基于三维激光扫描的矿区道路沉陷监测研究
2021-03-26查剑锋李得军杨默含
王 腾,查剑锋,张 民,李得军,兰 青,杨默含,何 陈
(1.江苏省资源环境信息工程重点实验室,江苏 徐州 221000;2.中国矿业大学 环境与测绘学院,江苏 徐州 221116;3.兖州煤业股份有限公司杨村煤矿,山东 济宁 202118)
矿产资源的大规模开采,带来经济效益的同时也给开采区域带来了一系列消极影响。在开采过程中,岩体在开采区域移动并变形,形成了大面积采空区,导致地表的大型沉降[1]。其中,道路沉陷是地表沉降的主要形式之一。道路沉陷使路面产生裂缝、下沉、坑槽、跳车等路面病害,影响交通安全[2]。因此,研究矿区道路沉陷对于合理开采矿产资源,有效控制或减缓地表沉降以及开展沉陷区修复工作具有重要意义[3,4]。
目前,道路沉陷的监测方法主要有4种:一是传统的水准测量法,使用水准仪测量道路沉陷区高程,水准测量法操作简便,在矿区沉陷监测中应用广泛[5];二是全站仪法,使用全站仪测量沉陷区地面点的三维坐标;三是GPS水准法,GPS技术具有其全天候、测量精度高、方法简单,观测速度快的优点[6];四是RS监测方法,使用雷达差分干涉测量技术得到沉陷监测结果[7]。
三维激光扫描技术与现有技术相比,有以下优点:①高效性,三维激光扫描可以快速获取点位信息,单点耗时仅几毫秒,而且三维激光测量距离长,采取非接触扫描目标的方式进行测量,可以有效提高作业效率[8];②测量精度高,三维激光扫描测量的点位误差为毫米级,目标点位的精度极高[9];③分辨率高,三维激光扫描可以获取海量单点数据,可以对道路进行高密度的表面信息,形成路面点云。
鉴于三维激光扫描技术优点,大量学者将其用运用到了矿区形变监测[10,11,14]、公路识别监测[12,13]、建筑物监测[15,16]、边坡监测[17,18]等诸多领域。本次研究对象为矿区道路沉降信息提取。现有矿区形变监测中,主要是利用三维激光扫描技术获取矿区地面形变,克服了传递少量监测点监测的缺陷,能够提供大量监测数据,但存在拼接困难、数据量大、处理难度高等问题。公路识别监测中,现有大量研究基于车载激光雷达识别道路标识线、道路建筑等,为无人驾驶等提供技术支持,同时也有相关研究基于三维激光扫面技术,就道路变形提取进行了相关研究,能为道路治理修复提供有效依据,但存在监测精度较低等缺陷。张豪杰使用三维激光扫描技术,对矿区道路下沉进行分析,并绘制了道路下沉等值线图[14],但其监测精度相对较低,对道路提取研究较少。鉴于此,本文采用基于控制网布设的三维激光扫描作业方式,提出了一种基于反射率、坡度等信息提取道路点云数据方法,在此基础上绘制了道路表面模型,对道路沉降信息进行监测,并在五沟煤矿S203省道进行实验研究。
1 研究方法
在本次研究区域内,道路两边为农田、河流、树木以及零散建筑物,这些材质与道路材质明显不同,利用三维激光扫描仪得到的点云数据中,主要表现在其反射强度上,即道路与其它地物反射强度有明显区别,即能够利用反射强度值实现道路点云提取,此过程能够剔除绝大多数非道路点。且道路为线性结构,在宽度方向上高程其坡度应大致相同,即非道路点与道路点构成的坡度会存在明显的异常,利用该特点能够对初筛选得到的点云数据,进行二次筛选,得到最终道路点云数据。
利用已获取的道路点云数据,构建道路表面模型;将各期数据与原始道路数据进行差值处理即可得到下沉量。由于各期数据点位同原始道路点位不同,因此,根据各期数据点位信息,利用插值得到对应在原始数据点位高程值,再进行差值运算即可得到对应点位的下沉信息。继而对下沉数据进行栅格化处理,可获得道路下沉模型。数据插值以及栅格化处理可采用反距离加权、克里金插值等多种方式。道路各点高程值以及下沉量均存在局部影响,且这种影响随着距离的增加而减弱,因此,本文采用反距离加权法。
以待求点为中心,设定影响范围R;将该影响范围内的所有点计入影响矩阵中,并计算各点距中心点的距离,用各点距离除以各点距中心距离之和作为该点对中心点的影响因子,中心点值为每个点对应影响因子乘以该点值之和。具体公式如下:
式中,i为待求点;j为待求点周围点;Wi,Wj代表对应点下沉值;hj为周围点距待求点距离值。
2 三维激光扫描实验验证
S203省道南北向自五沟矿上方通过,利用三维激光扫描仪对AB段进行扫描,并在其间布置水准控制点B0-B18,研究该矿的1016工作面开采对省道产生采动影响。

图1 工作面井上下对照
使用三维激光扫描仪进行点云数据采集之前,构建控制网;由于首级控制点较远,所以需要布设对应的次级控制点以连接首级控制点和扫描站点,使用三等水准进行高程测量;对应的控制点设计如图2所示,其中K是首级控制点,P是次级控制点,Z是对应三维激光扫描仪对应的站点。

图2 控制网布设方案
使用RIGEL VZ-1000 全站式地面三维激光扫描仪获取道路点云数据;Rigel VZ-1000架站的距离等需要进行道路面观测,最佳距离为40~60m,密度设置在0.006mm,相邻测站之间距离为90m,距离标靶距离为45m,用于拼接的标靶为4个,布设成不同高度的不规则形状。
本次实验采用后视定位,利用标靶作为公共点进行拼接,共测量得到2个控制点,而后以控制点作为三维激光扫描仪安置点并进行扫描,并按照仪器操作流程工作进行多站扫描,在获取数据后,对数据进行拼接等预处理操作,提取研究区域内点云数据。实验共进行了五期扫描作业(时间分别为2018年4月22日、2018年8月8日、2018年9月17日、2018年10月15日、2018年11月25日),实验流程如图3所示。
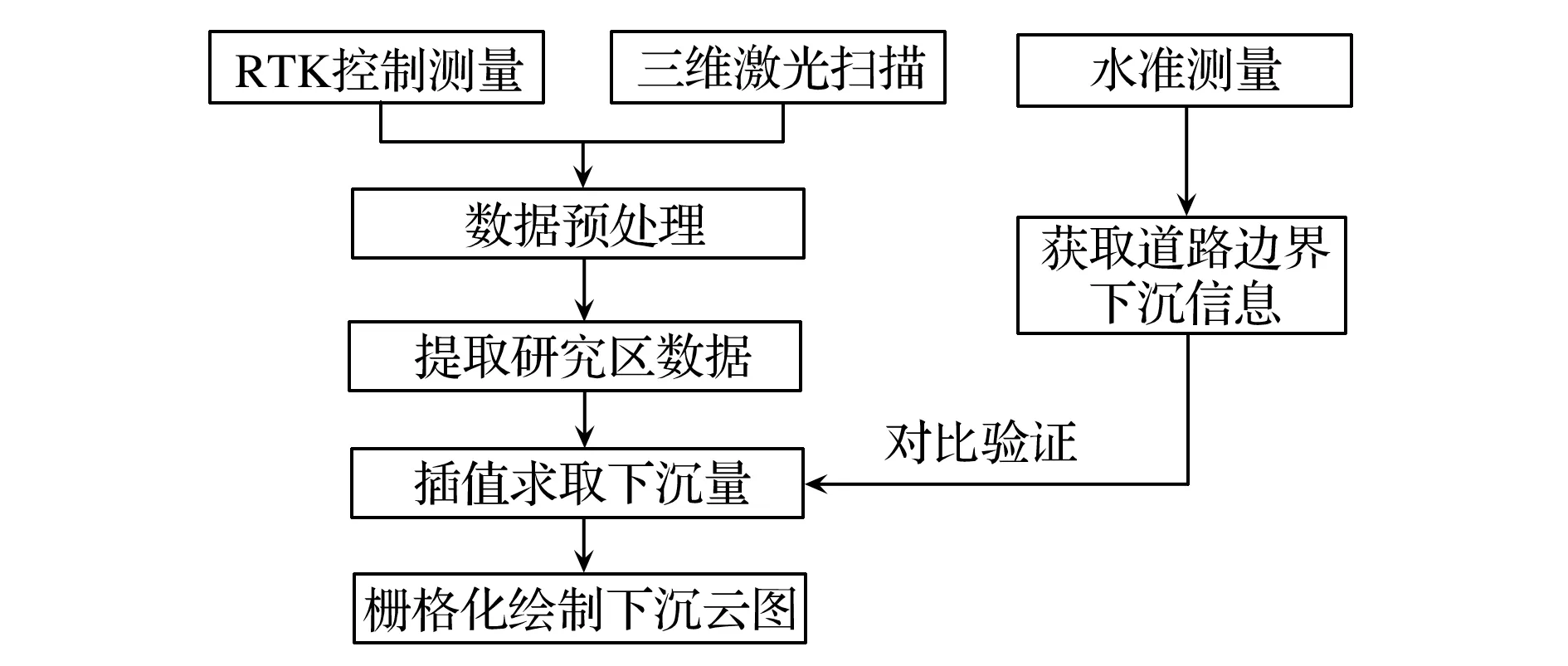
图3 激光扫描沉降区云数据获取流程
2.1 点云数据预处理
由于点云数据受表面粗糙度、点云密度等影响,数据不能直接使用,需要进行预处理。主要包括点云拼接、滤波、抽稀、分割等操作。
点云拼接时通过后视定向,首期通过后视定向一个控制点,然后其他站点以该控制点为基础,依次通过4个控制标靶进行拼接,直至到最后一站。本文通过Riscan Pro软件进行处理。本次实验拼接误差均在5mm以内。点云数据拼接后模型如图4所示,分割后的道路点云如图5所示。

图4 公路扫描全局图

图5 道路点云图
点云滤波是为了去除噪声点,可以通过人工干预或者使用去噪声算法,针对部分明显的点云,如树木等,直接手动删除;对随机噪音,需要使用滤波算法,本文使用Riscan Pro中自带的算法进行。由于点云采样密度较高,在研究道路时,较高的点云数据处理困难,需要进行点云抽稀,Riscan Pro软件中设置的八叉树方法进行。基于反射率坡度等信息实现道路点云提取。
在预处理完成后,可利用RISCAN PRO实现对研究区域内点云数据的提取并将其点云数据导出,导出为文本文件,(N,X,Y,Z);其中,N为点号信息,X,Y,Z表示对应点的坐标分量。
2.2 计算各期下沉值并绘制道路下沉模型
导出处理后的道路点云数据后,计算各期数据与原始数据差值。由于每期道路点云点位不相同,差值处理前,应根据各期数据点位信息对原始数据进行反距离插值求取对应点位高程值。
得到各期下沉信息后,应根据各期道路坐标值对其进行栅格化处理。进行栅格化处理时,应充分考虑道路形状以及各期道路是否发生水平移动,而后设定单位栅格长度。本次实验道路发生了水平移动,本文就道路沉陷进行研究,因此忽略水平移动情况。
以网格格点为中心,利用反距离加权计算出各格点的下沉值,在进行反距离加权时,需考虑距离影响范围,最终绘制出各期道路云图,各期下沉情况如图6至图9所示。

图6 四期道路下沉情况
并根据各期下沉模型,除去部分噪点,可以计算各期数据下沉最大值等信息;具体情况见表1。

表1 各期数据下沉最大值
2.3 与实测水准数据对比
通过与实测水准数据对比,水准点布设沿道路进行(点号为B0-B19),以分析三维激光扫描数据进行插值求沉降的合理性,各期相对第一期数据下沉量,如图7所示。使用对应的点云数据,以3075为起点,每10m选择一个点云数据,获得相应的下沉曲线,如图8所示。

图7 各期控制点下沉曲线
由于水准观测点位于道路两侧,与实际道路中线下沉点存在一定差距;由图7和图8可知,水准控制点下沉值和道路中线下沉值两者趋势基本一致;对比点云数据与水准数据下沉值(图9),可知对应水准控制点下沉值相差均在±1cm;利用三维激光扫描数据绘制出的道路中线能够较好反应下沉盆地。
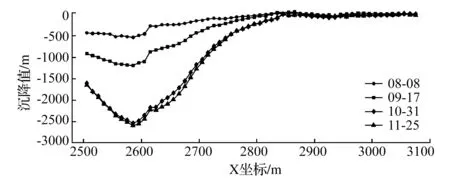
图8 各期道路中线下沉曲线

图9 水准控制点与点云控制点下沉值之差
采空区中心位于2600附近,绘制了四期道路下沉模型(图6),下沉模型与采动下沉盆地相符;三维点云提取绘制的道路下沉云图与实测水准数据趋势相同;水准测得最大下沉值与三维激光分析下沉值基本吻合。模型能够直观地观测道路下沉情况,并能够在一定程度上反映出开采作业对道路的影响情况。本文提出方法能够有效、快速、自动、准确地绘制出道路下沉图,能够为道路监测提供依据。
3 结 语
基于三维激光扫描可以高密度、高效率、高精度提取道路表面模型的特点,本文提出一种将三维激光应用到矿区道路沉陷监测中的方法。首先,根据数据点位信息,利用插值得到对应在原始数据点位高程值,进行差值得到各点位下沉值;在得到道路下沉数据后,对下沉数据进行栅格化处理,从而得到道路下沉模型。并在五沟煤矿沉陷区进行了实验,能够有效的反应道路下沉图,并提取道路中线绘制了道路中线下沉图,与水准测量成果趋势相同,且点云对应控制点误差在1cm,验证了该方法的可行性。同时,可利用下沉信息进一步求取道路倾斜、曲率等变形信息,能为采动区道路监测及维护进行指导和参考。
