基于CADe SIMU 的三相异步电动机仿真分析
2021-03-30潘春玲
潘春玲
(泉州经贸职业技术学院 信息系,福建 泉州362000)
0 引言
三相异步电动机具有工作原理简单、结实不易损坏、价格便宜、性价比高等优点,被广泛应用于生产设备中。据统计,75%以上的用电设备是由三相异步电动机来带动的,因此要合理设计三相电动机电路,从而保证生产设备按要求工作。
三相电动机控制电路是高校“电工学”的重要学习内容,也是学生考取中高级电工证的重要考查内容,通过本部分内容的学习,不仅要求学生能够熟练使用控制电器搭接基本控制电路,掌握电路的组成和运行原理,还要求学生掌握这些电路的设计原则和设计思想,并能够根据不同的控制要求设计合理电路,为后续学习PLC 打下基础。目前,许多高校都配备有完整的电动机实验设备,学生通过接线操作,基本上可以达到了解电动机基本控制电路的要求,但是在设计电路部分还存在一些困难。一是目前多使用接触器、继电器等电器控制电动机,而这些电器的接线都比较复杂,在设计过程中如果出现故障,不容易排查;二是三相异步电动机使用的是电压较高的三相交流电,一个电路设计完成后,如果在可行性不确定的情况下通电运行,会存在一定的风险。
随着计算机技术的发展,各种仿真技术不断出现和完善,能够很好地帮助我们设计三相电动机的各种控制电路。借助仿真软件,可以先在电脑上设计电路,确保设计的电路可行之后,再进行实际的接线操作,这样可以提高设计的效率和灵活性。
1 CADe SIMU 简介
目前对三相异步电动机的仿真分析,有的文献使用Multisim。Multisim 虽然能很好地模拟数模电路、射频电路,并能提供完备的分析手段,但却很少应用于电动机控制电路的仿真,因为Multisim在电气控制方面能提供的电器种类有限。例如,它没有符合规格的保险丝,不提供现成的交流接触器等,对于交流接触器的处理,通常实验者会提前将来自不同元件库的线圈和触点封装在一个子电路中,利用触点实现的“自锁”和“互锁”功能也一起封装在子电路里,用该子电路来代替交流接触器,因此绘制的电路图不够直观,灵活性也较差。
CADe SIMU 是一款轻量级的电气制图软件,无需安装,可直接下载使用。它提供了各种丰富的电气符号,供用户直接调用,可以帮助用户绘制标准的电气控制电路图并支持仿真。本文以两台三相异步电动机运行控制系统为例,说明CADe SIMU 在电动机控制中的应用。
2 三相异步电动机仿真分析
2.1 控制要求
三相异步电动机仿真的控制要求为:有一台设备由两台电动机M1 和M2 带动,电动机M1 可以点动控制,也可以正反转连续运行控制,电动机M2 要求在M1 正转3 秒后才能启动,M2 运行4秒后,M1 进入能耗制动,能耗制动持续3 秒后M1停止,M2 必须在M1 停止后按停止按钮才能停。该题目集合了点动、启保停、顺序、能耗制动多种控制电路,通常在课堂上各个电路是分开来介绍的,每一个独立电路的设计都不难,但像这样多种电路集中在两台电动机上还比较少见。因控制要求较多,涉及的电器也较多,建议学生在动手接线之前先进行仿真设计。
2.2 主电路设计
本例电路的设计包括主电路和控制电路两部分,下面先介绍主电路。主电路的设计如图1 所示。

图1 主电路设计图
三相交流电源380V 和直流电源220V 取自CADe SIMU 电源工具栏,三相空气开关QF 接在三相电上,通过KM1 触点的接通,三相电以U-VW 正序加在电动机M1 上,KM1 控制M1 正转,KM2 三个闭合的主触头将三相电中的U 相和W相对调,三相电以W-V-U 的方式,逆序加在电动机M1 上,KM2 控制M1 反转。KM4 用来接通直流电220V,在M1 内产生反向磁矩,使M1 能耗制动。KM3 用来控制电动机M2。不同于Multisim,所有的接触器都可以从CADe SIMU 的工具栏里找到,无需自己制作封装,操作简单方便。此外,热继电器FR1 和FR2 用来对M1 和M2 做过载保护,将它们的热元件分别与M1、M2 串联连接。
2.3 控制电路设计
具体的控制要求通过控制电路的设计来实现,图2 为三相异步电动机的控制电路设计图。控制电路的供电是交流380V,接在两根火线上,具体电路设计说明如下:
控制电路从左到右依次分为M1 正转运行、M1 反转运行、M2 运行、M1 制动四个模块。首先是一个实现M1 正转连续运行的启保停电路,闭合SB2,KM1 得电自保持,电动机M1 连续正转。此外,M1 还能进行点动控制,点动意味着要解除接触器自锁。SB5 是正转点动开关,这里采用复合开关,因两种启动方式是或的逻辑关系,将SB5 的常开触点和SB2 并联;要在按下SB5 时,解除电路自锁,把SB5 的常闭触点和KM1 自锁触头串联,这样连接保证在电动机M1 启动的同时自锁支路断开,实现点动控制。

图2 控制电路设计图
由于电动机M2 要求在M1 正转3 秒后才能启动,因此将时间继电器KT1 的线圈和KM1 线圈并联连接,让两个线圈同时得电,在M1 正转启动的同时,启动KT1,KT1 设定时间为3 秒。按下停止按钮SB1,电动机M1 停止的同时KT1 复位。SB4 控制电动机M1 连续反转,SB6 控制电动机M1 点动反转,同样使用复合开关,SB1 也是反转的停止按钮,电动机M1 反转的电路连接和正转类似,这里不再详述。另外,KM1 和KM2 构成互锁控制。
电动机M1 和M2 先后启动,属于自动顺序控制关系。在自动顺序控制中,时间是电动机启动的关键控制点,利用常开触点KT1 的延时闭合,可以延时启动M2,因此将常开触点KT1 接在电动机M2 运行电路中,作为启动的开关。KM3 触点自锁,保障电动机M2 启动并连续运行。电动机M1 的能耗制动是在M2 运行4 秒后,所以将时间继电器KT2(设定时间为4 秒)的线圈和KM3 线圈并联,KM3 线圈得电的同时启动时间继电器KT2。SB7是电动机M2 的停止开关。
能耗制动是防止电动机在切断三相交流电后由于惯性作用继续运行,通过加入直流电产生反向磁矩的做法使得电动机迅速停止。因此,在KM4得电前KM1 要断电,KT2 的常闭触点打开也是M1 断电的条件,它和停止按钮SB1 串联在一起。当KT2 计时一到,KT2 常闭触点会断开,KM1 断电,M1 脱离三相电源。接下来要引入直流电,也就是闭合KM4,将KT2 常开触点作为KM4 线圈得电的条件,时间到,KT2 闭合,开始能耗制动,制动的时间通过时间继电器KT3 来计算。另外,串接在KM4 线圈前面的KT3 常闭触点,可以控制能耗制动过程自动结束。
电动机M2 在M1 完全停止后按停止按钮才能停止运转,因此,将M2 的停止开关和KT3 的延时断开常闭触点并联连接。
2.4 仿真结果分析
按下仿真开关,电路进入仿真状态,闭合空气开关QF,接通电路电源,此时电源线颜色加深,表示有电流流过。仿真步骤如下所述。
(1)按下启动按钮SB2,电动机M1 点亮,图中顺时针箭头表示正转连续运行,同时KT1 线圈开始倒计时,如图3 所示。松开SB2,M1 连续运行,当倒计时为0 时,电动机M2 启动并连续运行,同时启动时间继电器KT2,此时M2 电动机点亮,两台电动机一起运转,如图4 所示。KT2 线圈随M2的启动也开始工作,当KT2 倒计时结束,电动机M1 进入能耗制动,如图5 所示。制动过程结束,M1 停转,M2 还在运行,如图6 所示。M1 停转后,按下M2 的停止按钮SB7,M2 停转。

图3 M1 正转
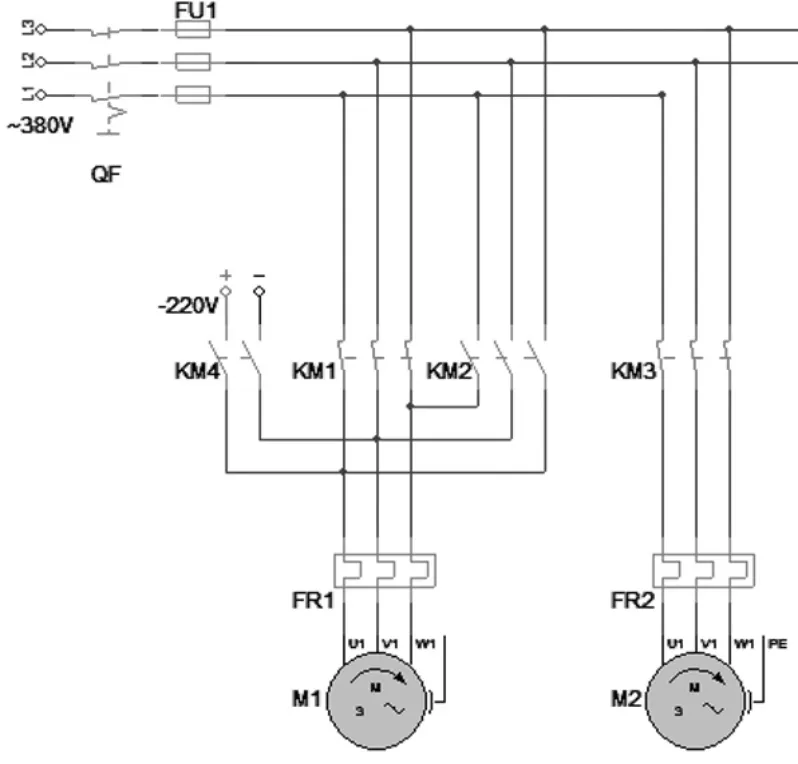
图4 M1 和M2 同时转动

图5 M1 能耗制动

图6 M1 能耗制动结束
(2)按下SB4 可以启动M1 反转,并且自保持,如图7 所示。图中箭头方向由原来的顺时针变为逆时针。M1 的停止用按钮SB1 控制。M1 正转时,KM2 不得电,常闭触点KM2 打开,M1 反转时,KM1 不得电,常闭触点KM1 打开,KM1 和KM2 相互制约。

图7 M1 反转
(3)按下复合开关SB5,实现M1 点动正转,按下复合开关SB6,实现M1 点动反转。M1 点亮状态类似图3 和图7。
(4)模拟电动机过载保护。双击串接M1、M2 的热元件FR1 和FR2,FR1 和FR2 颜色加深,表示电机过载,这时控制电路中的常闭触点FR1 和FR2打开,FR1 和FR2 是串接在M1 和M2 控制电路中的,所以能使电动机断电。过载保护如图8 所示。
经过仿真测试,设计的电路符合控制要求,对实际电机控制系统的接线有一定的参考作用。
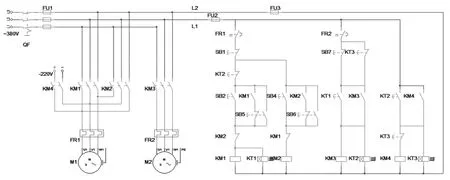
图8 过载保护
3 结语
本文借助CADe SIMU 仿真软件,模拟了两台三相异步电动机运行,仿真的结果符合控制要求。从这个实例不难看出CADe SIMU 仿真软件在电机控制系统学习中的优越性。首先,该仿真软件提供了丰富的元器件库,元器件的符号和国家标准电气图用图符号一致,可以绘制标准的电气控制电路图。其次,支持仿真。平时学生对各种电器接触较少,不熟悉电路的连线及运行过程,这些电路对学生来说即复杂又抽象,而CADe SIMU 软件中的开关、接触器、继电器等电器的工作原理和实物相同,操作相似,仿真结果也非常直观,方便学生理解整个电路的运行。任何电路的设计都会有一定的风险和故障,在动手接线之前进行模拟仿真是非常有必要的,CADe SIMU 的仿真结果对实际电动机电路的设计有一定的参考价值。
