基于LDA主题模型与社会网络的专利技术融合趋势研究*
——以关节机器人为例
2021-04-07袁晓东
罗 恺 袁晓东
(1.武汉纺织大学会计学院 武汉 430074;2.华中科技大学管理学院 武汉 430074)
A Study on the Technology Convergence Trend of Patent Based on LDA and Social Network——An Example of Joint Robot
Luo Kai1Yuan Xiaodong2
(1.School of Accounting of Wuhan Textile University, Wuhan 430074;2.School of Management of Huazhong University of Science and Technology,Wuhan 430074)
Abstract:[Purpose/Significance]With the complexity of industry and technology, it needs to integrate multiple technical fields in order to innovate effectively. The research on the trend of technology convergence is helpful to provide the path of industrial innovation, promote technology convergence and identify emerging technologies.[Method/Process]The research uses LDA and social network method and takes joint robot patent as an example to classify topics from patent literature, refine technical keywords, construct the topics co-occurrence matrix between technical keywords, measure and analyze the trend of technology convergence. [Result/Conclusion]The results show that the patent technology convergence of joint robot present a small world, the convergence trend of mechanical body and drive structure, control system and drive structure is not obvious, sensor is the key core technology, the combination of robot and artificial intelligence is an emerging field of industrial technology development.
Keywords:joint robot patent; LDA; technology convergence; industrial technology development
0 引 言
高新技术产业创新过程中累积了大量的专利,专利的急聚增加一方面说明了创新十分积极活跃,技术的进步更新换代十分迅猛;但另一方面,带来竞争的日益激烈和技术构成的复杂化,需要多个细分的技术领域融合和制造而来,例如,关节机器人产业,又称“关节手臂机器人”或者“关节机械手臂”。随着人机共融技术不断深化,关节机器人技术得到了广泛的应用。《国家中长期科学和技术发展规划纲要(2006-2020年)》提出加强我国自主创新能力,为我国企业自主创新提供政策环境支持,国家“十三五”提出“创新驱动发展”,把创新战略上升到了国家级层面。因此,我国有一大批企业、高校、科研院所投入或者转型对关节机器人进行研发创新,如,清华大学、广西大学、国家电网、科沃斯、百度等,产销规模进一步扩大,根据中国电子学会发布的《中国机器人产业发展报告(2017年)》指出,全球机器人市场规模将达到232亿美元,据预测,关节机器人市场规模将达到88亿美元。全球竞争加剧,我国机器人市场潜力巨大,据统计,我国关节机器人销量将要超过6成。创新主体掌握大量的专利技术,这些专利技术融合在一起共同促进企业的技术创新。关节机器人产业作为早期单一的技术到如今多元化知识技术交叉、融合的高新技术产业,产业的技术创新进步需要多种学科知识和技术集成在一起进行创新应用,一个技术领域的发展往往依赖于其他技术领域的技术融合渗透,驱动发展。因此,技术融合已经成为关节机器人产业技术创新发展的重要模式。研究运用文献计量等多种技术融合测度方法研究技术融合的特征,分析融合趋势,宏观层面可以理解、认知关节机器人的技术融合趋势和创新轨迹,进而对技术融合趋势进行整体测度和研究;微观层面可以对技术融合网络中的各主要技术节点进行分析,衡量它们所扮演的角色和功能作用,测量它们的融合程度,判定哪些技术组合非常成熟,哪些可能是未来可以采取突破式创新的技术组合,分析潜在的技术发展趋势,对于产业洞察技术机会,制定技术创新发展战略具有重要意义。
研究选取关节机器人专利为研究样本,以往的研究虽然涉及了人工智能、工业机器人[1-2]等高新技术领域的技术融合问题,但研究的视角集中在技术机会,人工智能技术对其他产业的技术外溢、与其他产业如物联网、无人机产业的技术融合程度,忽略了智能机器人的细分领域如关节机器人的研究,因此,研究从专利关键词共现的视角,提出基于LDA主题模型的技术融合分析框架,应用多维衡量指标从技术融合的整体变化趋势情况,融合演化轨迹和技术融合网络中的各主要技术节点的融合程度和融合趋势的作用机理,对不同阶段我国关节机器人产业的技术融合进行多方面、多维度的趋势分析,以期把握专利技术创新发展趋势和规律,潜在的技术机会和创新方向。
1 文献综述
技术融合的概念最早被认为在不同产业中存在着相类似的技术[3]。随着技术创新不断发展,技术融合的研究日益受到学界的关注,赋予了技术融合新的概念,如技术汇聚、技术共现。部分学者[4-6]把技术融合看作是技术的集成,研究表明:融合由产品构建能力、技术选择能力、技术吸收能力及技术重构能力构成;融合本质是知识的产生、应用及维持,可分为专利组合、专利池、专利联营;技术标准中的专利越集中,集成能力越强。Iansiti[7]指出技术融合是吸收各种内外部技术知识并融合在一起,形成一个框架,在不连续的技术创新过程中,技术融合可以为产业有效的获取竞争优势。技术融合也可以被认为知识间的相互吸引,技术距离缩短产生融合,2种及以上技术结合成为一种或多种新技术[8]。从技术融合的界定可得,技术融合是指2个及以上技术领域,集成在一起,技术距离开始缩短,集成关系不断加深,演变成了技术的融合。
技术融合的研究聚焦于这几方面:(1)对技术融合的测量。技术融合的测量可以利用科学文献、新闻报纸、R&D合作,但专利被认为是最可靠、最能反映出最新技术信息的数据。现有文献主要利用专利引文、IPC、德温特手工代码共现的方法来测量技术融合。刘鑫等[9]提出中国3D打印专利在技术结构上的不均衡性和技术融合上的多样性;一些产业内不同技术领域关联的专利越多技术融合度越紧密。反之,则越弱[10-11];Ohjin Kwon等[12]提出了一种基于专利共类分析方法来测量跨产业融合;Jeonghwan Jeon等[13]选择了韩国安全技术领域专利,提出了如何识别核心技术,技术融合有利于扩展开放式创新。(2)技术融合对企业绩效的影响研究。现有研究不仅关注于产业内部的技术融合,还逐渐深入到跨领域的技术融合和其对企业绩效的影响研究。跨领域的技术融合更能打破技术知识边界,催生新的技术,提高企业绩效。王媛等[14]将技术融合分为替代性技术和互补性技术融合,以新能源汽车产业为例,研究发现:跨领域的技术融合有利于新产品开发绩效;部分学者[15-16]认为技术融合、企业动态能力对企业绩效有积极影响,尤其是技术融合网络中拥有中心度较大的核心技术企业,更能促进企业的创新绩效。(3)技术融合趋势研究。上述研究都是对技术融合进行静态的测量,无法观测出融合的趋势和把握技术的演进规律。苗红等[17]认为研究技术融合趋势有重要意义,能把握技术轨迹的变化规律,宏观上把握产业发展方向,识别出新兴产业,微观上看出每个技术节点起的作用以及识别潜在的新兴技术,并以老年可穿戴技术进行了实证研究;冯科等[18]认为对跨产业层面的技术融合趋势研究,有助于为产业政策制定提供支撑并分析了电子信息、装备制造业、汽车三大产业的技术融合趋势;此外,有研究[19-21]对无人驾驶、3D打印、健康医疗服务产业进行了技术融合趋势的分析。
现有研究大部分是基于专利IPC(国际专利分类号)共现的方法,构建IPC关联指标或者利用德温特专利数据的手工代码,进行技术分类,测量技术融合程度。虽然,IPC和德温特手工代码能反映一定程度上专利技术的融合性和创新,但目前的IPC分类与产业技术领域对应不十分准确;其次,IPC分类粗泛,最新技术无法细致体现。最后,无论是IPC和德温特手工分类代码更新滞后,反映不出专利文献中所要表达的最新技术信息。现有研究也通过ISI-SPRU-OST与IPC相匹配的方法将产业进行技术领域的分类进行研究技术融合,这种方法不十分精确,因为IPC分类与产业链的划分出入很大,如机器人产业涉及较多技术领域,没有能够与之精确划分其产业链的IPC匹配。因此,用IPC分类方法有时很难描述产业的技术融合。我国的高新技术产业技术融合特征是什么?随着高新技术的复杂化、多元化,技术的融合成为大势所趋,那么在融合趋势是什么?各技术节点融合程度,哪些是优势技术?哪些是未来可以进行突破式创新的?因此,研究上述问题,从深度上补充了我国高新技术产业技术融合理论研究。
区别以往构建IPC共现网络测量技术融合的方法,研究试图提高技术融合网络模式的精准性,从海量的专利文献中对技术的关键信息内容进行挖掘和高频词统计;利用LDA主题模型聚类方法与产业实际情况相结合,将技术关键词依据聚类的主题词进行分类,取每个类中出现的前100名的高频词,然后进行统计;将不同类中出现的共现词进行提炼出来,形成共现矩阵,跟踪观测前后阶段主题词共现的频次,利用社会网络的方法和余弦相似性模型对该技术共现矩阵进行分析,反映出技术融合发展前沿趋势。
2 研究设计
2.1研究思路专利作为衡量技术的重要指标和载体,包含了全球90%以上的技术信息[22]。专利已逐步被用于衡量技术融合发展轨迹,反映了技术轨迹中知识的积累和进步,因此,基于专利文献来研究技术融合度及趋势是可行的。研究以专利数据为研究样本,研究思路由如下部分组成。
第1部分,建立专利数据集和LDA主题模型技术聚类。进行专利文献检索,用python中的jieba包进行分词,利用TF-IDF算法对专利文献中的技术关键词进行词频统计和权重计算,再用LDA主题模型对分词后的关键词进行主题聚类,建立不同技术领域专利关键词子集;第二部分,对归类的技术主题中的关键词进行共现矩阵的构建,利用社会网络指标测量各技术领域关键词构建的技术融合网络,研究技术融合趋势。LDA主题模型的原理如图1所示。

图1 基于LDA主题模型技术融合原理
2.2研究方法
2.2.1 LDA主题模型聚类 LDA全称Latent Dirichlet Allocation,是一种文档主题生成模型,也称为三层贝叶斯概率模型,已有研究[23-25]逐渐用 LDA 模型对智能手机、安全技术产业进行了技术融合测度,得出了LDA是有效的测度技术融合和专利内容分析的方法,但基于的是德温特手工代码,有一定滞后性也无法反映出技术前沿,以及只考虑了同一主题类中关键词之间的共现,局限于某个技术的内部融合,缺乏对跨技术主题间的融合研究,英文专利文献中的英文单词独立,不需要进行分词,而中文的专利文献需要对文本内容进行分词,因此,区别以往研究,将LDA和TF-IDF结合在一起研究基于中文专利文献的技术融合。LDA 模型假设词是由一个主题产生,同时呈现一个多项式分布,这些主题被分布在得到的相关文献中,从 Dirichlet 分布中抽样产生,如公式(1)、(2)所示。
(1)
(2)
LDA结构模型完整清晰,采用高效的概率推断算法处理大规模数据,是目前研究非常流行的一种文本聚类分析方法。研究对象基于的是中文的专利文献,首先提炼出摘要,建立摘要数据集,然后,对摘要内容进行去除停用词、分词后,提炼出有价值、高频的技术特征词,为LDA分析做准备,研究采取TF-IDF算法进行文本处理,如公式(3)所示。
(3)
TF-IDF算法是一种广泛的用于计算文本中关键词权重的方法。其原理统计出每篇文献中关键词的数量,然后计算出关键词的词频,依据上述公式计算出词频的权重,来衡量判断该词是否为技术关键词。
2.2.2 技术融合分析 研究将LDA提炼出的技术关键词与其对应的最优主题数结合起来,对两两组合的关键词同时出现在主题类的次数进行分布统计,描述具体技术间的融合结构,进而构建主题数——技术关键词共现矩阵。运用ucinet和社会网络分析方法、工具对共现矩阵进行网络可视化,构建融合分析指标,研究技术融合,如表1所示。

表1 技术融合指标
有研究表明,相似性越高的技术,融合概率越大,越能促进渐进式创新,反之融合的阻碍越大,差异性越大,有可能未来产生突破性创新[26]。研究利用余弦相似性计算技术融合网络中节点间的相似性,分析潜在的技术融合趋势。计算公式(4)为:
(4)
Sij为技术i与技术j的余弦相似性指数,k代表技术类别数量,Cik(Cjk)代表技术融合矩阵中的值。
3 实证分析
3.1数据来源与阶段划分研究选取专利数据库incopat和国家重点产业专利信息服务平台作为专利数据的来源。为了分析技术融合的演化规律,以申请日为1998-2018年间,检索出在中国申请的关节机器人发明专利,检索时间为2020年7月1日,检索策略参考国家知识产权局《产业专利分析报告——关节机器人》[27]给出的关节机器人技术分解和incopat的扩展检索功能确定的专利检索关键词,并结合关节机器人产业的发展历程。产业发展经历了转轴关节、驱动关节技术、现在的智能化渗透融合三个阶段。因此,研究按照关节机器人产业发展历程,分为1998-2004、2005-2011、2012-2018三个阶段分析技术融合趋势。如图2所示。

图2 关节机器人发展历程
依据划分的关节机器人发展历程和专利检索词,得出关节机器人产业专利历年分布,如图3所示。

图3 关节机器人产业历年专利申请量变化趋势
从图3可以看出,截止到2018年关节机器人专利不断发展,专利的申请量每年呈上升趋势,增长速率逐年加快。图3显示了关节机器人产业发展的三个阶段的专利申请情况。关节机器人专利申请数量在1998-2004年间机器人产业处于萌芽阶段,关节机器人的应用范围比较狭隘,智能型机器人还未形成,因此,这一时间段的专利每年申请量较少,增长速率较低,产业发展较为缓慢;2005-2011年间,较之前,专利申请量逐年增多,但我国关节机器人产业发技术发展还是比较滞后;2012-2018年以后,随着我国陆续出台创新、产业发展政策,为我国关节机器人技术发展营造了良好的创新环境,人工智能技术不断进步并在机器人领域得到了广泛的应用,这一阶段专利增长速度明显加快,涌现出大量专利,我国关节机器人产业进一步得到发展。
3.2技术融合分析
3.2.1 LDA主题聚类分析 利用python分析工具,依据TF-IDF算法和LDA主题模型原理,对获取的1998-2018年间关节机器人发明专利进行文本挖掘,提炼出技术关键词,进行主题聚类,划分出每个主题类下的前100个高频词。LDA主题的确定一直是一个难题,目前尚未出现比较精准有效的确认方法,调用python中的scikit-learn中的LDA函数,需要设定一个必要参数主题数量N才能进行聚类分析,主题确定有很多种选择,依据Sievert等[28]和王树义等[29]提出的LDA可视化分析,利用pyLDAvis工具包并结合关节机器人技术分解和产业链的划分[27],困惑度指标,确定出主题数。1998-2004、2005-2011、2012-2018年三个阶段困惑度分别为11195.8908、2958.6525、1435.3421。从图4(a-c)中可以看出,三个阶段的主题数在二维空间向量上有明显的差别,不

(a)1998-2004年LDA可视化

(b)2005-2011年LDA可视化
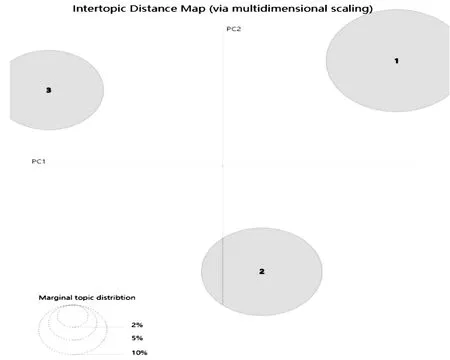
(c)2012-2018年LDA可视化
存在主题间的交叠,困惑度指标较低,LDA划分主题没有一个“完美结果”。三个阶段确定的主题数量较为合理。将聚类的主题归为机械本体、驱动结构、控制系统、控制软件算法。
由于篇幅有限,具体三个阶段的主题数和主要提取归类的关键词,如表2所示。从表2可以看出,关节机器人各技术领域特征各不相同,机械本体主要以装置、机械手为主;驱动结构以电机为主并与机械本体融合在一起;控制系统以传感器为代表并结合机械本体。

表2 各阶段LDA主题聚类(部分)
用python将划分好的技术主题进行词云可视化,如图5所示。图5为各阶段主题词云图。从图5可以看出,机械本体的技术特征在于机械手。驱动结构的优势技术在于驱动装置和连接装置;控制系统与机械手关联的比较紧密,关节机器人技术融合主要以机械本体中的机械手为主融合驱动结构和控制系统,机械手是关节机器人核心产品技术,反映出了技术发展的趋势,机械本体中的其它技术和驱动结构相结合比较少,将成为关节机器人的“卡脖子”技术。另外值得注意,从词云图中看出,关节机器人与医疗手术技术有融合的趋势,应用于医疗行业将会成为未来机器人产业发展的热点。控制软件算法在2005-2011年阶段成为独立主题4,可见是我国关节机器人专利技术优势之一,通过控制软件算法使得机械本体完成多种任务。

图5 技术关键词云图
3.2.2 技术融合趋势整体分析 为了研究关节机器人产业技术融合的趋势,对获取的关节机器人发明专利按照1998-2004、2005-2011、2012-2018三个阶段分别进行LDA主题聚类后,将得出的各主题数下的前100个高频技术关键词汇总在一起,用python和excel进行处理得到技术主题共现矩阵,矩阵中两两元素的共现频次表示共同出现在各个主题中的次数,将共现矩阵进行标准化处理,导入ucinet社会网络分析工具,生成可视化的技术融合网络趋势图(如图6所示)。通过前后阶段同一技术组合共现的延续观测出技术融合的趋势,例如,在技术融合网络中两个节点共现频次≥2,意味着下个阶段它们也出现在同一个主题中,该方法可以观测出技术融合发展变化的轨迹,从而确定融合趋势,反映出前后阶段主题的继承性。共现矩阵中两节点主题共现频次最大值为8,因此将主题共现频次上限设置为8(由于篇幅有限,图6(a-c)只展示出主题共现频次前4的技术融合趋势),观察不同主题共现频次,以此研究分析技术融合动态变化规律。此外,将LDA主题聚类划分得主题结合关节机器人技术分解和产业链的划分,使用ucinet将技术融合网络设置为四个聚类:聚类1(控制系统/驱动结构)、聚类2(机械本体/控制系统/驱动结构/控制软件算法)、聚类3(机械本体/驱动结构)、聚类4(机械本体/控制软件算法),以此研究在不同阶段局部融合趋势和规律,最后观测出整体融合的趋势特征。

图6 技术融合趋势图
通过上述分析,归纳出关节机器人技术融合演化趋势,如图7所示。

图7 1998-2018技术融合演化趋势
1998-2018年间,整体技术融合网络密度较大。这表明,关节机器人产业中的创新主体从原来的封闭式创新逐渐转轨为开放式创新,我国分散着大量的下游关节机器人供应商,他们进行研发合作,整合技术资源,使得关节机器人技术不断多元化发展。我国关节机器人的技术优势还是集中在机械本体和控制系统上,这与我国在关节机器人核心技术驱动结构中缺乏芯片技术有关,驱动结构的融合趋势不明显。从整体技术融合网络主题共现频次动态变化可以看出,聚类1即控制系统与驱动结构的融合较聚类3机械本体与驱动结构的融合更加紧密,可见控制系统在关节机器人产业技术发展中起到了中间层的作用。聚类4在主题共现频次≥3融合趋势开始变得较为松散,其中涉及到控制软件算法中的硅片技术,关节机器人在医疗手术中的应用,这表明关节机器人产业在控制软件算法技术中有较大的发展潜力,目前关节机器人在应用层面的创新还不够,是将来技术创新、产业发展的路径之一。从整体技术融合趋势来看,主题共现频次≥3以后,除了聚类2以外,其余的聚类融合较为松散,这表明关节机器人技术融合趋于社群融合,各个技术领域整合在一起进行融合,局部融合放缓,整体融合加强,各技术领域偏向集成在一起,反映出将来关节机器人产业趋于集群化发展。
为了测量各阶段关节机器人产业专利技术融合的程度,研究利用社会网络指标,通过ucinet工具计算1998-2004、2005-2011、2012-2018年三个阶段的技术融合指标包括:聚类系数、平均最短距离、网络密度、度中心性、中介中心性、特征向量中心性,如表3所示。三个阶段的聚类系数值都比较大,平均最短距离也较小,根据小世界理论,满足聚类系数大于0.1而平均距离小于10的网络为小世界网络。关节机器人的技术融合呈现出小世界,最多通过1—2个节点就可以进行局部联系,这表明创新扩散的速度很快,网络吸收异质知识信息效率非常高,但网络的中介中心性值逐渐降低,这说明随着技术融合规模的扩大,网络整体的沟通距离缩短,整体技术融合的紧密性提高。

表3 整体技术融合指标测量值
3.2.3 节点技术融合趋势分析 表4显示了1998-2018年间排名前10位的技术融合高频词在不同阶段技术融合测量指标值。由表4可知,传感器技术中心度值较大,说明我国在关节机器人控制系统尤其是传感器技术存在技术优势,是核心关键技术,与机械本体和驱动结构融合。早期驱动结构中心度值和特征值向量中心值与控制系统、机械本体技术领域相比较低,说明驱动结构是我国关节机器人技术发展的薄弱环节,容易造成国外“卡脖子”,但2012-2018年间中心度值增加尤其是驱动结构中的电机,这反映我国开始完善技术链的布局,多元化发展。从三个阶段来看,主要技术节点特征向量中心值趋于下降,表明技术节点的相对价值降低,表明我国的关节机器人技术创新模式从原来的以单一技术为核心的发展模式转轨为多个技术集成在一起的集群发展模式。从主要节点的融合来看,关节机器人从早期单纯的机械手臂,发展到与驱动技术、控制系统进行结合运转,再到医疗,人工智能等领域与智能机器人相互渗透融合,应用到不同场景。与机器人结合形成智能化的关节机械臂是关节机器人发展的大势所趋。
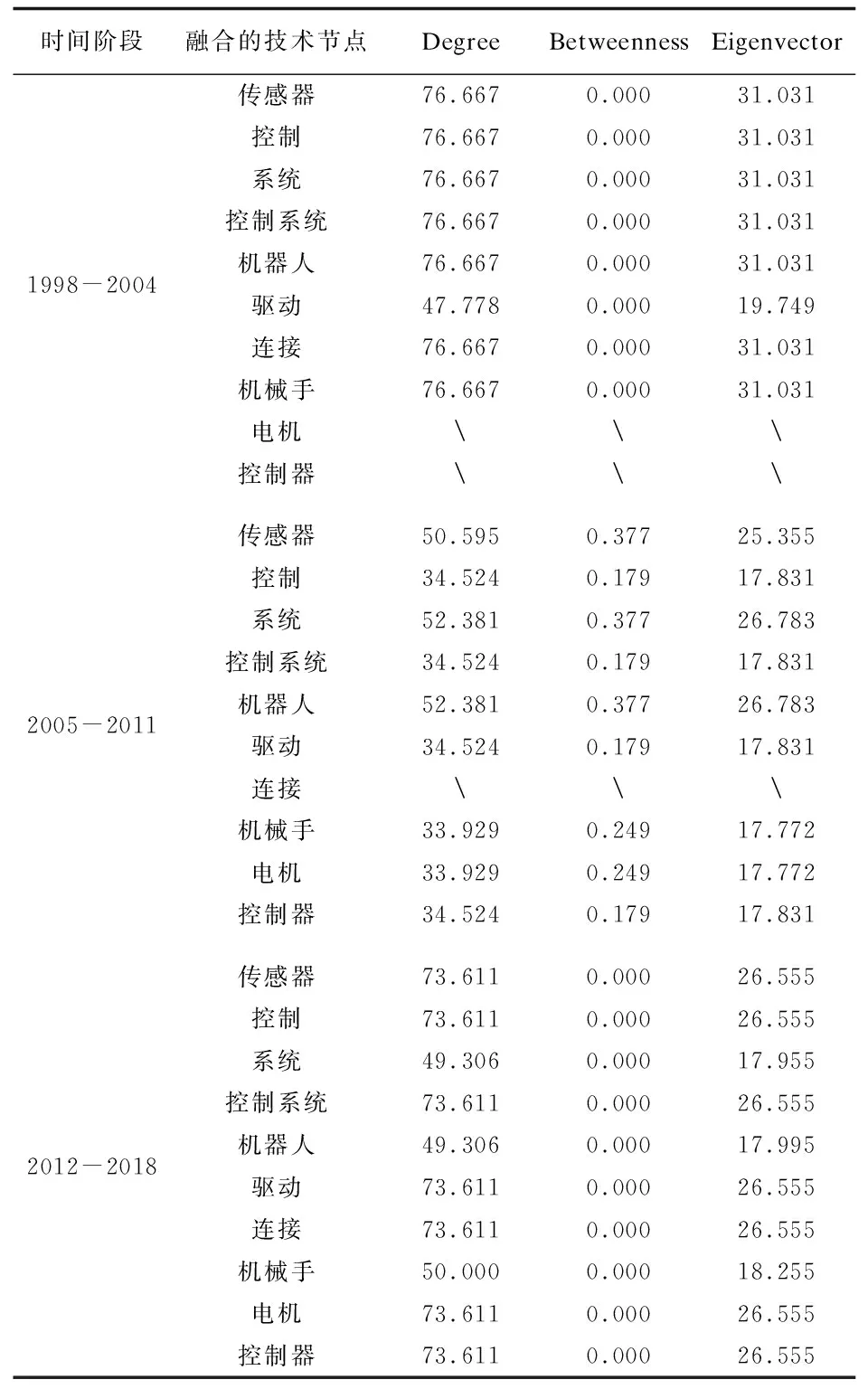
表4 1998-2018年主要节点技术融合指标趋势
技术相似性计算结果如表5所示。 传感器-机器人、驱动-控制、移动-机器人等技术组合的关联度非常大,在关节机器人技术融合中起着重要作用。机械手-操作台、控制器-存储技术组合相似性值较小,这表明关节机器人在应用层面的运用还不够,未来如果能够有效促进这些技术组合的关联与融合,很有可能在这些技术领域中实现突破式创新,应引起技术创新和专利管理者的高度关注。

表5 不同阶段技术相似性计算结果(部分代表性技术组合)
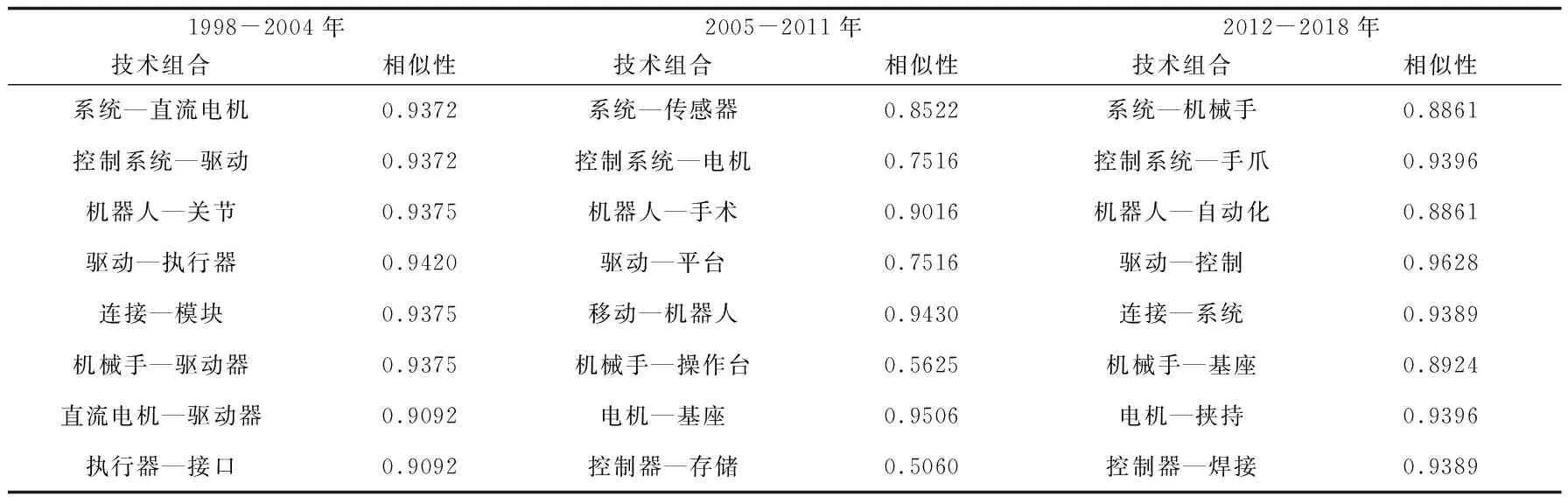
续表5 不同阶段技术相似性计算结果(部分代表性技术组合)
4 结 论
主要贡献和创新点在于:研究基于1998-2018年在我国申请的关节机器人发明专利数据,构建了一种LDA主题模型和社会网络指标结合的方法,运用python、ucinet软件研究了我国关节机器人专利整体和各个关键节点技术融合趋势。区别之前通过IPC共现和专利引文分析技术融合趋势,研究较合理和科学的解决了IPC分类与产业和技术领域划分有时不能匹配,划分不精确的问题,通过LDA可视化和困惑度指标结合产业和技术链划分的实际情况,确定不同阶段的主题数,构建关键词主题词共现频次矩阵,通过观测不同主题数共现频次下的技术融合可视化网络的演变,研究分析前后阶段技术节点的延续性,从而判定出技术融合动态演化轨迹和特征,然后通过网络中心度、中介中心性、特征值向量中心性、技术相似性指标对技术融合整体网络和各个关键节点的技术组合融合程度进行了分析,本方法优势在于不拘泥于专利制度对技术领域的划分,而又基于专利文献信息,聚焦于产业和技术领域的实际情况,通过LDA聚类划分主题数,反映出产业和技术发展的前沿。此方法可以为产业政策制定者和技术创新管理者提供有效的数据分析方法,为决策做支撑。此外,研究得到了以下结论:
a.通过LDA主题聚类可视化和困惑度指标划分的主题显示没有交叠,困惑度指标较低,表明各阶段划分的主题数量较为合理,也符合产业和技术的实际划分情况。具体分为:机械本体、控制系统、驱动结构、控制软件算法。通过技术融合可视化网络观测可得:控制系统与驱动结构、机械本体与驱动结构两两融合趋向于松散,技术融合特征趋于整体融合,产业和技术创新发展向集成创新模式转轨。从社会网络指标分析来看,技术融合呈现小世界态势,各技术领域内的节点平均最短距离缩短,技术交流效率提高,整体网络变得稠密。
b.从技术融合网络中主要节点测量指标来看,特征向量中心值有下降的趋势,融合从早期的以传感器、机械手臂等单个领域为中心节点连接形成多种技术集成在一起进行融合。
c.从各技术节点两两之间的技术相似性值来看,关节机器人早期通过机械人与关节结合的比较紧密,但技术含量较低和应用的领域有限,此后,发展为以整个机器人与各模块相连接。机械本体与应用层面技术相似性较低,但机器人与自动化技术相似性值较大,这说明我国关节机器人应用前景巨大,与人工智能结合是技术创新和产业发展的路径之一,也最有可能在这些领域实现突破式创新。
