适用无人机的小型燃料电池控制方法
2021-03-27向乾张晓辉王正平刘莉
向乾,张晓辉,王正平,刘莉
1. 北京理工大学 宇航学院,北京 100081 2. 北京理工大学 机电学院,北京 100081
燃料电池是一种将化学能直接转化为电能的装置,因其高效率和高能量密度等优点,燃料电池动力系统已经成为中低空电动无人机长航时应用需求背景下最具潜力的动力方案,燃料电池无人机也逐步成为国内外的研究热点[1-7]。无人机飞行过程中,环境温度、气压、氧含量以及湿度动态变化,将影响燃料电池的工作状态,是燃料电池控制必须考虑的问题[8-10]。在燃料电池加载过程中,由于负载动态变化、系统扰动等因素引起的燃料电池温度与膜水含量的变化也会影响其输出性能和使命寿命,所以有效的温度控制与水管理是保证燃料电池高效、高可靠性的关键技术[11-14]。
Hu等[15]认为提高工作温度有助于维持质子交换膜的高离子导电性,从而提高燃料电池输出性能。但过高的工作温度又会导致膜的降解,所以必须将燃料电池工作温度控制在合理值。膜水含量是影响燃料电池性能的重要参数之一,直接决定质子交换膜的离子导电性。膜水含量过低会导致燃料电池性能的衰减,膜电极(Membrane Electrode Assembly, MEA)上液态水太多又会引发水淹故障,对燃料电池产生不可逆的损害,所以必须进行合理的水管理。
目前,已有学者对燃料电池的温度控制与水管理开展了研究,如韩国全南大学的Ou等[16]针对2 kW燃料电池,考虑温度和氢气相对湿度两个控制变量,提出了模糊增量控制方法,通过试验验证了方法的有效性。电子科技大学的谢雨岑等[17]针对10 kW燃料电池,基于变论域模糊增量控制方法开展了温度控制的仿真试验,分析了变论域模糊控制器的作用和有效性;中科院大连物化所的Hao等[18]使用线性扫描伏安法开展试验,讨论了燃料电池水扩散的滞后现象,定量分析了膜的最大水容量。然而以上研究只侧重于燃料电池温度、湿度、膜水含量其中一方面,而整个燃料电池系统的高效健康工作需要同时考虑多个方面。目前为止,尚未见到针对小型无人机配备的小功率燃料电池,同时考虑温度与膜水含量两个变量的控制方法研究。
同时针对燃料电池温度和膜水含量两个状态变量进行控制,提出了前馈型模糊PID (Feedforward Fuzzy PID, FFPID)控制方案与传统模糊PID(Conventional Fuzzy PID, CFPID)和PID对比,以及膜水含量的安时积分门限控制方法。以小型空冷型开放阴极的质子交换膜燃料电池(Proton Exchange Membrane Fuel Cell, PEMFC)为被控对象,建立了电堆温度场动态模型以及膜电极的水平衡模型,确立了直接控制参量,搭建PEMFC测控试验平台,开展PEMFC动态特性试验,验证了所提方法的有效性。
1 电堆温度场与水平衡模型
1.1 电堆温度场动态模型
根据能量守恒定律建立了PEMFC电堆的热力学模型[19-20],总体热模型平衡方程表达为
(1)

电化学反应总功率可以表达为
(2)
式中:ΔH为氢气的燃烧焓;n为电池片数;Ist为电堆电流;F为法拉第常数。
输出功率Pst为电堆电压Vst和电堆电流Ist的乘积,表达式为
Pst=VstIst
(3)
(4)
式中:α为经验系数,代表驱动风扇的PWM波占空比Dfan与空气流速的关系,α与空气密度ρair和无人机飞行高度有关;Ain为风扇横截面积;CP,air为空气比热容;Tamb为环境温度。
环境温度Tamb和空气密度ρair主要受飞机所处地理位置和飞行高度h的影响。
Tamb=f1(lon,lat,h)
(5)
ρair=f2(Pair,Tamb)
(6)
式中:lon为经度;lat为纬度;Pair为空气气压;f1(·)和f2(·)为相应的大气环境函数。

(7)
(8)
式中:Dvalve为阳极排气阀开闭占空比;qH2为氢气平均流量;ρH2为氢气密度;CP,H2为氢气比热容;Tout,H2和Tin,H2分别为阳极排气口和进气口的温度;ton和toff为阳极排气阀开启和关闭时间。

1.2 MEA的水平衡模型
根据质量守恒定律建立了MEA的水平衡模型[18],总体的质量守恒方程表达为
mH2O,cap=mH2O,in+mH2O,gen-mH2O,out
(9)
式中:mH2O,cap为每个排气循环内MEA含水的质量;mH2O,in为每个排气循环内由进气带入PEMFC的水的质量;mH2O,gen为生成水的质量;mH2O,out为排出水的质量。
以两个排气之间的间隔为一个循环,每个排气循环内,进入PEMFC系统的水主要是阴极空气和阳极氢气中带入的水蒸气(假设两种进气都不含液态水),具体表达式为
mH2O,in=mH2O,in,ca+mH2O,in,an
(10)
(11)
(12)
(13)
内部电化学反应生成的水为
(14)
式中:mH2O,in,ca和mH2O,in,an为阴阳极进入系统水蒸气质量;nH2O,in,ca为水的物质的量;MH2O为水的摩尔质量;Vin,ca为阴极进气体积;Ptotal,ca和Ptotal,an为阴阳极进气总压;Rh,in,ca和Rh,in,an为阴阳极进气相对湿度;Psat,ca和Psat,an为阴阳极饱和蒸气压;R为摩尔气体常数;T为水蒸气温度。
对于空冷型开放阴极的PEMFC,阴极气压为空气压力,且随飞行高度h变化,即
(15)
式中:P0为海平面标准气压;T0为海平面气温;β为温度随高度的变化率;g为重力加速度。
PEMFC系统排出的水同时包含阴极的水和阳极的水,其中阴极的水随空气以水蒸气形式排出,阳极的水同时包含气态水和液态水,通过控制阳极排气阀排出,具体表达式为
mH2O,out=mH2O,out,an+mH2O,out,ca
(16)
(17)
mH2O,out,an,liq
(18)
式中:mH2O,out,an,liq为阳极排出的液态水的质量,与阳极排气阀开闭占空比Dvalve呈正相关关系。
将式(10)、式(14)和式(16)代入式(9)即可以计算出留在MEA上水的质量。MEA上水含量过高会引发水淹故障,阻碍气体扩散层和流道上的反应气体到达反应点,催化剂也因水的覆盖降低活性面积,将对电堆产生不可逆的损害[21]。
由MEA的水平衡模型可知,膜水含量与电堆电流Ist、运行时间t、进排气的相对湿度以及阳极排气阀开闭占空比Dvalve有关。为了避免发生水淹故障,结合了电堆电流Ist,对阳极排气阀开闭占空比Dvalve采取调控。
2 温度控制与水管理
2.1 温度控制
温度是影响PEMFC性能最重要的参数之一。温度过高易发生质子交换膜的降解,使PEMFC损毁,低温又会降低PEMFC的输出性能。因此必须控制温度,使得PEMFC以高功率输出,又不至于损坏质子交换膜。本文提出了FFPID控制器与CFPID控制器和PID控制器进行对比。
2.1.1 PID控制器
PID控制器因其结构简单的优点获得了广泛的应用。如图1所示,Tref为燃料电池目标温度,选择PID控制器进行温度控制,表达式为
(19)

图1 PID控制结构Fig.1 PID control structure
2.1.2 CFPID控制器
PEMFC是一个非线性、时变性、强耦合的复杂动态系统,其运行过程存在大量随机干扰[22]。PID控制器难以使PEMFC系统维持在相对稳定的状态,CFPID控制器具有鲁棒性强,不依赖精确模型等优点,适用于PEMFC的热管理。
针对PEMFC的热管理,设计了一种模糊PID控制器,如图2所示。该控制器由模糊增量控制器和PID控制器两者组成,PID控制器对系统产生实际的影响,模糊增量控制器根据误差和误差变化率的反馈对PID控制器进行实时调参。

图2 传统模糊PID控制结构Fig.2 CFPID control structure
首先,对清晰量进行模糊化。根据试验经验和理论分析,确定了该模糊控制器的输入量温度误差和温度误差变化率的模糊论域分别为[-10, 2]和[-4, 4],隶属度函数采用分辨率高的三角型,输出量比例系数kp、积分系数ki及微分系数kd,模糊论域分别为[0, 10]、[0, 4]和[0, 0.3],隶属度函数采用稳定性好的高斯型,以上参数在论域中均被划分为7个模糊子集{vs,s,ls,m,lb,b,vb},具体隶属度函数如图3和图4所示。
其次,建立模糊控制规则。模糊控制规则是

图3 传统模糊PID控制输入量的隶属度函数Fig.3 Input membership function of CFPID


图4 传统模糊PID控制输出量的隶属度函数Fig.4 Output membership function of CFPID
设计模糊控制器的核心。根据控制经验,按照AND-OR逻辑推理,得到49条IF-THEN表达形式的模糊规则,具体的模糊规则表如表1所示。
最后,由模糊控制规则完成模糊推理后,需要将获得的模糊集合转换成能直接用于控制的精确输出量。为了计算方便,解模糊化过程都采用了较为简便且精确度较高的重心法来得到模糊控制器的精确控制量。

表1 传统模糊PID模糊控制规则Table 1 Fuzzy control rules of CFPID
2.1.3 FFPID控制器
虽然CFPID适用于非线性系统的控制,但观察了其控制效果后,发现也不能很好的约束被控变量。为了尽量避免质子交换膜在高温的工作条件下运行,又能保证PEMFC以高性能输出,本文提出了一种FFPID控制。如图5所示,FFPID结构与CFPID相似,区别在模糊控制器部分增加了一个输入量Tref,形成一个前馈环节。
输入量Tref的模糊论域为[43, 47],隶属度函数结构采用三角型,在论域中被划分为3个模糊子集{l, m, h},其余的输入量和输出量的隶属度函数与CFPID控制器一致,具体的隶属度函数如图6和图7所示。根据控制过程经验[23-24],按照AND-OR的逻辑,得到了具有if-then表达形式的模糊规则,建立了模糊规则表,如表2所示。当目标温度为“高(h)”,温差为“极大(vb)”,温度变化率为“极大(vb)”时,此时PEMFC处于大功率输出状态,产热量大,温度升高较快,需要快速降温,避免温度过高,所以设定比例系数为“大(b)”,积分系数为“极大(vb)”,在该状态下温度易发生振荡,所以设定微分系数为“略大(lb)”,以改善动态特性;当目标温度为“低(l)”,温差为“中(m)”,温度变化率也为“中(m)”时,此时PEMFC的产热低,温度趋稳,风扇不需要大幅调整,所以设定比例系数为“略小(ls)”,积分系数为“小(s)”,为了避免受噪声干扰,将微分系数设为“略小(ls)”。

图5 前馈型模糊PID控制结构Fig.5 FFPID control structure


图6 前馈型模糊PID控制输入量的隶属度函数Fig.6 Input membership function of FFPID
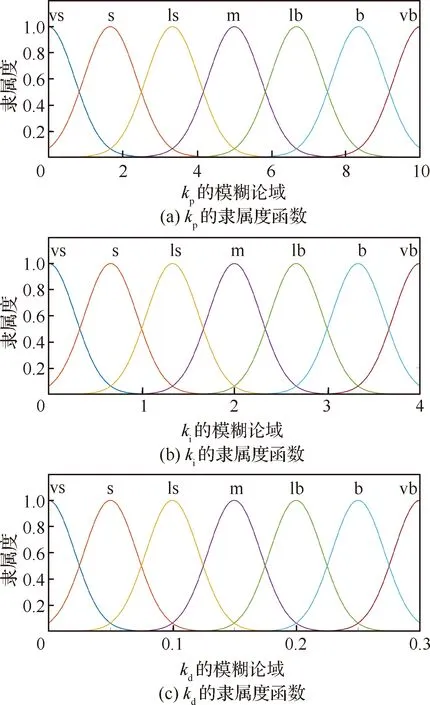
图7 前馈型模糊PID控制输出量的隶属度函数Fig.7 Output membership function of FFPID
2.2 水管理

在此基础上,设计了定时排水和安时积分门限排水两种方法。

表2 前馈型模糊PID模糊控制规则表Table 2 Fuzzy control rules of FFPID
2.2.1 定时排水方法
定时排水方法主要考虑到水的生成是一个积累过程,以固定的时间间隔15 s打开阳极排气阀,开启0.25 s排水排气,然后关闭排水阀,这样可以达到排除MEA上多余水分的目的。
但在试验过程中,定时排水方法存在一定的不足,因为PEMFC运行初期MEA上膜水含量并不多,所以无需频繁地打开阳极排气阀。
2.2.2 安时积分门限排水方法

表3 安时积分门限控制策略Table 3 Ampere-hour integral threshold control policy
3 燃料电池系统控制试验
3.1 试验系统建立
PEMFC试验系统如图8所示,该系统由燃料电池堆、氢气瓶、流量计、阳极排气阀、电流电压传感器、风扇、电子负载、FC控制器及上位机组成,FC控制器为STM32开发板,其中燃料电池堆的PEMFC运行过程中,风扇驱动冷空气不断地流过电池堆,PEMFC控制器将电堆温度保持在设定值。阳极排气阀开启使氢气排到环境中,同时带走聚集在阳极上的液态水。
认为PEMFC的最佳运行温度与电堆电流Ist有关[20],具体关系为
Tref=aIst+b
(20)
式中:a和b为经验参数,取a为1,b为40,由生产厂家提供。
试验中,室内环境温度为25 ℃,空气湿度为30%,电子负载给PEMFC定电流加载如图9所示的电流剖面。在加载初期,每增加1 A持续50 s 的阶梯式加载,达到7 A后再逐步减小电流,这样的设计考虑了PEMFC的健康工作条件。K型热电偶和电流电压传感器实时地将电堆温度Tst和电堆电流Ist反馈给嵌入控制算法的STM32开发板,STM32开发板计算出驱动风扇PWM波的占空比Dfan和阳极排气阀开闭占空比Dvalve,由风扇执行散热,阳极排气阀执行排气排水。流量计实时测量进气流量,并通过STM32开发板的串口将数据发送至上位机保存。试验之前必须对PEMFC系统采取静置4 h处理,以尽量减弱上一次试验产生的余温和水对本次试验的影响。

表4 燃料电池基本参数Table 4 Basic parameters of fuel cell
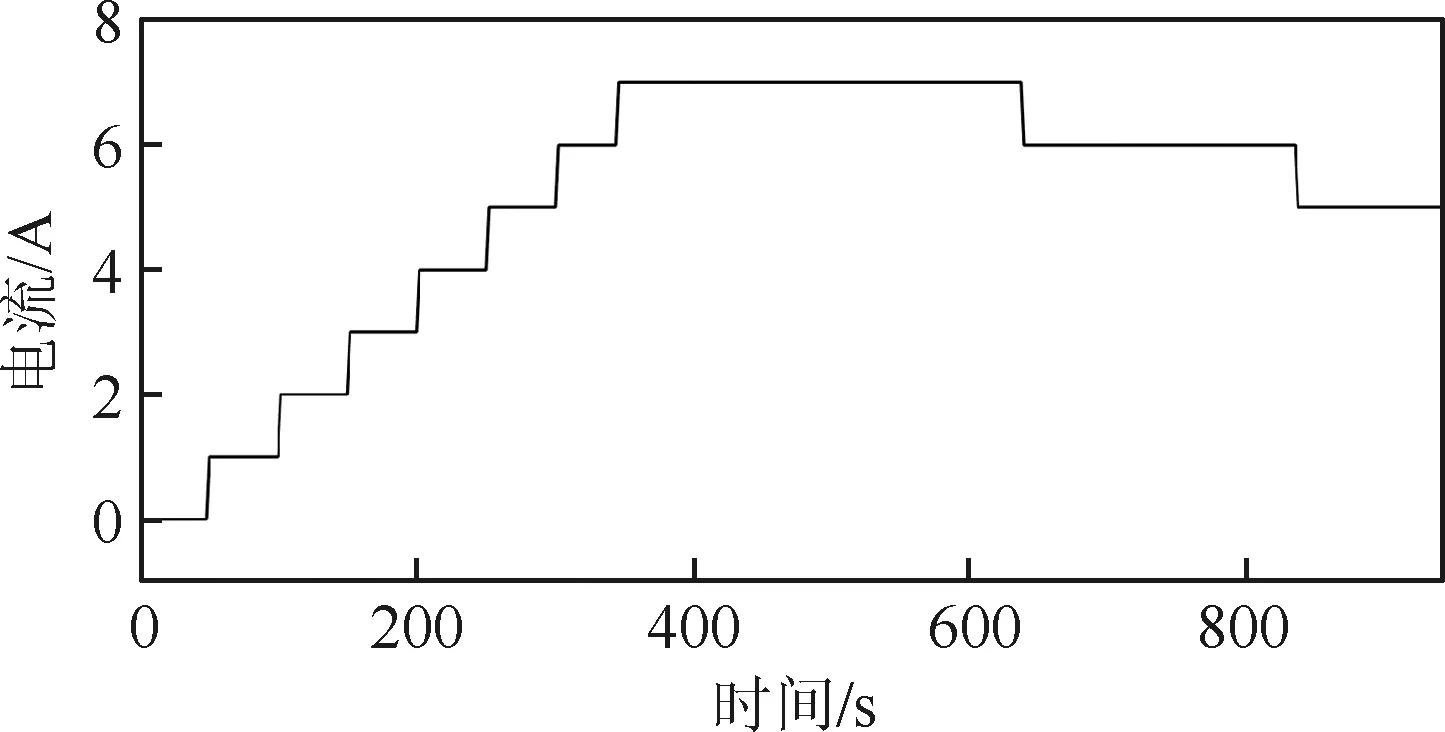
图9 电流剖面Fig.9 Current profile
3.2 试验结果
3.2.1 温度控制
针对提出的前馈型模糊PID、传统模糊PID和PID控制方法开展了对比试验,试验结果如图10所示。其中图10(a)是温度控制试验的整体结果,可见由于启动过程产热量较小,需要一个热量积累过程才能达到目标温度,3种方法基本都能实现产热量较高时的温度控制,能够维持大功率时的温度稳定,防止了质子交换膜的高温降解。
图10(b)为PEMFC启动过程温度控制的局部放大图,可见前馈型模糊PID相比PID方法减少了7%的调节时间,与传统模糊PID相当,具体调节时间如表5所示。而3种控制方法的超调量差异不大,稳态误差基本一致。
图10(c)为目标温度从47 ℃下调至46 ℃的控制过程局部放大图,此时PEMFC功率依然较大,产热速率较快,虽然3种控制方法温度起点不一致,但三者的控制效果没有明显差异,都能够稳定地跟踪目标温度的变化。
图10(d)为目标温度从46 ℃下调至45 ℃的控制过程局部放大图,此时PEMFC功率进一步降低,产热速率减小,前馈型模糊PID方法相比其他两种方法调节时间优势不大,但对超调量的抑制优势明显,3种方法的超调量如表5所示,前馈型模糊PID的超调量仅为PID方法的34%,为传统模糊PID方法的43%。3种方法下的电堆温度都在目标温度以下,该现象是由于电堆产热速率减小所致。相比之下,所提前馈型模糊PID能够感知PEMFC产热速率的变化,提前调整自身的控制量,避免造成过大超调。
综上,PEMFC电流逐渐增大的启动过程,需要较长时间的热量积累过程,所提前馈型模糊PID方法能够较快地达到目标温度;PEMFC大电流运行时,3种控制方法基本都能实现PEMFC温度控制,避免电堆温度持续升高,保护质子交换膜不受高温影响发生降解;在PEMFC电流持续减小时,燃料电堆产热速率随之降低,所提前馈型模糊PID能够有效地感知产热速率的变化,对超调量的抑制效果具有明显优势,能够使PEMFC工作温度贴近最佳工作温度,既提高了PEMFC性能,又兼顾了健康使用条件。

表5 3种控制方法温度控制过程中的动态特性指标
3.2.2 水管理
针对提出的安时积分门限排水方法与定时排水方法开展了一系列对比试验,试验结果如图11所示。2次试验都基于相同的前馈型模糊PID温控方法,采用所设计的两种水管理方法。青色曲线为按照相同时间间隔排水的定时排水方法,红色曲线为安时积分门限排水方法。在PEMFC运行初期,安时积分门限排水方法控制下的PEMFC电堆温度始终略高于定时排水方法,这有助于PEMFC快速追踪目标温度,使PEMFC以更快的速度达到正常工作状态。在整个试验周期内,安时积分门限排水方法使PEMFC的平均电堆温度提高了0.3 ℃,其主要原因是定时排水方法比安时积分门限排水方法多排出了3 L氢气,占定时排水方法排出氢气的15%,如表6所示。
这部分氢气在电堆内吸收了热量,没有参加电化学反应就被排出,直接造成了电堆的热量损失和氢耗量上升。温度的提升会直接影响输出性能,如图12所示,采用安时积分门限排水方法的输出电压在启动初期有所提升,后期逐渐平稳,总体来看,两条电压曲线区别不大,对输出性能提升贡献有限。整个运行阶段,未发生电压骤减、输出性能下降等现象,证明两种排水方案都能有效避免水淹故障发生。

图11 水管理对温度的影响Fig.11 Impact of water management on temperature
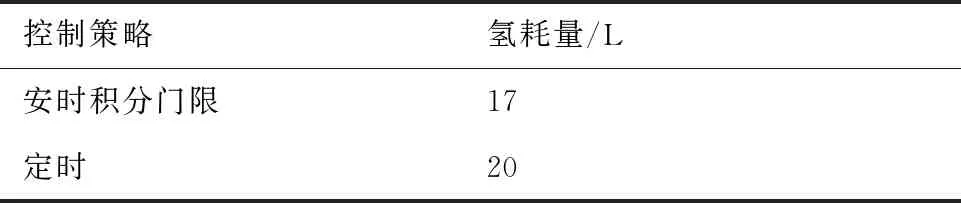
表6 2种排水方案的氢耗量比较
综上可知,安时积分门限排水方法既减少了氢耗量,提高了燃料经济性,又兼顾了电堆健康使用条件,还提升了启动初期的输出电压,但对全时段的输出性能提升有限。所以在PEMFC面临冷启动时,适当地减少阳极排气阀的开启频率有助于快速提高性能。

图12 水管理对输出性能的影响Fig.12 Impact of water management on output performance
4 结 论
1) 3种温度控制方法都能防止PEMFC温度过高,保证PEMFC处于健康的工作状态。所提的FFPID控制方法能够感知到目标温度的变化,及时调整自身参数,以适应PEMFC在不同工况下的产热速率,将温度控制在目标值。与之对比的CFPID与PID控制方法,在PEMFC处于产热速率低的小电流工况下,更易发生明显的超调现象,使电堆温度过低,难以在短时间内跟踪上目标值,造成输出性能下降。
2) 2种排水方案都能及时排出多余的水分,避免PEMFC发生水淹。但在PEMFC启动初期,阳极MEA上还未产生液态水聚集,定时排水方法过多的开启阳极排气阀门,没有起到排水的作用,反而导致热量随氢气排出,既损失了热量,又浪费了氢气。提出的安时积分门限排水方法,减少了PEMFC启动初期多余的排气动作,可使电堆温度快速升高,以尽快地进入高效工作状态,相比定时排水方法减少了15%氢耗量,提高了燃料经济性,有利于PEMFC无人机长航时需求。
3) PEMFC电堆升温控制的前提是自身的产热量高于散热量,否则电堆温度就会持续下降,无法稳定在目标值。无人机应用背景下,高空高度增加环境温度降低,将加大电堆与环境之间的热交换,若要将电堆温度控制在较高值,单靠电堆自身产热已不现实,所以必须为电堆提供外部增温系统,提高局部环境温度,减少散热,补偿环境低温导致的热量损失。另一方面,为了进一步减少排气过程的氢耗量,以增加无人机航时,可以深入研究水在MEA中的扩散情况,建立更精准的水平衡模型,设计更高效节能的排水方案,以减少阳极排气阀的排放,节省氢气。
