基于自适应ROI算法的光斑中心检测*
2021-03-26许丹丹马增强钱荣威李俊峰
许丹丹,马增强,2,钱荣威,周 涵,李俊峰
(1.石家庄铁道大学电气与电子工程学院,石家庄 050043;2.石家庄铁道大学省部共建交通工程结构力学行为与系统安全国家重点实验室,石家庄 050043;3. 广州理工学院电气与电子工程学院,广州 510540 )
0 引言
在光学测量中,激光光斑检测具有重要应用价值,是光学检测系统的关键技术[1-2],尤其在远距离测量中。随着检测距离的增加会给采集到的光斑图像带来更多的噪声干扰,尤其是在较强光照条件下,对光斑中心的检测精度影响十分明显。传统的激光光斑检测方法包括灰度重心法[3-4]、质心法[5-6]、空间中心矩法[7]等。使用灰度重心法及质心法进行光斑中心检测时要求激光光斑图像均匀分布且边缘清晰,否则会导致较大的误差,而实际工况下因为光照等噪声的存在很难满足这一要求。在空间中心矩算法中,它利用边缘的灰度空间矩来检测具有亚像素位置的边缘。但计算过程包含多次卷积,运算量较大实时性较低。在实际测量环境中光斑投射点一般暴露在室外条件下,其噪声干扰大部分是由光照条件变化引起。当光照较弱时光斑与背景对比度较低图像较为模糊,无法分清前景与背景。当光照较强时,背景光影响的程度更为严重,极大的影响了光斑中心的准确提取。本文主要研究强光照条件的光斑中心提取,采用算法优化的方法来解决问题。
1 光斑图像退化情况
在野外进行测试时,受到强烈太阳光的影响,靶面上成像的光斑图像会严重退化,使得光斑的亮度低于周围亮度、光斑边缘不清晰、圆形光斑形变等。在光照较为均衡的情况下对光斑图像进行阈值分割可较好分理出前景与背景。但在光照较强时,背景光的影响较为严重使得二值化后的部分光斑信息丢失,使得图像处理算法无法准确地提取出光斑中心。
为更好说明不同光照对光斑图像的影响,选取不同光照条件下采集的光斑图像(63像素×63像素)如图1所示来进行说明。若想定位激光光斑的中心,典型方法是找到复杂背景下圆形区域,之后对图像进行二值化找到边缘,进行圆拟合获得中心坐标。由图1a可知,光照均衡下的光斑图像在进行阈值分割后,可较好地将光斑从背景中分割出来;但是在光照较强的情况下,二值化后的光斑信息部分丢失与背景融为一体,极大地影响了后续的光斑中心点提取,因此对强光照下光斑中心提取的研究十分必要。

(a) 光照均衡 (b) 强光照
2 基于SSIM的自适应ROI提取
为了解决强光下光斑中心检测产生误差这一难题,本文提出了一种基于SSIM的自适应ROI算法,核心是利用结构相似度匹配出强光下的光斑最小外接矩形区域。强光下光斑中心检测的总体流程如图2所示。首先在无光照影响的条件下采集光斑图像进行二值化处理,将获取的光斑作为匹配模板保存到预设文件夹中,其次是采集室外环境下的光斑图像并保存到与模板相同的文件夹中,在程序中设置相应的初始化信息,按照流程图进行,获得需要的光斑感兴趣区域,对采集到的最小ROI进行二值化和圆拟合算法处理,记录光斑中心坐标。
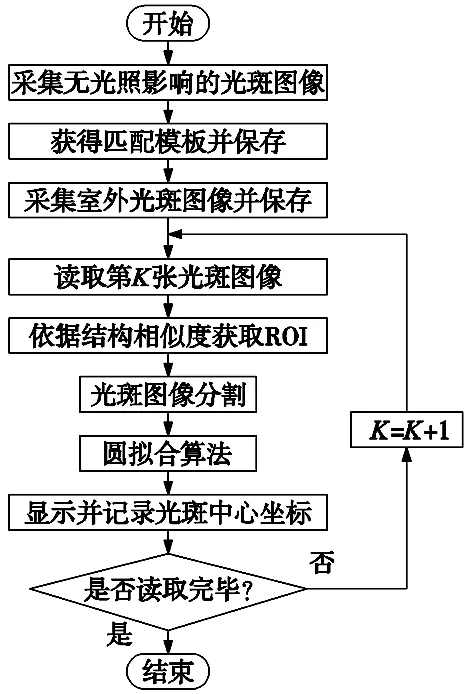
图2 强光下光斑中心检测流程图
2.1 结构相似度(SSIM)
人是通过图像中的结构轮廓识别信息的,SSIM算法(structural similarity index)[8]就是以人眼系统为基础的,认为两幅图像像素间具有结构相似性、有很强的结构相关性,是一种衡量两幅图像相似度的指标。该指标首先由德州大学奥斯丁分校的图像和视频工程实验室(Laboratory for Image and Video Engineering)提出。该算法从亮度、对比度、结构三方面比较两幅图像,并度量两者的相似程度。
SSIM算法框图如图3所示。图像I和O分别代表输入图像和输出图像,尺寸均为H*W,通过亮度相似度l(I,O)、对比度相似度c(I,O)和结构相似度s(I,O)来计算两幅图像的相似度度量SSIM,定义如下:
SSIM(I,O)=l(I,O)·c(I,O)·s(I,O)
(1)
其中,l代表亮度,c代表对比度,s代表结构,即:
(2)
(3)
(4)
其中,C1、C2和C3为固定正数,是为了避免分母出现0的情况,通常取C1=(K1*N)2,C2=(K2*N)2,C3=C2/2(K1=0.01,K2=0.03,N=255),μI、μO分别表示图像I和O的均值,δI、δO分别表示图像I和O的标准方差,δIO表示图像I和O的协方差,即:
(5)
(6)
(7)
(8)
SSIM的取值范围为[0,1]数值越大,表示两幅图像越相似。
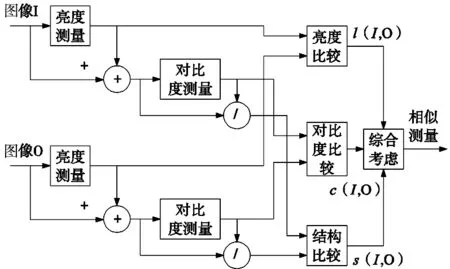
图3 SSIM实现框图
SSIM算法常用于图像的质量评价[9],主要依靠采集的图像虽然部分信息丢失,但总体轮廓变化不大这一特点。本文的光斑检测通过结构相似度和模板匹配相结合,将光斑感兴趣区域提取问题转化为强光下光斑失真图像与暗背景模板间结构相似度问题,匹配得到的最相似区域即为包含光斑的最小的ROI。
2.2 基于SSIM的光斑ROI提取
自适应ROI算法是一种高精度、高运算速度的方法,用来获取强光照背景下的光斑的最小ROI。图4所示为自适应ROI算法的步骤流程。首先是获取原始图像,该图像要求没有光照噪声的影响,对其进行二值化清晰地分离出光斑获得匹配模板并记录模板的尺寸。其次是采集实际工况下的光斑,将其与匹配模板进行循环的结构相似度的测量,记录最大结构相似度的位置并提取,如图4c所示,图中矩形框的尺寸等于匹配模板的尺寸,研究这一包含激光光斑的矩形框区域以计算光斑中心,这一区域即为本文所提的自适应ROI。获得的自适应ROI图像如图4d所示,该图像包含一个没有强光背景的清晰激光光斑。

(a) 暗背景图(b) 亮背景图(c) 匹配结果(d) ROI图
其中,光斑ROI提取的理论依据是:将采集到的光斑图像与光斑模板图像进行循环匹配:在采集的光斑图像中通过比较其与光斑模板的结构相似度,获得光斑在图像中的位置。如图5所示,设光斑模板O(r0,c0)大小为w×h,采集的图I(r1,c1)大小为W×H,将光斑模板叠放在大图上进行平移,覆盖大图的区域部分与光斑模板做结构相似度计算,得到判断矩阵R,R中SSIM值越大说明此坐标位置与理想光斑越相似,ROI的提取效果越好。其中判断矩阵R定义为:
R(r,c)=SSIM[I(r1,c1),O(r0,c0)]
(9)
如果输入图像I的大小是(W×H),理想光斑图像的大小是(w×h),输出的结果的R的大小就是(W-w+1,H-h+1)。其中,R为归一化矩阵,可将尺度变换为[0,255]进行可视化显示。遍历R中每一个像素点,找到最大值并得到坐标(rm,cm):
rm,cm=argr,c∈[W-w+1,H-h+1]max[R(r,c)]
(10)
即为待提取ROI的左顶点坐标,选取ROI尺寸得到所需的ROI区域:
ROI=I[rm:rm+h+1,cm+w+1]
(11)
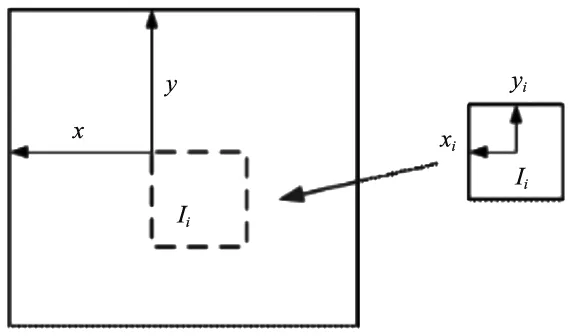
图5 匹配算法
其中,匹配算法利用模板在全图中进行搜索,计算步长不同获得的精度也就不同。为了提高匹配的精度并提高计算速度,需要根据SSIM反馈以调整计算步长,既能够保证精确度,又能提高运算速度。自适应ROI在计算步长和结构相似度计算之间存在反馈通道,根据SSIM的结果对步长进行动态调整。
自适应ROI能够去除图像中绝大部分不利光照。图6a所示为强曝光背景下采集的激光光斑图像,以及采用三种不同阈值对图像进行分割处理所得二值化光斑图,由分割结果可知:直接对强光下的光斑图像进行处理均不能准确地将激光光斑和背景完全分离。图6b所示ROI图像是对图6a曝光图进行SSIM匹配后的结果图,对结果图再次进行上述不同阈值分割处理,由分割图可知:激光光斑采用自适应ROI算法,将光斑最小外接矩形提取后,能将绝大部分的强光噪声剔除,采用不同的阈值均能很好地将光斑从背景中分割出来。

(a) 原图像
以下进一步说明改进算法在计算精度和运算速度方面的优势。光斑图像直方图对比如图7所示。图7a是图6a中曝光图的直方图,也即强光下采集的光斑原始图像的直方图,由图可知像素值为180~200占的比重很大,并且整幅图像的像素值几乎均匀地分布在200~250,没有明显的分界线,无明显的双峰分布规律,这就导致采用不同的阈值无法准确将光斑图像与背景分离。图7b是图6b中ROI图像的直方图,也即经自适应ROI算法处理后光斑图像的直方图,可以看出像素值约为220和250时比重很大,像素值约为240时比重很小,即处理后的光斑图像直方图具有明显的双峰和低谷,十分契合阈值分割的理念,通过选取合适的阈值便可较好的将图像的前景与背景分离开来。通过直方图对比可知本文算法能够适应不同强度光照,提供了精确检测光斑中心的有效手段。
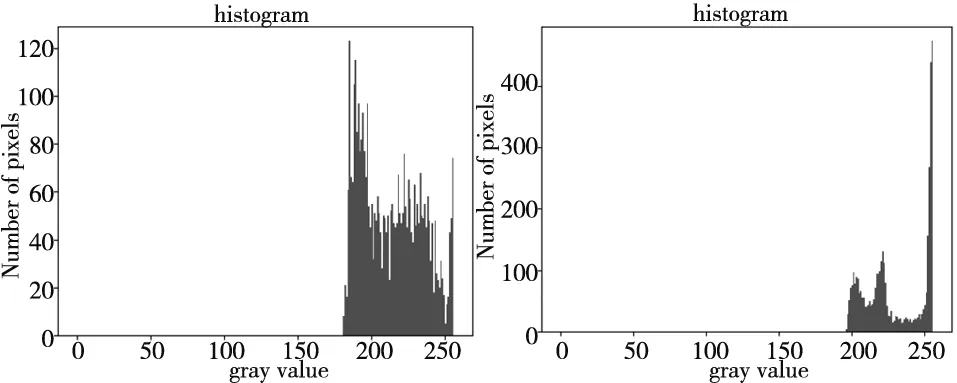
(a) 原始直方图 (b) 自适应ROI直方图
图8是加入反馈通道后的自适应ROI算法和传统模板匹配算法的运行时间的对比图。
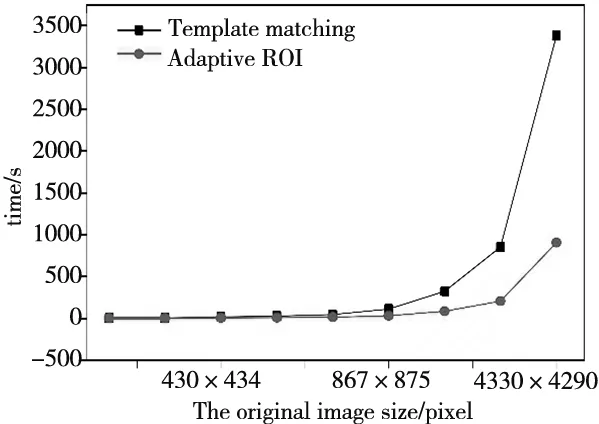
图8 自适应ROI与模板匹配的运算速度对比
由图可知,传统匹配算法和本文自适应ROI算法运行时间都会随图像尺寸的增大而增加,但是尺寸越大,本文算法的优势愈加明显。原因在于传统模板匹配随图像尺寸的增加而成倍地增加卷积次数,本文算法根据SSIM来调整步长,当SSIM较小时,说明定位区域较此位置较远,通过反馈增加步长,达到快速计算的目的;反之SSIM较大时,说明要定位的区域就在附近,通过减小步长来进行搜索。极大地提高了运算速度。因此从定性与定量的综合角度上,本文所提出的自适应ROI算法在进行光斑的提取中具有明显优势。
2.3 光斑中心检测

图9 光斑中心检测
前文通过类间方差最大化得到光斑二值图,清晰地区分出光斑和背景,此时需要获取光斑的中心。本文采用圆拟合算法进行检测,其依据是:采用最小二乘法的原理(残差平方和最小)来逼近激光光斑的轮廓[10-11]。此方法计算速度快、精度高,适用于实际工况下的实时检测系统。图9是标注在ROI图像中的检测结果,光斑中心坐标为(32,32)。
3 实验验证

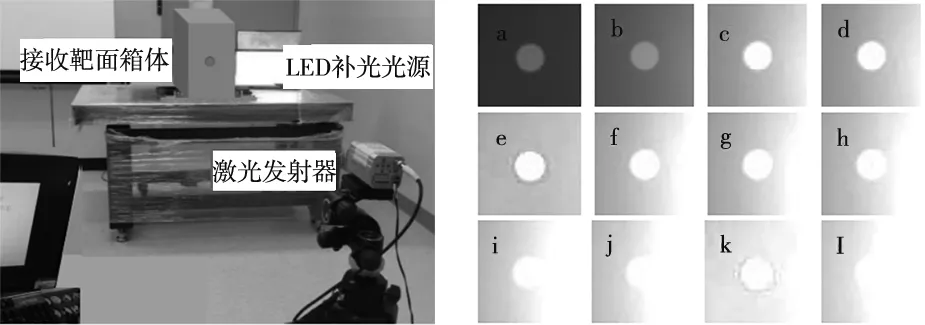
图10 实验设备 图11 不同光照条件下的光斑图像
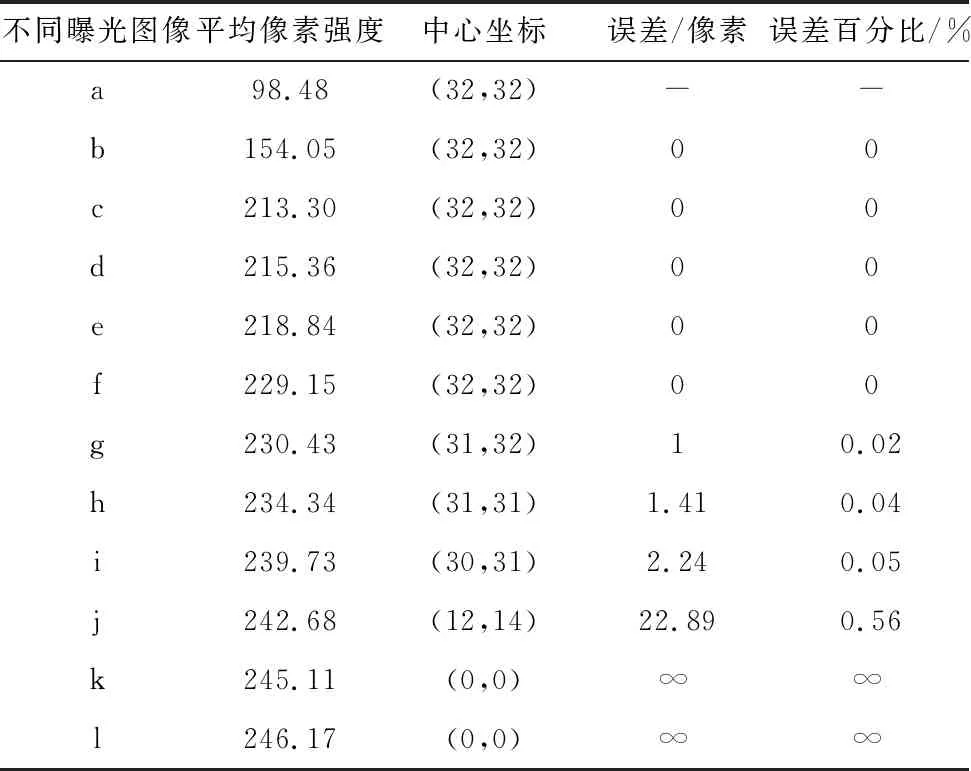
表1 自适应ROI光斑中心检测方法误差
由表1可知,随着LED光源对光斑的影响增加,图像的平均像素强度也在增加,当像素强度在230以下时,自适应ROI的方法能够无误差地检测出中心坐标;当像素强度超过230并在240以内时,自适应ROI方法出现了测量误差但保证在0.05%之内;然而当光源过亮遮挡住光斑,即平均像素强度超过245时已经无法检测光斑中心。这便是本文算法的限制条件,这同样也是现有算法中无法解决的问题。
在上述限制条件下,又进行了大量实验,结果表明自适应ROI方法能够在不利光照下检测光斑中心,并能与实际光斑中心保持高度一致,能够避免实际工况中不利光照引起的较大测量误差。
4 结论
在需要激光光斑进行光学检测系统中,随着检测距离和光照强度的增加会给采集到的光斑图像带来更多的噪声干扰,导致检测结果出现错误。本文在结构相似度的基础上提出了一种自适应ROI的光斑中心检测算法,提取到的光斑图像不易受背景光的影响有利于后续的圆心检测。实验结果表明,在平均像素强度低于240时,该方法能更好地适应光照影响且计算误差均在0.05%以内,具有较高的精度,能够适用于实际工况下微小位移的测量。
