不同工况下电梯紧急制动时轿厢内人员受冲击载荷的实验研究*
2021-03-27
上海市特种设备监督检验技术研究院 上海 200062
0 引言
电梯在紧急情况下,制动器、安全钳、缓冲器等3种不同的安全保护装置分别参与电梯的紧急制动,可能导致轿厢内人员受到伤害,然而这种受伤害程度无法定量测量,极易被公众和媒体误解。媒体各种关于电梯坠落的报道屡见不鲜,例如某写字楼一员工电梯突发事故,电梯坠落时,轿厢内共有12名公司员工。轿厢从27楼开始左右碰撞向下坠落,直到轿厢至12层时再不受任何牵引,直接从12楼落到1楼。经事后调查,电梯发生故障后自动运行至1楼找位置并复位,但让乘客感觉上是电梯在坠落。不同工况下,轿厢内人员采用不同姿势,当电梯紧急制动时,轿厢内的人员到底受到多大冲击载荷,以及以超出缓冲器允许的速度撞击缓冲器时,轿厢内人员将受到多大伤害,项目组利用混III 50 百分位男性假人实验,通过不同工况下电梯紧急制动,采集假人受到冲击载荷,比对各组实验结果来进行研究。
混III 50 百分位男性假人于1976年由通用汽车公司开发,在航空航天、汽车和高铁等领域均有应用,是世界上迄今为止应用范围最为广泛的测试假人。假人在汽车安全领域已经得到广泛应用[1-3],陈卫卫等[4]利用实体假人开展了游乐设施的舒适性和安全性评价,在电梯安全领域,利用假人进行实验研究尚属首次。
1 实验工况
本次实验总共设置了4种不同工况,分别为空载上行制动器制动、满载下行制动器制动、满载下行安全钳制动、满载墩底(即自由落体),制动器、安全钳、缓冲器3种不同的安全保护装置分别参与电梯的紧急制动。其中空载上行制动器制动和满载下行制动器制动工况在真实电梯试验塔实施,满载下行安全钳制动和墩底工况在电梯试验井架上实施。
真实电梯和试验井架模拟电梯基本参数如下:额定起重量1 600 kg,额定速度1 m/s。
假人在轿厢或者平台上分别采用站姿、蹲姿、趴姿等3种不同姿势,轿厢在制动器作用下、平台在安全钳或缓冲器作用下紧急制动。假人内置的传感器分别采集在不同工况下紧急制动,对轿厢内人员危害比较大的颈部、腰部、胸部的受力和受压变形情况(位移)。假人传感器布置位置如图1所示,上颈部力传感器设置在头颅和颈椎连接处,胸部位移传感器设置在胸腔肋骨下,腰椎力传感器设置在腰椎的最后一节。颈部、胸部、腰部传感器配置见表1。

图1 假人传感器布置位置
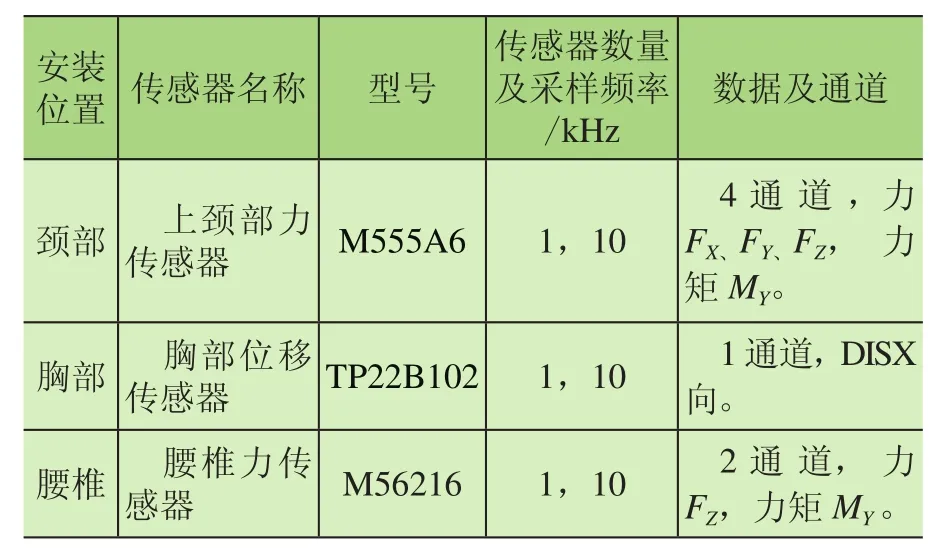
表1 假人的颈部、胸部、腰部传感器配置
1.1 空载上行制动器制动
该实验在电梯试验塔中进行。电梯以额定速度空载上行,在行程上部1/3处断电,制动器动作,电梯紧急制动。假人分别采用站姿、蹲姿、趴姿3种不同姿势,其中站姿和蹲姿采用弹性带固定在轿厢扶手上。通过比较假人关键部位的受力情况,分析不同姿势对人体的影响。空载上行制动器制动工况下,假人站姿、蹲姿、趴姿布置如图2~图4所示。

图2 空载上行制动器制动(站姿)
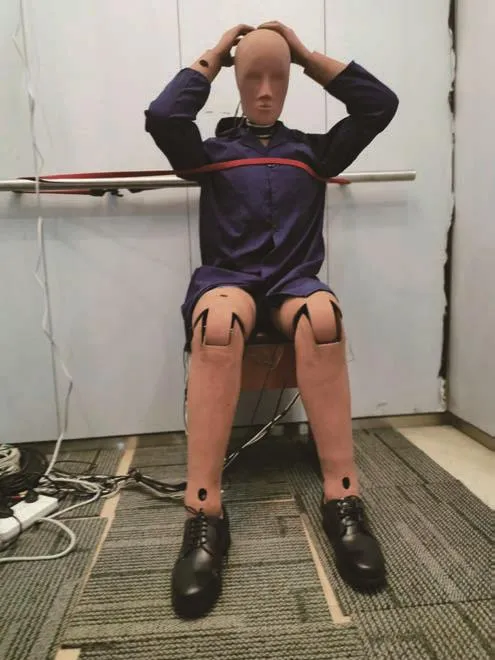
图3 空载上行制动器制动(蹲姿)
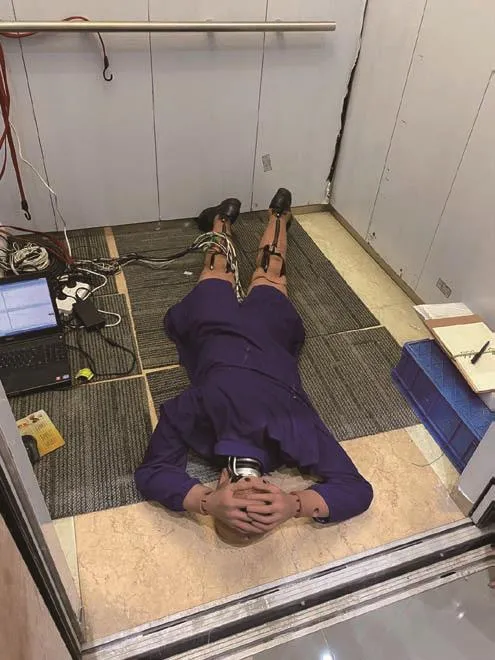
图4 空载上行制动器制动(趴姿)
1.2 满载下行制动器制动
该实验在电梯试验塔中进行。电梯轿厢内均匀放置额定载荷砝码,电梯以额定速度下行,在行程下部1/3处断电,制动器动作,电梯紧急制动。假人采用站姿(考虑到满载情况下,轿厢内人员没有空间采用蹲姿或趴姿),并通过弹性带固定在轿厢扶手上。系统采集假人关键部位的受力数据。满载下行制动器制动工况下,假人站姿布置如图5所示。

图5 满载下行制动器制动(站姿)
1.3 满载下行安全钳制动
该实验在电梯试验井架上进行。模拟电梯在满载下行并触发安全钳动作电梯紧急制动。假人采用站姿,并通过弹性带固定在试验平台框架上。系统采集假人关键部位的受力数据。满载下行安全钳制动工况下,假人站姿布置如图6所示。
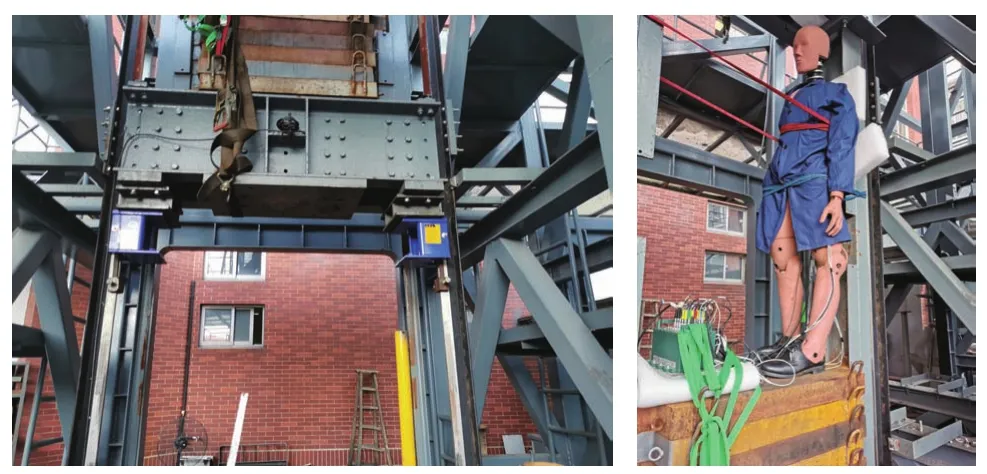
图6 满载下行安全钳制动(站姿)
1.4 满载墩底
该实验在电梯试验井架上进行。模拟电梯分别在缓冲器允许的动作速度范围和超速的情况下,满载轿厢自由落体,并撞击缓冲器。自由落体高度分别为75 mm、500 mm、1 000 mm,其中以75 mm高度自由落体撞击缓冲器,换算到的撞击速度为缓冲器允许的撞击速度。假人采用站姿,并通过弹性带固定在试验平台框架上。系统采集假人关键部位的受力数据。满载墩底工况下,假人站姿布置如图7所示。

图7 不同跌落高度下的满载墩底(站姿)
2 实验结果
2.1 空载上行制动器制动
空载上行制动器制动工况下,设置在假人颈部、胸部、腰部传感器分别采集到受力和受压变形情况(位移),不同姿势的假人颈部、胸部、腰部受力曲线分别见图8~图10。各部位传感器采集到的受力和位移最大值见表2。由此可知,空载上行制动器制动时,不同姿势情况下颈椎受力变化不大;蹲姿情况下胸部肋骨位移最大;趴姿情况下,腰椎受力最小。
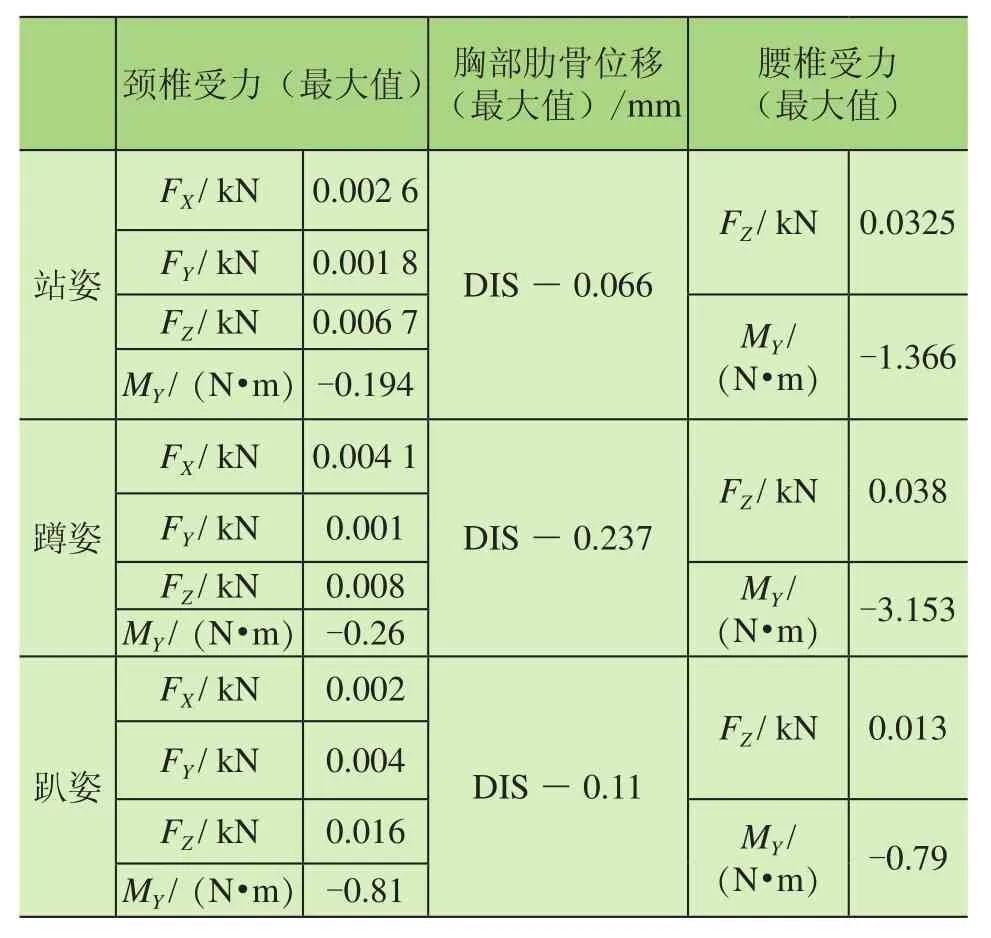
表2 假人数据输出最大值
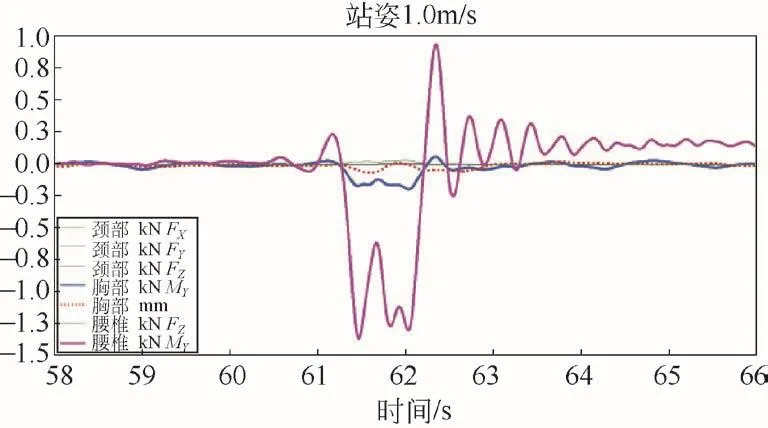
图8 假人数据输出(站姿)
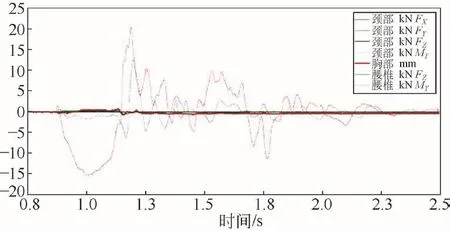
图9 假人数据输出(蹲姿)

图10 假人数据输出(趴姿)
2.2 满载下行制动器制动
满载下行制动器制动工况下,设置在假人颈部、胸部、腰部传感器分别采集到受力和受压变形情况(位移),站姿情况下的假人颈部、胸部、腰部受力曲线如图11所示。各部位传感器采集到的受力和位移最大值见表3。由此可知,满载下行制动器制动时,与空载上行制动器制动站姿情况下相比,颈椎受力和胸部肋骨位移均有所增加;腰椎所受最大力矩明显增加。
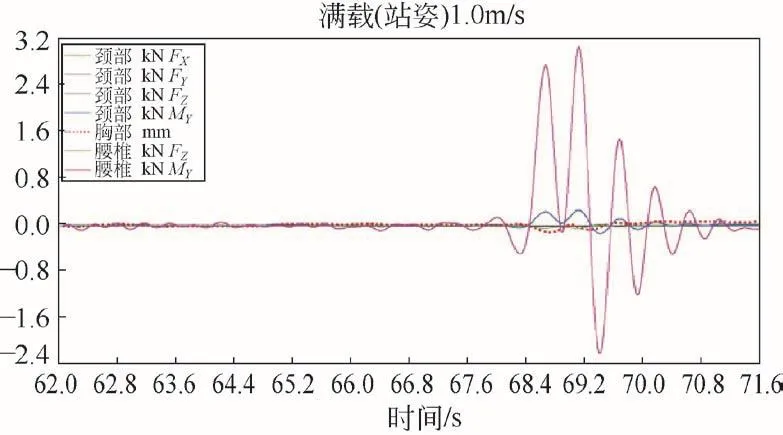
图11 假人数据输出(站姿)
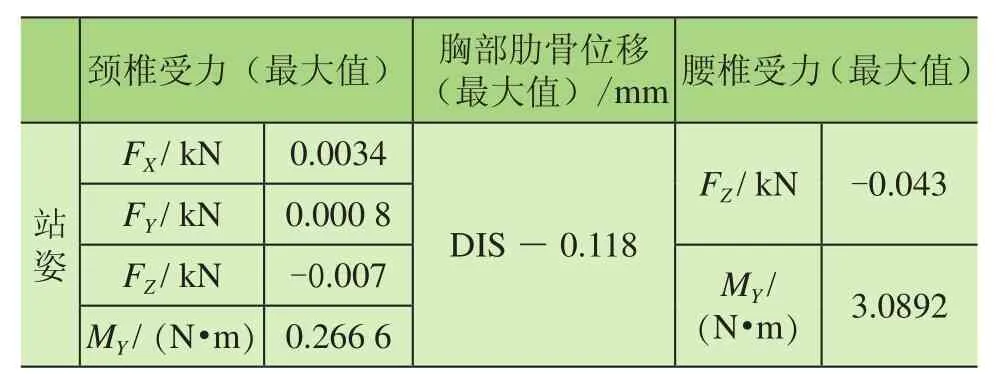
表3 假人数据输出最大值
2.3 满载下行安全钳制动
满载下行安全钳制动工况下,设置在假人颈部、胸部、腰部传感器分别采集到受力和受压变形情况(位移),站姿情况下的假人颈部、胸部、腰部受力曲线如图12所示。各部位传感器采集到的受力和位移最大值见表4。由此可知,满载下行安全钳制动时,与满载下行制动器制动站姿情况下相比,颈椎所受力矩、胸部肋骨位移、腰椎所受力矩均明显增大。
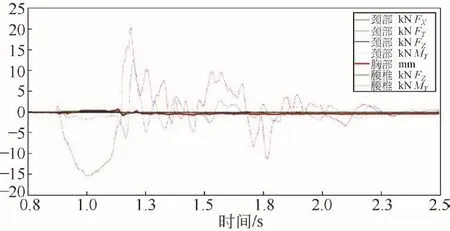
图12 假人数据输出(站姿)
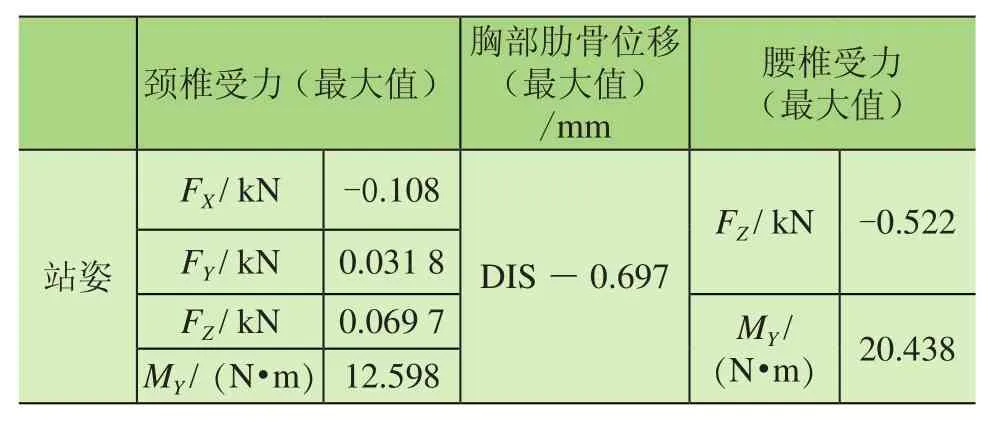
表4 假人数据输出最大值
2.4 满载墩底
满载墩底工况下,设置在假人颈部、胸部、腰部传感器分别采集到受力和受压变形情况(位移),不同自由落体高度站姿情况下的假人颈部、胸部、腰部受力曲线如图13所示。各部位传感器采集到的受力和位移最大值见表5。
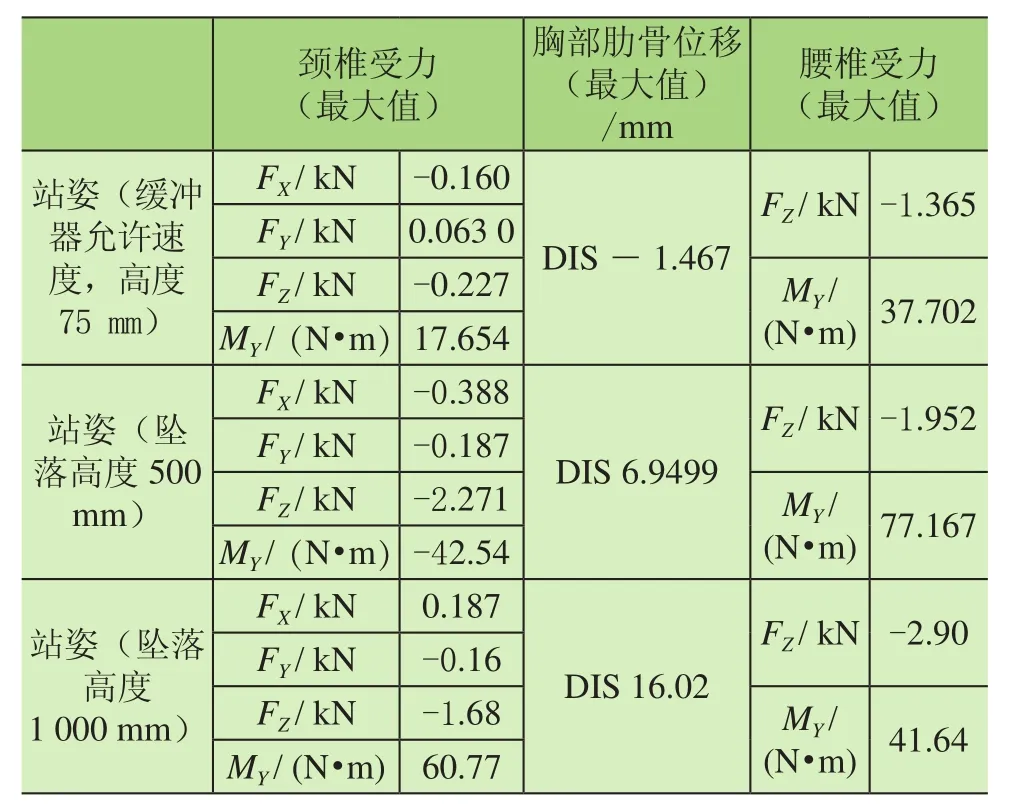
表5 假人数据输出最大值
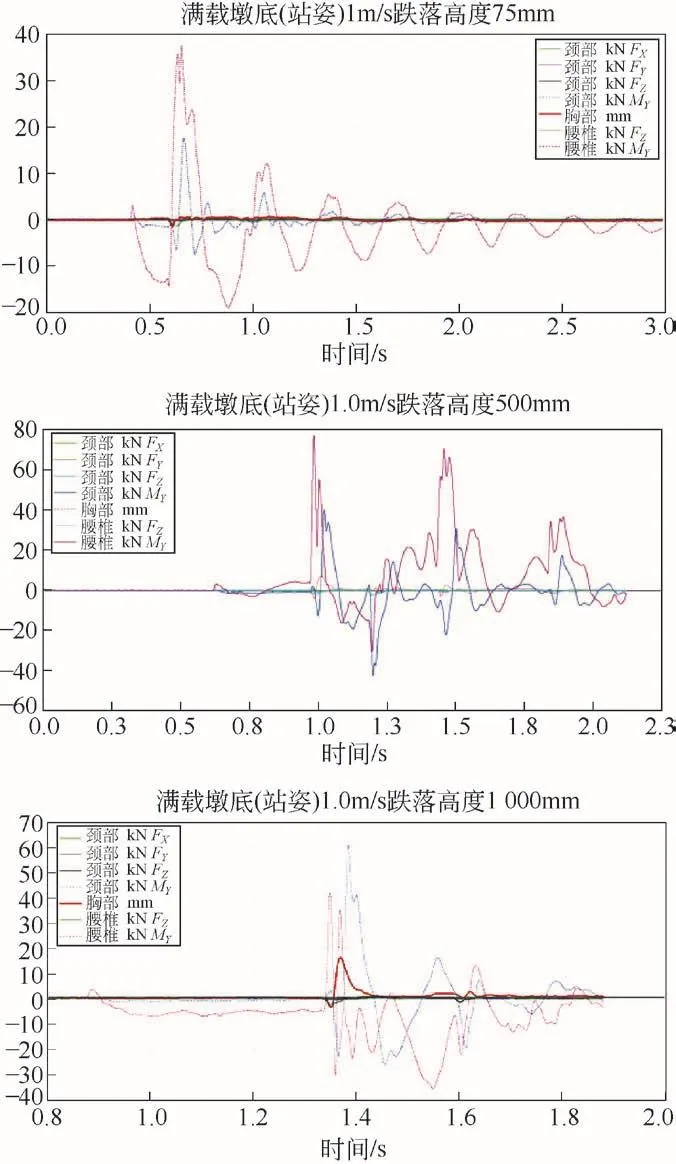
图13 假人数据输出(站姿,不同跌落高度)
由此可知:1)满载墩底时,正常跌落高度(75 mm)下,与满载下行制动器制动和满载下行制动器制动站姿情况下相比,颈椎所受最大力矩值、胸部肋骨最大位移值、腰椎所受最大力矩值均为最大,但均在允许范围内;2)满载墩底时,随着跌落高度的增加,各部分受力和位移均明显增大;3)超出缓冲器允许的动作速度情况下,假人各部分受力和位移均明显增加。现场试验时,明显观察到跌落高度为500 mm时,假人左腿膝盖处骨折,跌落高度增加到1 000 mm时,假人左腿膝盖处断裂。
3 结论
通过空载上行制动器制动、满载下行制动器制动、满载下行安全钳制动、满载墩底四种不同工况下,假人采用不同姿势,其所受冲击载荷的实验比对研究,可得如下结论:
1)在空载上行制动器制动工况下,趴姿较蹲姿和站姿,腰椎的受力最小。
2)站姿情况下,上述四种工况中,满载墩底工况较其他3种工况,颈椎受力、胸部肋骨位移、腰椎受力均最大,因此满载墫底时,人的伤害最大。
3)在满载墩底工况下,若超出缓冲器允许的速度范围,则人将会受到伤害,且伤害程度随着坠落高度的增加而显著增大。
4)上述四种工况下,只要在制动器、安全钳、缓冲器允许的能力范围(包括动作速度和制动载荷)内使电梯紧急制动,则轿厢内人员的受力和受压变形(位移)均在允许值范围内,即人员不会受到伤害。
