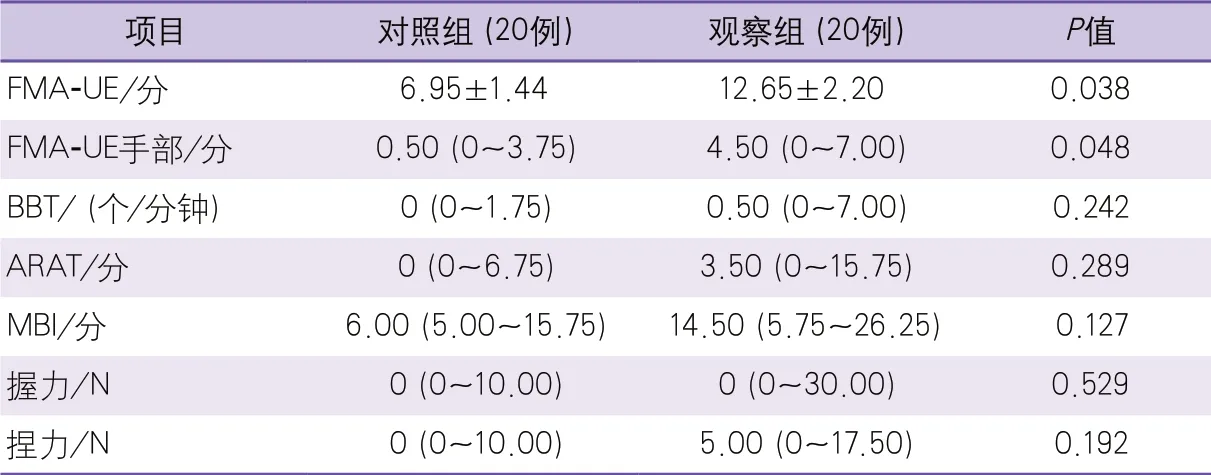
表3 两组治疗前后进步程度(各指标结果差值)比较
本研究结果还显示,两组BBT指标与ARAT评分差异均无统计学意义,推测原因可能为镜像康复机器人主要训练患者“握拳-放松”的手粗大运动功能,而BBT与ARAT主要评估患者的手精细运动功能与灵活度,同时患侧多为左侧非利手,故评估BBT与ARAT时难度较高,难以体现差异性[23]。此外,两组握力与捏力比较,差异无统计学意义。卒中后由于疾病损伤与长期卧床等原因,患者偏侧瘫痪的同时会伴随肢体肌力、肌肉耐力降低[24],本研究患者的肌肉耐力较差,患者手运动功能处于较低的功能水平,这可能是握力和捏力差异无统计学意义的原因。
综上所述,镜像运动模式康复机器人可以促进卒中亚急性期患者手运动功能的恢复。同时该机器人具有体积小,便于携带,操作简单等优势,可以作为卒中亚急性期手功能康复的辅助治疗方法。本研究也存在一定的局限性:未对治疗效果进行随访观察,患者发病时间较短、发病类型未作区分、运动功能受损程度较重,观察组训练方法较单一,研究纳入的样本量较小等,因此,还需进一步深入探讨镜像运动模式康复机器人的治疗效果。
【点睛】本研究旨在探讨镜像运动康复机器人对卒中后手运动功能的康复效果,并发现该康复机器人对手功能康复有促进作用。
