应急自动复苏呼吸机装置设计
2021-04-01任宝凯程进邹小平刘宝宇李光东王骏琦周子肖余兴王一飞李晓彤王晓岚
任宝凯 程进 邹小平 刘宝宇 李光东 王骏琦 周子肖 余兴 王一飞 李晓彤 王晓岚
北京信息科技大学北京市传感器重点实验室,北京 100101
0 引言
呼吸循环衰竭是临床急诊科中的多发性危急重症。近年来的医学统计数据显示,该症发病率呈现出逐年上升的趋势,多发于中老年群体,同时,随着溺水、中毒以及创伤等事件频频发生,呼吸循环衰竭病例也明显增加。该病在病情上具有危急、变化快的特点,对抢救时间、效率均有着较高的要求。一般情况下,在患者发病初期(约4 min内),需立即对其进行心肺复苏治疗,并在复苏后及时给予呼吸和循环支持,才能有效地提高抢救成功率[1]。针对这一情况,我们研制的应急自动复苏呼吸机系统可自动对被施救人员进行机械式辅助呼吸,从而维持呼吸循环衰竭[2]人员的血氧含量,为其争取宝贵的抢救时间。该装置成本低、体积小巧、便携,可灵活应对突发事件。主要的应用场所为家中、公共场所、游泳馆、救护车、医院等有事故隐患的地点。当遇到突发事件,有人需要紧急抢救时,可在附近找到该设备并对其进行自动、持续供气,既避免了人工呼吸造成的卫生问题,又避免了使用手动复苏面罩造成的人手疲劳、供气不均问题。配合心脏复苏机[3]一起使用,可节省大部分的抢救空间和时间,进而大大提高抢救效率和生还率。
此外,由于新型冠状病毒[4-7]引起的肺炎肆虐全球,导致各国医疗物资严重匮乏,尤其是对呼吸机的需求很难得到满足,导致很多肺炎患者不能得到及时辅助治疗,而使疫情难以得到控制。由于目前医用呼吸机的制造成本与技术等原因,这个缺口是很难补足的,所以设计一个简易的医用呼吸机[8]替代品是非常必要的。本文研制的应急自动复苏呼吸机技术、结构简单,可大批量生产,配合专业医务人员的操作和使用,可在一定程度上满足疫情导致的呼吸机需求。
1 系统设计
1.1 系统的总体框架
本系统分为6个模块:电源模块、控制模块、驱动模块、动力模块、运动模块、输气模块。整个系统的结构框图如图1 所示,其中控制模块采用STM32单片机;驱动模块采用挡位切换式步进电机驱动器;动力模块采用步进电机;运动模块采用滚珠丝杠滑动平台机构;输气模块由手动复苏面罩输气系统改进而来,面罩与气囊间增加输气管以增加其工作半径。

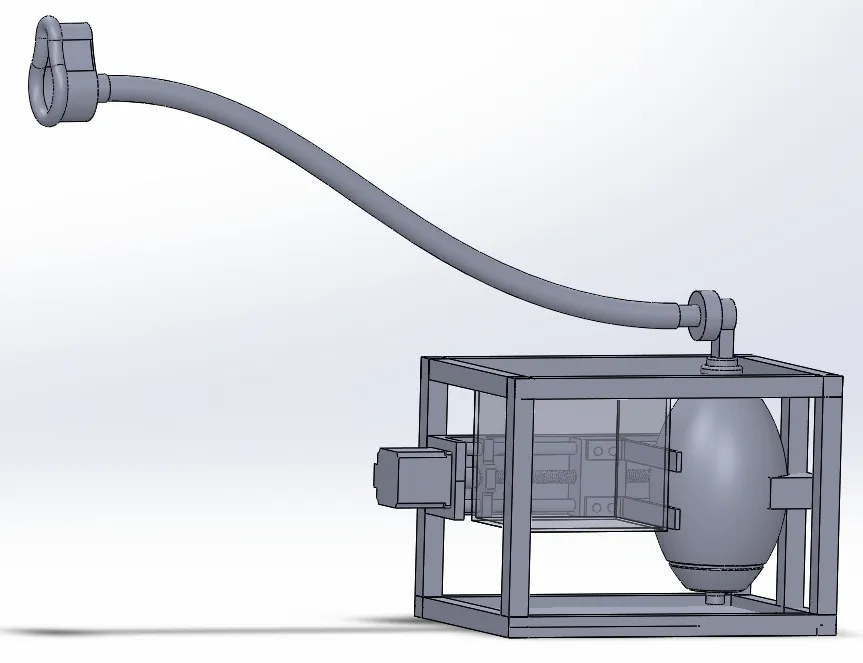
本呼吸机将挤压和释放气囊的施力源改为电机驱动,滚珠丝杠滑动平台为双导柱—单滚珠传动丝杠实现滑块的直线往复运动,悬伸臂与滑块相连接,通过滑块带动悬伸臂实现对气囊的压缩和释放效果。此外,动力源为57步进电机[9],配合TB6600步进电机驱动可调节悬伸臂压缩和释放气囊的速度,从而控制输气模块的出气量。控制模块采用STM32F103系列单片机[10],该系列单片机性能稳定、功耗低,可实现对整个机电系统的稳定控制。根据各模块的连接关系,绘制装置三维建模图如图2所示。
1.2 系统硬件设计方案
1.2.1 控制模块、驱动模块和电源模块
控制模块、驱动模块和电源模块硬件连接如图3 所示。
单片机采用STM32F103RCT6型号,TB6600步进电机驱动的使能负(EN-)、转向负(DIR-)、脉冲端负(PUL-)共地,3个引脚接在单片机的GND。单片机的PC0引脚接驱动使能正端(EN+)、PC1引脚接驱动方向控制口正端(DIR+)、PB0引脚接驱动脉冲接收口正端(PUL+),同时,TB6600采用220~12 V直流电源供电。除此之外,A、B两相的正负极分别对应接57步进电机的A、B相的正负极,单片机的PA0、PA1分别连接启动和停止按钮,方便操控。
TB6600步进电机驱动采用共阴极接法,控制57步进电机转向与转速方法如表1所示。
1.2.2 运动模块
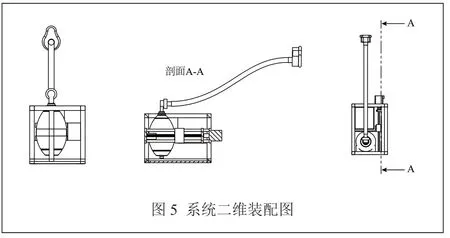
步进电机通过8~8 mm联轴器与滚珠丝杠相连接。电机带动滚珠丝杠从而带动滑块进行横向滑动,同时双导柱对滑块起导向作用,从而使其平稳滑动。用于压缩气囊的悬伸臂与滑块采用螺钉连接,通过滑块的带动悬伸臂压缩和释放弹性气囊。滚珠丝杠平动滑台的二维图如图4所示,系统二维装配图如图5所示。
1.2.3 输气系统
输气系统由手动复苏面罩改进而来,弹性气囊顶部出气口接入1 m长的PVC输气管,从而增加装置的工作半径。弹性气囊底部与顶部都安装有单向阀,通过滑块带动悬伸臂压缩和释放弹性气囊,可实现气体的单向传输。弹性气囊底部设有输氧口,可插入输氧管,针对不同的情况进行选用。


表1 TB6600电机驱动控制57步进电机方法表

1.3 系统的软件设计
1.3.1 系统工作流程设计
系统的软件流程如图6所示。工作时,当使用者按下启动按钮,悬伸臂装置在步进电机的带动下从初始位置向前行进压缩气囊。程序进入延时,经过延时4 s后驱动方向引脚置零,电机反转,从而悬伸臂装置在步进电机的带动下从初始位置后退进行气囊的释放,再次进入循环程序,延时4 s后程序重新进行上述循环。当使用者按下停止按钮,系统监测到低电平,便使装置复位并停止工作。
1.3.2 系统软件程序设计




2 系统功能的实现与验证
首先要保证各引脚的连接是否牢固,开机观察电源指示灯是否亮起,按动启动开关,系统开始工作,伴随着滚珠丝杠的转动,带动滑块压缩和释放气囊,同时检查运动速度和出气量,调节TB6600步进电机驱动的挡位,可调节步距角和工作电流,以输出合适的功率。
确保输气系统畅通,气阀的安装方式无误,测试气压是否符合医用标准,医用标准呼吸机气压标准值在10~30 cmH2O,经测试该装置满足要求。
连续工作测试:该装置采用12 V/5 Ah锂电池供电,要求系统可连续工作40~60 min左右才能保证被救人员被转移至专业救助地点。经测试,系统工作时的最大电流为0.75 A,采用的锂电池能够可靠地保证1 h以上的连续工作时间。装置工作情况如图7所示,实物图如图8所示。
3 系统特点
(1)本系统改变传统复苏面罩的动力源为电机驱动,节省人力,提高抢救效率;
(2)本系统操控简单,性能稳定,体积小巧、便携,适用性强。
4 结束语
该应急自动复苏呼吸机可节省大部分的抢救空间和时间,从而在很大程度上提高抢救效率。目前的趋势就是要利用机电系统代替人力,同时也会提高工作效率。在医疗领域将机电系统与医疗器械合理地结合,从而达到高效稳定的目的。研发该系统可更灵活地应对突发事件,减轻救援人员的负担,保障人们的人身安全,进而减少人员伤亡。本系统将嵌入式系统与医疗器械进行结合,节省了人力物力、提高了安全性,可以设置在任何存在隐患的场所,成本低,实用性强且需求量大。
本系统仍然存在一些不足之处:所用的材料为金属材料,重量较大。可采用PVC材料代替,以增加装置移动灵活性。除此之外,此装置可与传感器相结合,用传感器采集气压、出气量、被救者的生命体征指标等。


