入射角对VZ-400激光点云测量精度的影响
2021-03-26童魁
童 魁
(1.中铁第四勘察设计院集团有限公司,湖北 武汉 430063)
随着点云测量精度的提高,地面三维激光扫描系统在滑坡体、建筑物以及隧道等结构中的监测应用深度日益增加[1-2],但其在工程应用过程中,将产生诸多方面的误差。瑞士联邦技术大学的Zogg博士将地面三维激光扫描系统的误差源分为激光扫描仪本身、反射目标和环境条件3类[3]。激光扫描仪作为系统的主体,测量过程的测距、测角、激光束、轴系等均会引入误差,该类误差一部分可通过仪器检校予以消除,另一部分则需通过误差理论知识予以评定。大气环境作为误差源的主要原因为:三维激光扫描仪在测量过程中,由于温度、气压、大气灰尘、障碍物等的影响,导致测量精度的损失。大气折光造成的误差可通过人为改正,其余部分误差可通过选择合适的测量时机和测量环境予以减小。反射目标是最主要的误差源,由于其大小、反射率、颜色和材料属性等的不同,影响了激光束的反射强度和角度,进而影响测量点位的精度。同时,较高的反射目标将引起高入射角测量,导致激光光斑发散变形,对点云测量精度有较大影响[4]。本文旨在针对VZ-400扫描仪设计测量方案,探究入射角对其点云测量精度的影响。
1 考虑入射角的光斑大小模型
地面三维激光扫描仪在实际工作过程中,往往因距离被测目标过近或被测目标高度过高而导致激光光束达到截止高度角。此时,入射激光光斑的直径将随着测距范围的增加而增加;且高入射角还将导致激光光斑从圆形变成椭圆形。根据目前国外学者的研究成果[5-6],椭圆光斑长轴长度随入射角变化的公式为:

式中,β为激光波束宽度;S为扫描距离;α为入射角;Sβ为光斑的直径。
当入射角为零时,则光斑直径等于D,那么任意入射角下的椭圆形光斑长轴的计算公式为:

假设正常入射角范围的入射光斑直径为D,当入射角达到80°时,光斑的长轴将变成D/cosα≈6D。这种变形使得激光点可能落在光斑的任何一处,从而增加了不确定性,损失了点位的精度[7]。
VZ-400扫描仪的水平角度扫描范围为0°~360°,垂直角度扫描范围为60°~-40°;在天顶方向的截止高度角为60°,本文据此设计实验,以探测入射角对点云测量精度的影响。
2 测量方案设计
本文选取高度约为70 m、宽度约为10 m的建筑物表面作为待测目标,并在待测目标周围布置4个平面靶标。本文利用VZ-400扫描仪,以1 cm的采样间隔扫描待测目标,以1 mm的采样间隔扫描靶标,分别在距离待测目标42 m、52 m、62 m、72 m、82 m、92 m、102 m、120 m和135 m处设站完成待测目标和靶标的扫描工作,得到9组点云数据。这9组点云数据,除入射角不同外,点云采样率、测量目标和测量环境均相同,测量现场如图1所示。
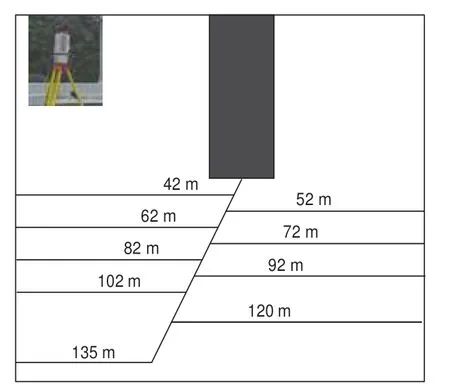
图1 扫描现场示意图
3 数据获取与处理
3.1 点云数据预处理
地面三维激光扫描仪采集的数据含有大量的噪声,因此需对点云数据进行预处理。本文在RiSCAN PRO软件中,利用噪声剔除工具删除噪声点。
3.2 点云数据配准
本文利用同名点配准的方法完成点云配准工作,首先利用RiSCAN PRO软件提取9组标靶的中心坐标;再以D=135 m处的点云坐标系为参考坐标系,通过不同组间4个固定平面靶标所提取的坐标建立转换参数;最后将另外8组点云数据坐标系转换至参考坐标系,完成点云数据配准工作。
3.3 点云数据提取与处理
为了更加显著地体现入射角所引起的变形,本文利用RiSCAN PRO软件,将被测目标高度在60~70 m范围外的点云数据剔除,仅保留目标高度在60~70 m范围内的点云数据。由于被测目标高度一致,因此D=135 m处的点云入射角最小。本文基于以其采集的60~70 m范围内的点云数据,运用最小二乘法求取参考平面方程;再通过点到平面的距离公式,求取其他测站采集的60~70 m范围内的点云坐标到参考平面的距离。
点到参考平面的距离与点云所在高度的关系如图2所示,可以看出,当测量距离较近、入射角较大时,点云中的测量噪声十分明显,该类噪声是由激光光斑扩散引起的。

图2 不同测量距离处的点到参考平面的距离
根据激光光斑扩散的线性模型,对于任何测量距离处的点云数据,其都满足di(z)=i+ciz,z和i分别表示被测目标上的点和扫描仪到地面的高度。由于仪器高相对于被测目标高可忽略不计,因此i≈0,则本文以高度为65 m处的点云到参考平面的距离为例,求取ci,并做出ci和di/z(65)的散点图;再通过多项式拟合,建立曲线方程,如图3所示。

图3 入射角系数与d/h的函数图像
首先计算Dscan/Ztop,再通过拟合得到的函数关系、求出ci,最后将其与被测目标高Ztop相乘,便可得到入射角引起的误差。VZ-400扫描仪的截止高度角为60°,因此(d/z)min≈0.6。根据图3中建立的函数关系,VZ-400扫描仪的入射角系数与d/h的对应关系如表1所示。

表1 VZ-400扫描仪入射角误差系数统计表
3.4 工程应用
利用VZ-400扫描仪对某既有铁路线附近建筑物侧面进行3期扫描工作,扫描结束后通过RiSCAN PRO软件对点云数据进行预处理、数据配准和滤波工作。首先利用最小二乘法对第一期点云数据进行平面拟合,并计算第三期点云到该平面的距离,得到变形矢量(x,y,z,d);然后在拟合平面上对变形矢量进行投影,可得到U和V坐标,经过投影后变形矢量为(u,v,d);最后将变形矢量(u,v,d)投影在U、V方向上,可得到其坐标分量变形结果,如图4所示。
本次工程实例的被测目标高约为65 m,测站与被测目标的水平距离约为110 m,由表1可知,入射角引起的误差为3.6 mm;由图4b可知,相较于第一期监测结果,第三期监测结果在U方向上没有变形,在V方向上存在最大约为16 mm的变形,排除入射角引起的误差,其在V方向存在变形。

图4 第三期坐标分量变形结果
4 结 语
根据本文分析可知,随着入射角的增大,VZ-400扫描仪所引起的点云误差也将增大。在变形监测应用领域,可通过查询其入射角误差系数表,计算入射角所引起的误差,以判断其是否存在真实变形。同时,针对特定高度的监测目标,设计最优的扫描距离,可提高点云测量精度,从而提高监测结果的准确性。
