基于AQWA的某大型船舶耐波性响应分析*
2021-03-29黄黎慧侯远杭
黄黎慧 侯远杭
(1.武汉交通职业学院,湖北 武汉 430065; 2.大连海事大学,辽宁 大连 116026)
船舶耐波性是船舶在波浪中运动特性的统称,它包括船舶在波浪中所产生的各种摇荡运动以及这些运动引起的抨击、飞溅、上浪、失速、螺旋桨飞车和波浪弯矩变化等性能,直接影响船舶在风浪作用下维持其正常功能的能力,历来是船舶及其他海洋结构物的设计和使用者十分关心的问题。本设计船为大型军船,耐波性对其作战性能更为至关重要,特别是对飞行甲板上舰载机起降的影响,因此,需要准确地计算出设计船各自由度运动响应幅值并将其控制在合理的范围内。
AQWA软件主要用于计算船舶与海洋工程的水动力性能问题。可以解决浮体在环境载荷作用下的系泊定位、运动响应、海上安装作业、波浪载荷传递以及船舶航行等方面的问题[1]。其拥有以下特点:
(1)可以计算任意水深;
(2)在计算浮体的波浪力时,可以同时考虑波浪的衍射、辐射和浅水效应;
(3)可对浮体结构进行初步设计;
(4)具有时域非线性分析模块;
(5)具有频域线性分析模块;
(6)考虑多个浮体结构通过缆绳连接时,计算浮体结构的平衡位置;
(7)传递压力和速度结果到ANSYS或ASAS进行结构响应分析。
AQWA具备多样化的能力和良好的计算精度,基于AQWA的水动力计算可通过经典AQWA界面或者ANSYS Workbench界面实现,因此,本文将通过AQWA的Workbench界面来对本设计船进行水动力计算。
1 模型的建立
1.1 设计船主要参数
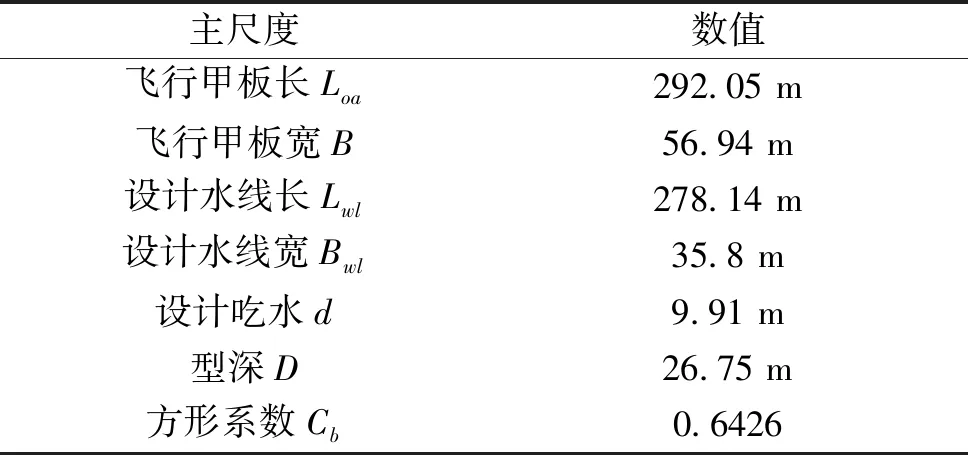
表1 本设计船主尺度信息
1.2 模型的导入
由于本设计船模型已经在Maxsurf中建立,如图1所示。因此,可直接通过igs格式进行模型文件导出,但由于导出的模型不是实体,在Workbench中进行实体化操作较为复杂且容易出现各种错误,文章将导出的igs格式模型文件导入CATIA中,通过CATIA实体化后,再导入Workbench,从而生成设计船的模型。

图1 Maxsurf 中建立的模型
在导入的模型中,通过选择艉封板、甲板封板和船体两侧的外表面,对其进行法线方向的调整,保证法线方向正确。对模型进行船体水线切割,由于模型向Z负向移动,吃水为负数,因此设置吃水为-9.91 m,如图2所示。进行水线切割处理的好处是避免出现跨水线的计算单元,因为跨水线的单元在AQWA中是无法正常计算的[2]。

图2 切割之后的船体模型
2 水动力计算与结果处理
2.1 参数设置
在进行计算前,需要设置全局变量与浮体质量信息、网格设置与划分、水动力计算参数设置以及模型检查。
(1)设置全局变量与浮体质量,包括船体的质量、重心位置、浮体惯性矩等。本设计船的排水量为65263 t,则船体质量设为65263 t;重心位置相对于基线面为12.5725 m,则Z值为2.6625 m;重量分布关于中纵剖面对称,因此,重心横向坐标为0 m,而重心纵向坐标Xg(相对于艉垂线)可以认为和船长成正比,其计算公式[3]如下:
Xg=λL
(1)
式中,λ取自母型船,λ=0.49;L为船体长度;Xg为重心纵向位置坐标。
根据式(1),计算可得Xg为143.962 m。
惯性半径Kxx、Kyy、Kzz可通过经验公式估算,经验公式如下:
Kxx=0.35B
(2)
Kyy=0.25L
(3)
Kzz=0.25L
(4)
根据上式(2)(3)(4),计算可得Kxx=12.53 m、Kyy=73.5 m、Kzz=73.5 m。
将以上数值添加到质量重心参数设置表中,如图3所示。
(2)网格划分。设置网格大小为2 m,生成网格,如图4所示。
(3)水动力计算参数设置(如图5所示)。取15°为一个间隔,共计算23个波浪方向,最小波浪频率f根据经验公式估算[4]:

图3 质量点定义
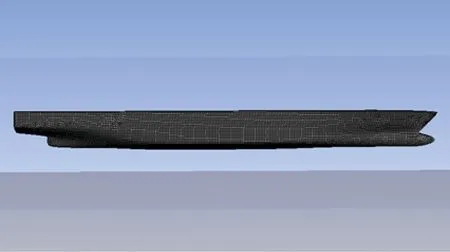
图4 网格划分
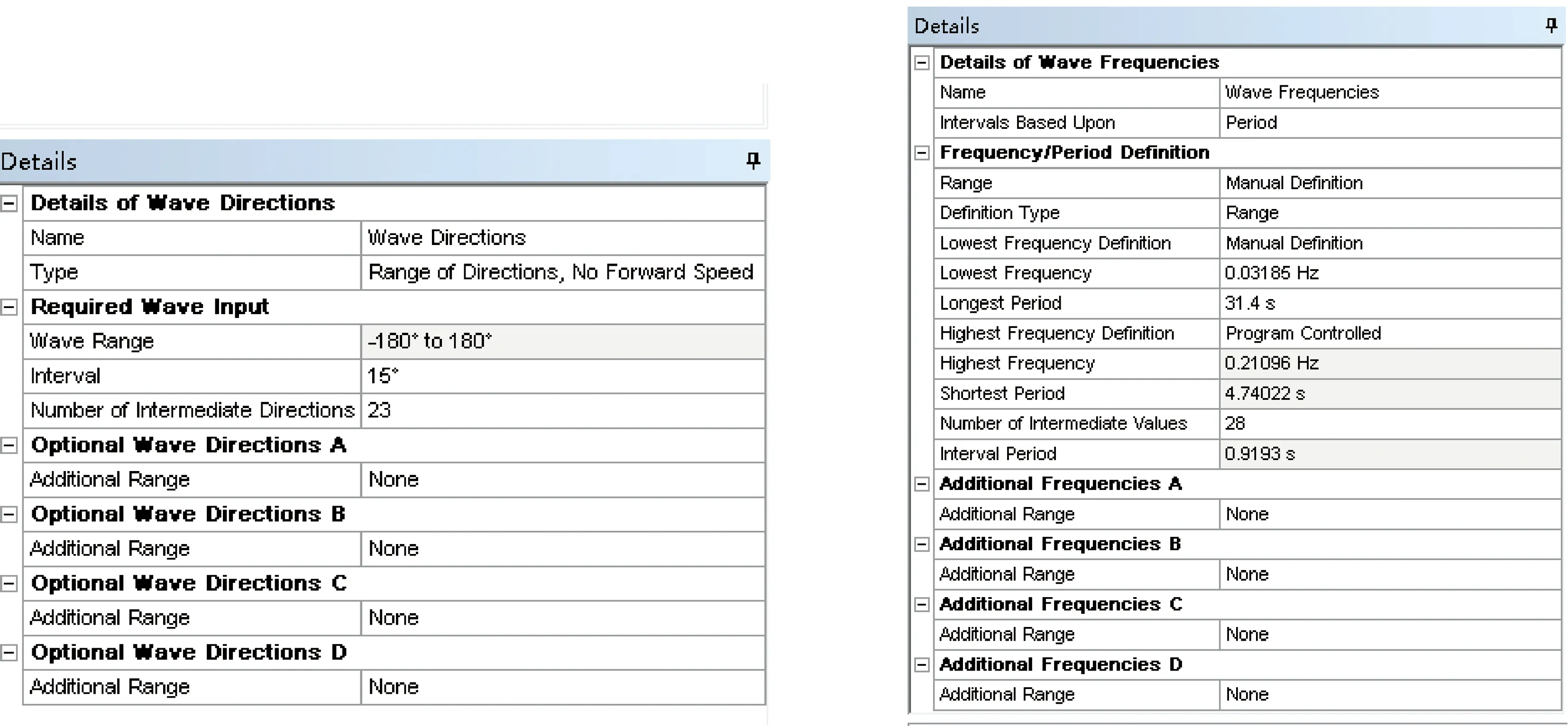
图5 选择计算的波浪方向及波浪周期
(5)
式中,g为重力加速度,d为水深。根据式(5)计算,可得f=0.0175 Hz,周期p=57.1428 s,但AQWA的水动力计算周期涵盖波浪的主要能量范围为5~30 s,而对于常规结构物的浮体,该处可设置为31.4 s。
(4)模型检查。对模型进行静水力计算,将计算结果(如图6所示)与已有的静水力表(表2)做对比,如图6中本设计船的重心坐标Zg=2.662499(相对于水面),与表中计算结果一致;排水体积为63772.805 m3,换算为排水量为65367.125 t,而本设计船的设计排水量为65263 t,两者相差较小;初稳性高GM=3.2324715 m,表中估算的初稳性高为2.8024,两者误差在合理范围内,并且该初稳性高满足本船型初稳性高[5]的范围。由此可知,本设计船的静水力计算结果较为准确,该模型可以用于水动力计算。
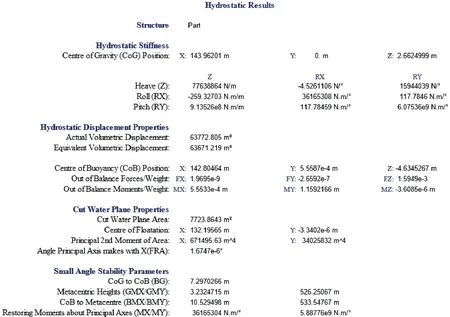
图6 AQWA静水力计算结果
2.2横摇运动结果分析
对模型进行水动力计算,查看90°浪向下的横摇RAO计算结果,如图7所示。
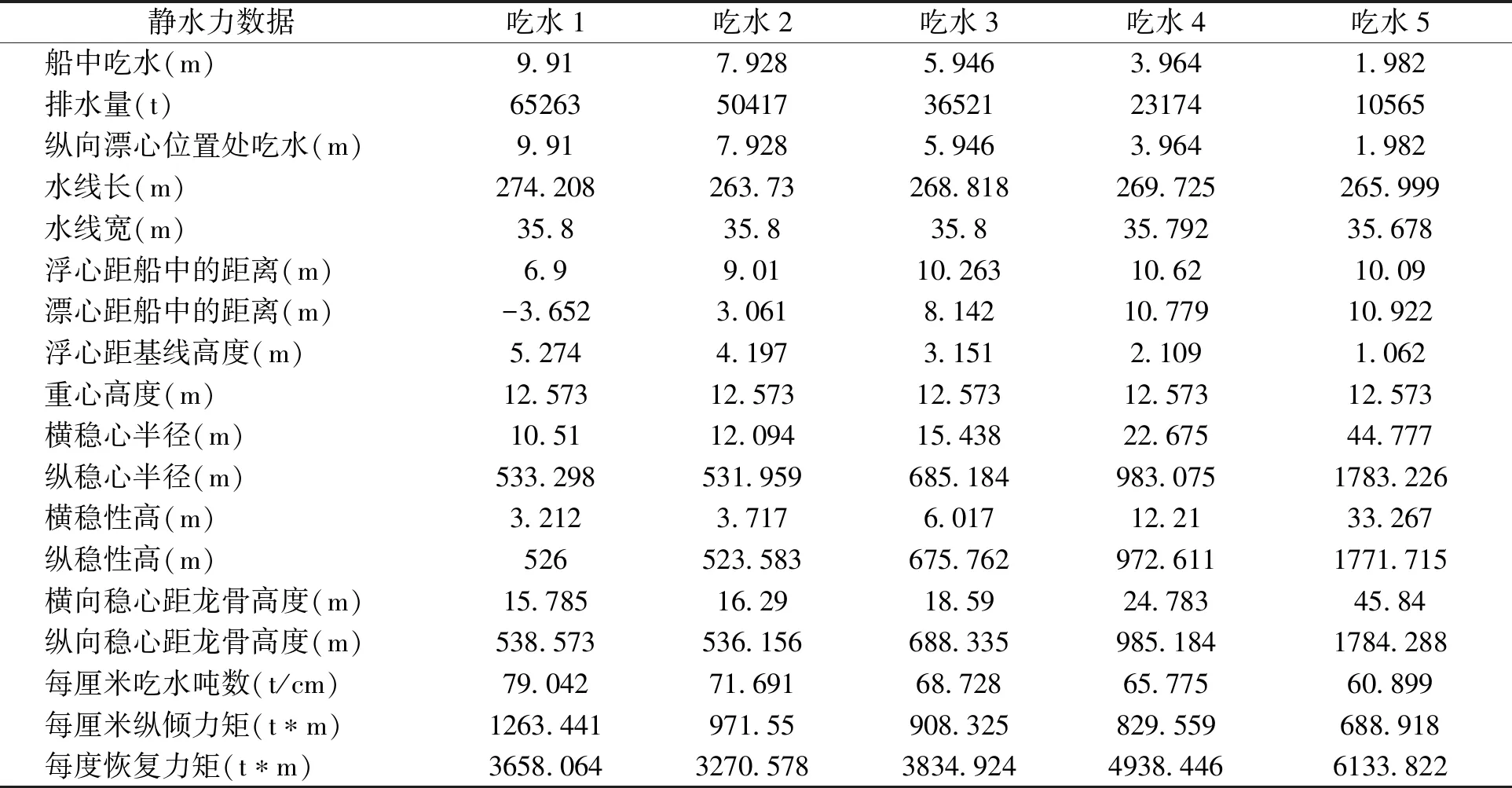
表2 静水力计算表
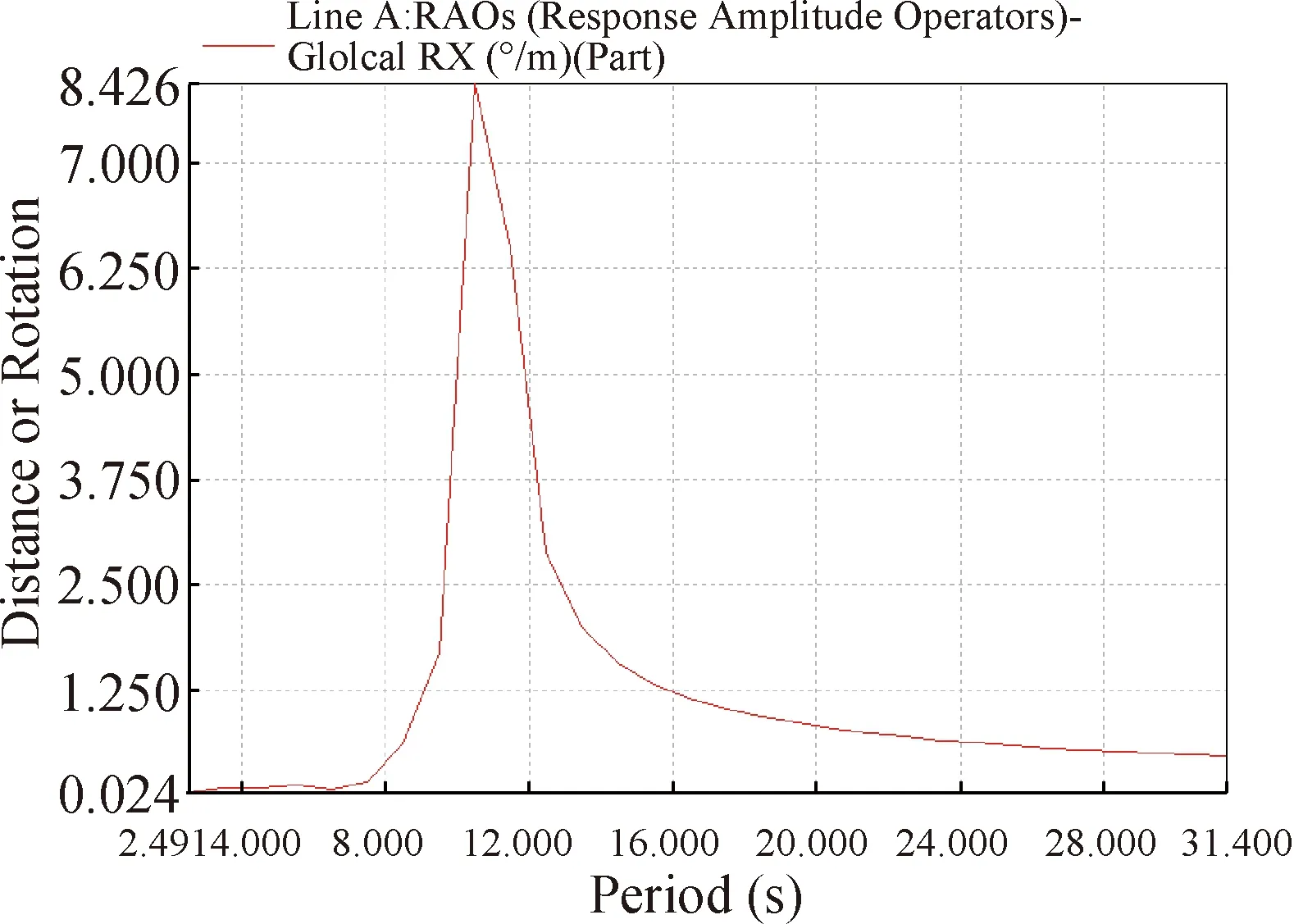
图7 90°浪向作用下的横摇RAO
从图中可发现,90°浪向作用下船体横摇RAO幅值达到了8.426 (°)/m,根据本设计船型部分耐波性要求[6]可知,横摇幅值偏大,需要对船体进行横摇运动方向的黏性阻尼修正。刚体单自由度运动时的临界阻尼[4]为
(6)
式中,Ixx为横摇方向惯性质量,ΔIxx为附加质量惯性质量,KRoll为横摇方向刚度。
本船Ixx=(1.024E+10) kg·m2,KRoll=(3.617E+07) N·m/(°),横摇固有周期取18 s,读取18 s附近的ΔIxx=(4.981E+07) kg·m2,则根据式(6)可得到D=(1.22E+09) kg·m2/s。
经过换算,D=(1.22E+09)×π÷180=(2.128E+07) N·m/(°)/s。而本设计船的飞行甲板上需要起降舰载机,相较于其他种类的船,其对于耐波性的要求更为严格,并且本设计船具有较大的型深,因此,需要加载较大的横摇方向的阻尼才能保证耐波性满足要求,这里将横摇阻尼定为临界阻尼的0.8倍,即(1.7024E+07) N·m/(°)/s。添加阻尼系数,重新进行水动力计算,查看90°波浪作用下的横摇运动RAO结果,如图8所示。可观察到此时的横摇峰值为2.427 (°)/m,位于本设计船型要求的横摇舒适极限和作业极限之间[6],较为合理。
3 给定海况下频域运动分析
3.1 参数设置
在以上水动力计算几何模型和水动力计算结果的基础上,本文对设计船做进一步的分析。设定海况条件参数如表3所示。
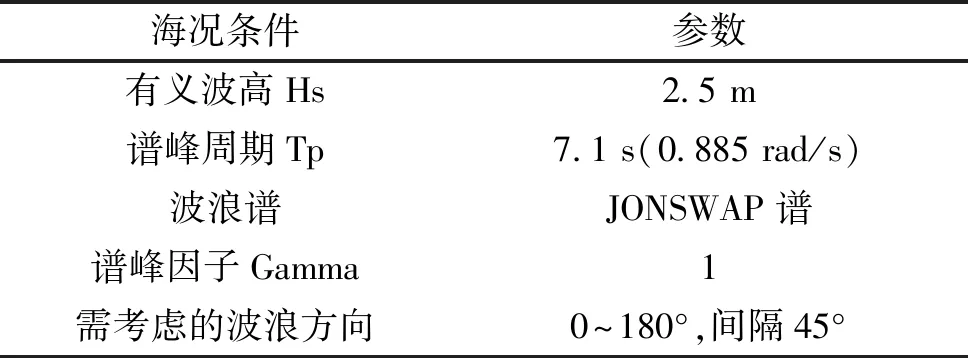
表3 海况条件参数
由于没有系泊系统,无需考虑低频载荷的影响,仅考虑船体在波浪作用下的波频运动,本模型中没有莫里森单元,所以莫里森黏性力线性化设为No。
3.2 频域分析与结果处理
插入不规则波,波浪谱为JONSWAP谱,具体参数如表3所示;将波浪方向设置为0°,45°,90°,135°,180°,分别进行计算,即可得到不同波浪方向下的计算结果。如表4所示。
将计算结果与本设计船作业要求值对比,如表5所示,可知本设计船的重心位置运动响应值在合理范围内。
输出90°波浪谱曲线,如图9所示,与90°浪横摇RAO曲线(图8)对比,可以发现波浪的主要能量范围为0.555~3.75 Hz,而本设计船横摇响应范围为0.032~0.401 Hz,故在给定海况条件下90°浪向下船舶横摇运动较为温和。
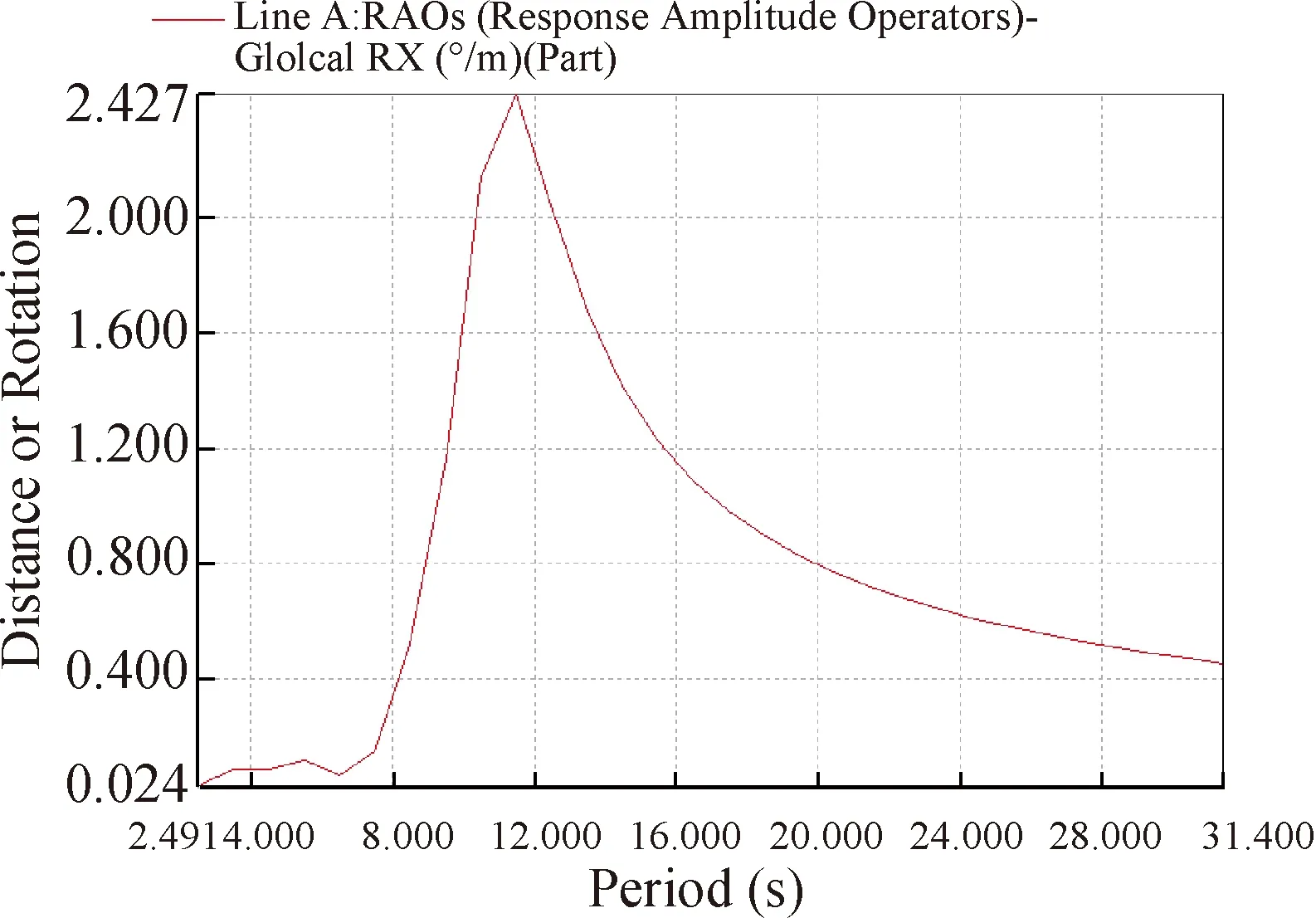
图8 阻尼修正后的90°浪向横摇RAO

表4 给定海况下船体重心运动响应值表a) 给定海况下(0°浪向)船体重心运动响应值

表b) 给定海况下(45°浪向)船体重心运动响应值

表c) 给定海况下(90°浪向)船体重心运动响应值

表d) 给定海况下(135°浪向)船体重心运动响应值

表e) 给定海况下(180°浪向)船体重心运动响应值
4 结语
本文利用AQWA详细地展示了某大型船舶水动力分析的过程及思路,计算结果表明,在给定海况条件下,本设计船耐波性能良好,完全满足飞行甲板上各类舰载机起降作业要求。同时,通过上述分析可以看出,AQWA作为一款成熟的海洋工程水动力分析软件,在进行本船型计算时,具有操作难度低、精度高的优势。在未来的工作中,还可借助AQWA对本设计船进行时域分析和系泊分析,对其靠港停泊进行模拟,分析相关参数,解决其靠港停泊时遇到的各类问题。

表5 本设计船型作业要求值[4]与计算值对比

图9 90°波浪谱曲线