基于改进DOG边缘检测算子的铁鞋相对位移检测*
2021-03-26钱荣威马增强许丹丹
钱荣威,马增强,2,许丹丹,周 涵
(1. 石家庄铁道大学电气与电子工程学院,石家庄 050043;2. 石家庄铁道大学省部共建交通工程结构力学行为与系统安全国家重点实验室,石家庄 050043)
0 引言
铁路车辆溜逸事故是铁路中较为常见的一种安全事故,是铁路运输生产中暗藏的“隐形杀手”。所谓溜逸事故是指停留在线路上的机车车辆,由于没采取止轮措施或止轮措施不当,导致车辆的自然移动。为了避免车辆产生溜逸,减轻人员伤亡和财产损失,现场作业人员常在防溜作业中使用防溜铁鞋[1]。通常是将防溜铁鞋放置于车轮底下,利用防溜铁鞋的踏面阻力作用阻止车辆移动[2]。防溜铁鞋通常采用铸钢材质制成,具有坚固耐用、体积小、便携等特点,目前广泛应用于铁路各车站和编组站[3]。停车后是否正确防溜,铁鞋的放置位置是关键,而铁鞋是否全部取出关系到列车是否可以安全发车。目前,铁鞋的防溜作业都是人工完成的,由于现场工作人员紧张,没有专职铁路防溜作业人员,极易造成铁鞋漏放、漏撤等安全隐患。
我国的智能铁鞋研究从理论到实践经历多年摸索。主要有3种方法:①将机械闭锁加入到铁鞋上[4-5];②将远距离通讯终端与传感器相结合[6];③运用无线通信技术、单片机和高科技检测技术相结合的方法[7]。根据对已有铁鞋的探究,最初从铁鞋本体的机械设计问题出发,逐渐成为铁鞋与传感技术、无线通信等技术的结合,并且使高新技术逐渐应用到铁路设施中,契合新时期下铁路现代化发展的大方向[8]。但是现阶段受技术的制约,这3种方法并没有实现经济性和实用性的完美结合,因此需要进一步从技术应用、经济实用着手进行改进。
近年来,计算机视觉[9-10]的快速发展为铁鞋相对位移检测提供了新的思路。本文采用视觉传感器与图像处理相结合的方法来实现铁鞋相对位移检测,并针对传统DOG边缘检测算子无法细化边缘的缺点[11],提出了一种改进的DOG边缘检测算法得到较为准确且细化的铁鞋边缘,从而实现特征点的准确提有利于铁鞋与车轮之间相对位移的检测。本文方法将相机安装在车轮旁侧的油箱上,首先对铁鞋图像进行预处理,其次采用改进的DOG边缘检测算子获得铁鞋轮廓,对铁鞋轮廓进行特征点提取得到铁鞋尾部特征点,最后结合相机标定得到铁鞋与车轮的相对位移。实验结果表明,该方法实现了列车铁鞋与车轮之间相对位移的非接触检测,且误差在1%以内。
1 铁鞋位置检测方案原理
通过图像处理不仅可以直观地得到铁鞋的放置位置,而且具有在线测量、非接触、精度高、成本低等优点。图1为铁路铁鞋的使用示意图,单目相机安装在车轮旁侧的油箱上,保证拍摄区域将铁鞋纳入其中并确保鞋尾与相机视野下边缘平行,以通过定位鞋尾的位置确定其空间位置。
相机一经标定其像素距离参数便是确定的。机车铁鞋有其固定的规格[2],故其长度也是确定的。首先在相机视野中标记下边缘,得到下边缘距车轮

(a) 轨道放置铁鞋 (b) 铁鞋置于鞋架上
中心的实际距离L,其次采用图像处理算法得到鞋尾距标记点的实际距离L1,最后得到铁鞋与车轮相对位移Lx,原理如图2所示。
Lx=L-L1-L0
(1)
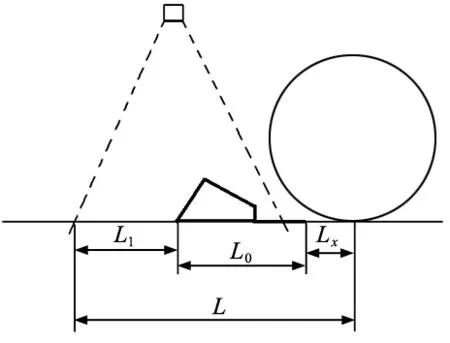
图2 计算原理示意图
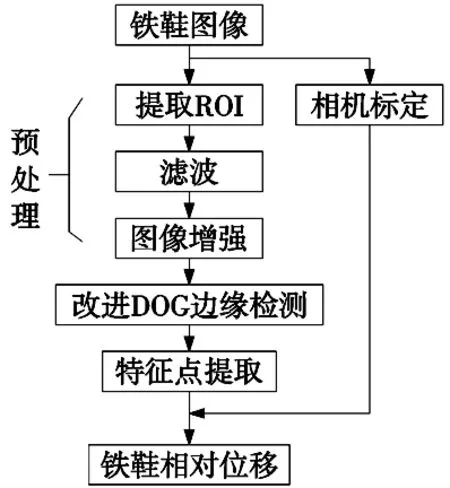
图3 本文算法流程图
本文采用单目相机进行铁鞋相对位移测量的具流程如下:首先使用单目相机对铁鞋所在区域进行图像采集,将采集的图像首先进行预处理即ROI区域提取、滤波、去噪,其次对预处理后图像进行改进DOG边缘检测得到铁鞋边缘图,然后在边缘的基础上提取铁鞋特征点。最后结合相机标定得出铁鞋的相对位移,算法流程图如图3所示。
2 相机标定

图4 铁鞋图像
像素距离与实际距离的转换需要对摄像头进行物象空间的标定。相机标定除了物象空间的标定,还应进行光学畸变标定和投影畸变标定,即因为安装位置误差代表的图像畸变矫正。相机标定是非常关键的环节,其标定结果的精度及算法的稳定性直接影响相机工作产生结果的准确性。因此,做好相机标定是做好后续工作的前提,提高标定精度是重点。
本文采用的物象空间标定方法是:固定相机采集铁鞋图像使其充满整个视野,如图4所示。已知的默认像素尺寸为v×h,以及铁鞋的实际长度L0,即可求出像素距离参数d。
(2)
3 改进DOG算子的铁鞋特征点提取
3.1 图像预处理
图像预处理是将图像进行特征抽取、滤波和分割等处理,以消除图像中无关的信息,恢复有用的真实信息,增强信息的可检测性。本文的预处理过程包括提取ROI区域、滤波和增强。采集到的图像背景复杂,感兴趣的区域(ROI)只有铁鞋一部分,因此需要提取ROI可大大较少处理像素个数达到优化算法执行时间的作用。ROI区域虽然减少了像素处理个数但同样含有一定的噪声,因此加强或抑制图像的某些细节是不可或缺的操作,处理效果的好坏直接影响后续图像处理和分析的可靠性。本文采用的是高斯滤波和中值滤波相结合的算法,有效去除了铁轨噪声的干扰和拍摄场地的其他椒盐噪声。尽管去除了噪声,可能会受天气和光照的影响,滤波后图像需要增强处理,本文采用CLAHE(限制对比度的自适应直方图均衡化)进行图像增强,增强后的图像有利于后续的边缘检测。图5显示了图像预处理流程图。
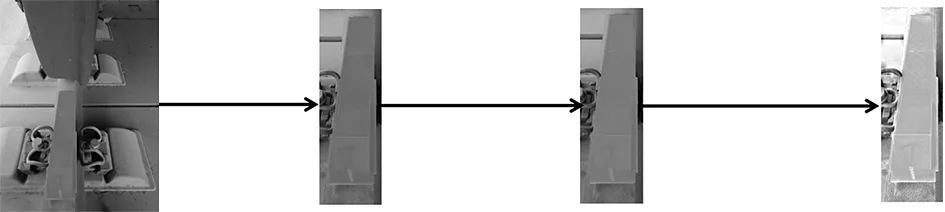
(a) 铁鞋图像 (b) ROI区域 (c) 滤波 (d) CLAHE增强
3.2 基于改进DOG算子的铁鞋边缘检测
图像的边缘在人类视觉和计算机视觉中均起着重要的作用,神经学和心理学的研究都表明,图像中突变位置对图像感知很重要,甚至有时候只考虑图像的边缘就可以大致理解图像内容,并且物体的特征点信息几乎都体现在边缘上。因此,铁鞋边缘的检测对后续特征点的提取极其重要。
3.2.1 高斯差分(DOG)算子
高斯差分(DOG)算子是对高斯拉普拉斯算(LOG)算子的近似。LOG算子是一种二阶微分算子边缘响应较好,但算子构造过程中需要对二维高斯函数进行拉普拉斯变换计算量很大,而DOG算子能很好的近似LOG算子,计算量较小的同时并能够保持较好的边缘响应。
设二维高斯函数:
(3)
其拉普拉斯变换(LOG):
(4)
二维高斯函数对δ的一阶偏导数如下:
(5)
(6)
根据一阶偏导定义:

(7)
显然得到LOG函数近似值为:
(8)

图6 DOG算子的边缘检测
式中,等号右侧成为高斯差分(DOG)函数,当k=0.95时,认为DOG与LOG的值近似相等。图6显示了对铁鞋图像进行DOG算子的边缘检测效果,从图中看出检测到的边缘粗略且包含许多无效边缘,因此还需进一步细化。
3.2.2 改进DOG算子的边缘细化
边缘细化是将基于DOG算子得到的边缘强度图进行寻找过零点操作。因为DOG算子是一种二阶微分算子,所以在边缘强度图中的过零像素点即为原图像的边缘像素点。图7显示了过零点于边缘检测中的作用。
设一元函数:
(9)
图7a显示了式(9)的曲线,图7b显示的是式(9)的一阶导数,相当于一阶微分等价于边缘强度的概念。对于一阶导数而言,|f′(x)|在x=0处是最大的,则对应到f(x)在x=0处函数值的变化率最大,即边缘强度最大。而图7c显示的二阶导数f″(x)在x=0处的函数值等于0,即x=0就是f″(x)的过零点,显然二阶导数的过零点即为f(x)变化率最大的点。因此在图像边缘检测中边缘强度图的过零像素点即为原图像的边缘像素点。
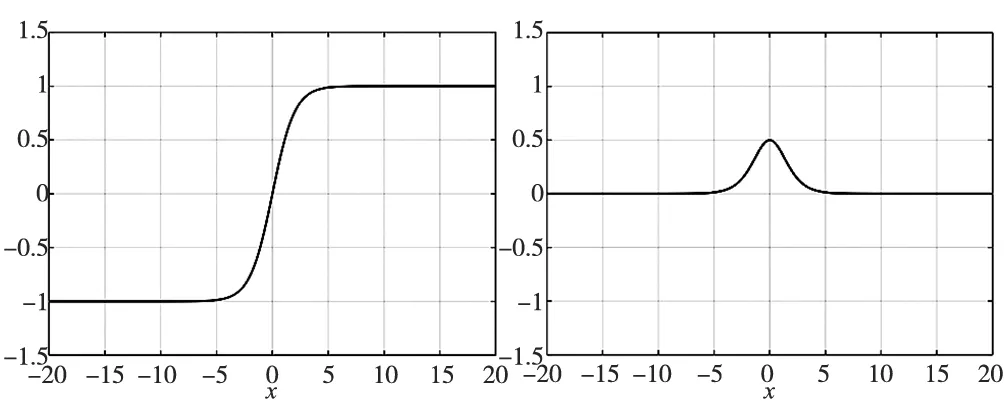
(a) f(x) (b) f ′(x)
本文采取的过零点检测方法如下:对边缘强度的每一个像素点判断以该像素的3×3领域内的上下方向、左右方向、左上右下方向及右上左下方向的像素值是否有异号出现来判断该像素点是否为过零点。原理如图8所示。
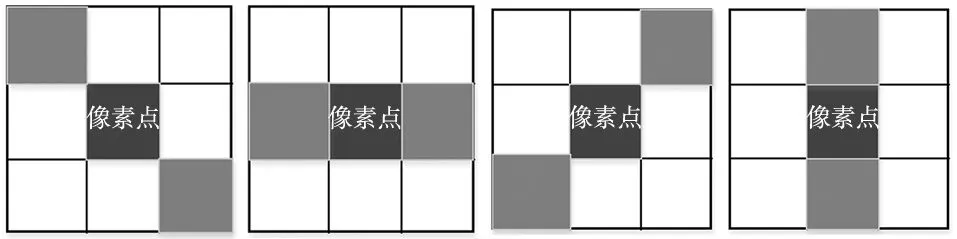
(a) 左上右下 (b) 左右 (c) 右上左下 (d) 上下
采用本文改进DOG算法得到的铁鞋边缘如图9所示。与未改进DOG算法得到的边缘相比,边缘细化效果十分明显,得到的边缘更清晰准确并且消除了大量无效边缘有利于后续的特征点提取。
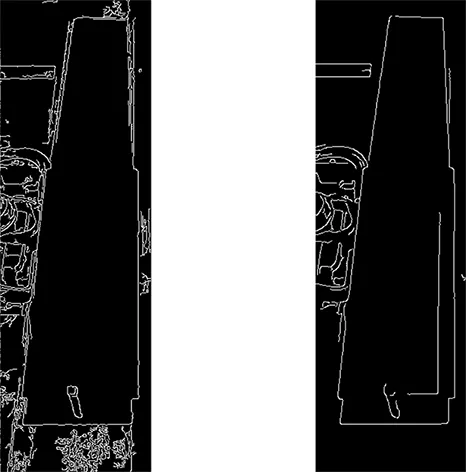
(a) DOG算法 (b) 改进DOG算法
3.3 特征点提取

L1=L1′×d
(10)
图10 像素投影
4 实验分析
为了测试本文算法得到铁鞋与车轮相对位移的精确性,采用鞋底总长410 mm的铁鞋置于铁轨上进行了实验。实验环境为长30 m的60 kg/m标准双轨,将固定有采集装置的三脚架以垂直于铁轨上一条线为基准位置进行铁鞋图像采集。铁鞋距车轮的实际距离采用机械游标卡尺测量,其测量范围0~350 mm,精度0.05 mm。移动铁鞋位置采集6组实验数据,使用公式(11)所示误差计算方法,其中检测距离为Δd,实际距离为Δs。实验结果及误差分析如表1所示。
由表1误差结果分析看,本文算法得到的距离与实际测量间的平均误差为0.495 mm,平均误差百分比为0.585%。本文采用的铁鞋相对位移检测方法误差保持在1%以内,对于检测铁鞋位置具有较高的精度,可以实现对铁鞋的准确定位。为了进一步说明本方法的精确性,通过了大量的现场数据,使用本文算法进行铁鞋相对位移测量,将测量数据整理得出折线图如图11所示,结果表明该实验实现了铁鞋位置的动态检测,检测误差较小,能精确地检测出铁鞋与车轮间的距离信息。
(11)
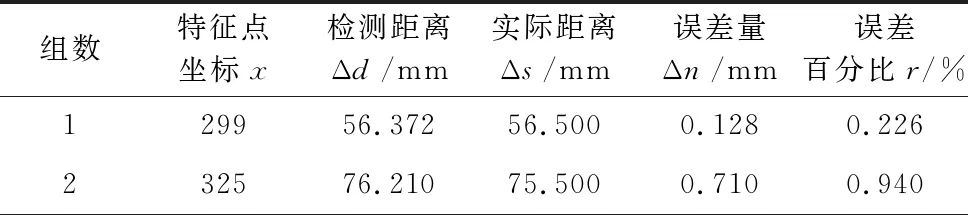
表1 铁鞋位置数据分析
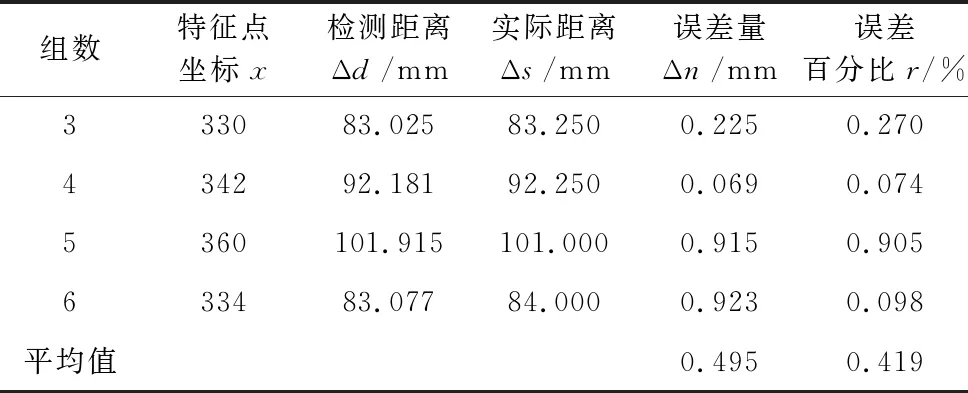
续表
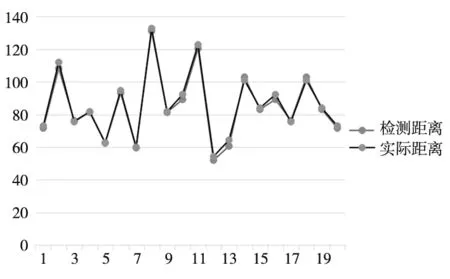
图11 铁鞋与车轮的检测距离与实际距离对比图
5 结论
为了提高铁鞋与车轮之间相对位移的检测精度,提出了一种基于改进DOG边缘检测算子的铁鞋与车轮之间相对位移的检测方法,提取到的铁鞋边缘更加细化清晰有利于后续的铁鞋特征点提取。实验结果表明,该方法测得的铁鞋相对位移十分精确,且误差均在1%以内。证明了该方法的可靠性和可行性,实现了铁鞋与车轮之间相对位移的非接触式检测。本方法的提出避免了铁鞋安装不到位引发的安全问题,实现集防溜、撤鞋、在轨检测于一体。为防止因车辆溜逸发生事故、确保车站行车安全提供一种技术保障。
