改进定子电阻辨识的滑模观测器PMSM无传感器控制*
2021-03-26曹晓月张旭秀
曹晓月,张旭秀
(大连交通大学电气信息工程学院,辽宁 大连 116021)
0 引言
永磁同步电机(PMSM)矢量控制系统中,转子信息的获取是控制系统的关键因素,通常用机械传感器如光电编码器、旋转变压器获取。但机械传感器因其体积大、价格高,易受环境因素等影响的缺陷,使得无传感器控制成为学者们研究的热点[1]。
无传感器控制主要分为在低速(零速)域的高频信号注入法和中高速域的基于数学型方法。其中高速域是通过提取反电动势或磁链信息估算转子信息,常用的方法有型参考自适应控制算法[2-4]、卡尔曼滤波器算法[5-6]和滑模观测器算法(SMO)[7-8]。其中SMO因其人为对运动轨迹的设计使电机对系统参数不敏感而具有较高的鲁棒性,在无传感器控制领域具有显著的优势。针对传统滑模变结构控制中开关函数的不连续特性,文献[9]通过设计指数趋近率的方法有效减弱抖振,提高了系统性能;文献[10]用饱和函数替代了传统的符号函数,在边界层内外采用线性和非线性联合控制的方法,有效的减弱了滑模观测器的抖振;文献[11]将超螺旋控制算法与滑模观测器结合有效地减缓了高频切换带来的抖振;文献[12-13]分别将自适应同步滤波器和包含两个同步频率提取的滤波器与正交锁相环相结合,使系统具有很好的跟踪性和鲁棒性;文献[14]提出了变论域模糊滑模观测器,削弱了抖振现象;文献[15-16]将糊控制的思想引入滑模观测器中,虽然提高了系统性能但是复合控制也加大了控制算法的复杂度;文献[17-18]将非奇异终端滑模与线性滑模相结合,利用其各自的优点设计了全局终端滑模控制器,减小了系统抖震,提高了系统的鲁棒性,但其观测器计算复杂,并且参数设计较多。
滑模观测器虽然有很强的鲁棒性,但是在电机的高速运行下会引起定子电阻发生变化,从而影响观测精度,本文给出了在线辨识定子电阻的滑模观测器设计。用分段指数型函数代替传统的符号函数削弱抖震,并依据Lyapunov 稳定性判据对系统进行稳定性分析;引入随观测电动势可变化滑模增益提高了系统的观测精度和鲁棒性。最后通过Matlab/Simulink仿真,证明该改进的滑模观测器能够提高系统的观测精度和鲁棒性。
1 PMSM传统滑模观测器控制
在假设定子铁心磁饱、不计涡流和磁滞损失的情况下,对表贴式永磁同步电机(Ld=Lq=L)在静止α-β坐标系下建立数学模型:
(1)
其中,iα、iβ,uα、uβ分别为定子电流、定子电压α-β轴分量;Eα、Eβ为反电动势α-β轴分量;we为电角速度;Rs为定子电阻。
滑模控制的实现要满足:

(2)
则构造滑模观测器方程:

(3)

设计控制律:

(4)
其中,k为滑模观测器切换增益,其取值应满足式(2);sign(s)为开关函数。


(5)
经过截止频率为wc的低通滤波器滤掉高频信号,得到反电动势估计值:

(6)
由于引进一阶低通滤波器后引起相位延迟,则最后估算转子位置为加上Δθ的补偿值,即为:
(7)
2 新型滑模观测器设计
2.1 开关函数的改进
符号函数sign(x)具有响应快的优点,也带来了系统的抖震,影响观测精度。本文给出分段型指数函数的开关函数,如式(8)所示:

(8)

则新的滑模观测器方程为:

(9)
结合式(9)、式(1),可以得到新的电流误差方程,继而得到新的反电动势方程:

(10)
其中符号函数由分段行指数函数代替。
指数型分段函数示意图如图1所示。

图1 指数型分段函数示意图
2.2 稳定性分析


(11)

则最终得到系统的稳定性条件为:
k>max(|Eα|,|Eβ|)
(12)
2.3 变滑模增益

(13)
该增益k的变化能够随着反电动势的变化而变化,也可理解为随速度动态调整,更好的适应了系统的运行状态,提高观测精度。km为比例系数,其值可由拟合电机不同速度下的最优参数得到。
3 定子电阻的在线辨识
电机参数一般是固定的,但是随着工况的改变,例如温度和磁饱和程度等会使电机参数发生变化。滑模观测器虽然有很好的鲁棒性,但是在大电流运转状态下由温度升高引起的定子电阻变化会对控制算法在精度上有一定的影响。由公式(8)估算的转子位置:
可以看出,定子电阻Rs的变化对转子信息的估计有一定影响。所以将电子电阻辨识出后反馈到系统,对提高观测精度有着重要作用。

(14)
结合式(14)、式(1),得到电流误差方程:

由式(13)可知,A<0。则令
经过以上证明,含有定子电阻辨识的滑模观测器系统不影响原系统的稳定性。将辨识出来的定子电阻值反馈到型当中,使模型参数更加精确,提高系统观测精度。含定子电阻的滑模观测器结构图如图2所示。

图2 含有定子电阻辨识的滑模观测器
4 仿真分析
为验证改进的滑模观测器的性能,本文在MATLAB/Simulink上搭建了基于改进滑模观测器的PMSM无传感器控制的表贴式永磁同步电机仿真模型,并与基于传统的滑模观测器PMSM无传感器控制进行对比。其中电机的参数如表1所示。图3为搭建的改进型的仿真型。其中nref为给定参考速度,TL为可变负载转矩,采用id=0的电流双闭环,速度单闭环控制,其中GJ-SMO为本文改进的滑膜观测器,系统运行0.15 s。

表1 电机参数数值表
4.1 转速、转矩突变系统性能
给定系统初始速度为600 r/min,在0.1 s速度突变为1000 r/min,转矩由0 N·m在0.05 s突增为4 N·m。系统运行0.15 s。图4、图5分别为基于SMO与GJ-SMO的PMSM无传感控制结果。

图3 基于改进滑模观测器的PMSM无传感器控制的仿真模型

(a) SMO的电机转速估计值与实际值 (b) SMO的转速估计误差

(a) GJ-SMO的转速估计值与实际值 (b) GJ-SMO的转速估计误差
分别观察图4a和图5a。图4a中,SMO速度变化曲线整体波动较大,在启动时出现抖震,需要0.15 s系统才能大致稳定;在速度突变时,转速上升50 r,0.02 s才能稳定,调节时间过大,最终转速稳定+8 r附近;图5a中,转速曲线整体较SMO要平滑许多,基本无波动,空载启动时,0.008 s稳定,优于SMO的0.15 s;在转速突变时,经过转速提升后能很快的恢复稳定,调节时间0.01 s,最终稳定在+1.5 r,精度要远高于SMO。在转矩突变时,转速都有一个下降,SMO转速下降23 r,调节时间0.008 s;GJ-SMO转速下降13 r,调节时间0.004 s,观察图4b、图5b,SMO的转速误差在{-10,+10)的区间,GJ-SMO转速误差精度在(-1,+3),转速精度大大提高。可以看出在转速和转矩突变时,改进的滑模观测器在减小抖震、稳定快速和精度方面都有很大提升。
由图4c、图5c局部放大图可以看出,SMO的实际值与估计值是有一定相位差的,而GJ-SMO二者相位差要减小许多,图线基本重合。由图4d、图5d可以看出,SMO在0.1 s速度提升时,位置误差由(0.02,0.04)的范围提升到(0.04,0.05)的误差范围;而GJ-SMO在速度提升瞬间,位置误差由(0,0.005)到(0.005,0.01)的范围,位置误差精度大幅提高。
图4e、图5e为二者转矩变化,SMO的转矩效果不是太好,抖动太大,而GJ-SMO在经过转矩突变和转速突变时,转矩实现较好的变化情况,整体波动较小,调节时间快。
图4f、图5f中,GJ-SMO的三项电流要远远优于SMO的,不管是启动、转矩突变还是转速突变,都能很好的控制,只有在转速突变后出现小幅波动,因为此时要提速,之后很快便稳定。
4.2 定子电阻变化性能测试
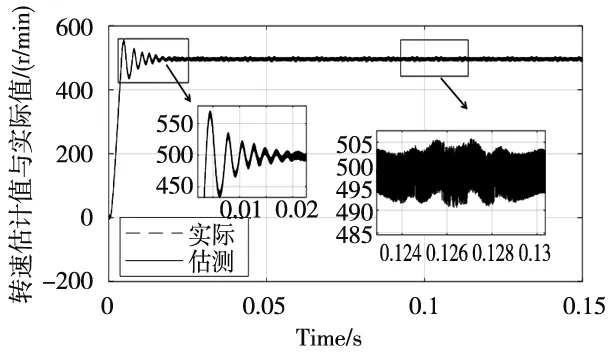
为观察定子电阻变化后估计参数的跟踪能力,设定电机运行速度500 r/min,转矩恒定2 N.m,定子电阻为1.5Rs,电机其他参数不变。观察传统滑模观测器和改进的滑模观测器的PMSM控制效果。如图6、图7所示。
(a) SMO转速估计值与实际值及其局部图

(a) GJ-SMO转速估计值与实际值及其局部图
由图6a、图7a对比可以看出,在定子电阻变为1.5Rs时,GJ-SMO在启动后的调节时间0.01 s优于SMO的0.02 s,并且转速误差在(-2,1)的精度范围,优于SMO的(-5,5)误差范围大大提高了转速的观测精度,并且系统能够快速稳定;由图6b、图6c、图7b、图7c可以看出,GJ-SMO估计转子位置与实际值基本重合,位置误差在0.005,优于SMO的0.03误差,说明加入定子电阻辨识的滑模观测器能够快速准确地估算出转子速度和位置信息,提高系统的响应速度和观测精度。
5 总结
本文针对传统滑模观测器估算转速和位置结果存在抖震和参数精度不高的问题,给出了一种基于在线辨识定子电阻的新型滑模观测器永磁同步电机的无传感器控制系统。为减小参数估计的抖震,用分段型指数开关函数代替传统的符号函数;并且设计了随观测电动势可变的滑模增益,增强系统的动态性能。在中高速性能测试中,估计参数在转速、负载突变时能很快调整并能很好的跟踪实际值,减少调节时间,并能有效地减少抖震且保持较高的估计精度;在加入的在线辨识定子电阻环节中,系统对定子电阻变化有很强的鲁棒性,转子位置和速度观测不受定子电阻变化,观测精度较高,动态响应迅速。
