一种短航程再入解析预测校正制导方法
2021-03-26周亮张洪波
周亮,张洪波
(国防科技大学 空天科学学院,长沙410073)
飞船是一类通过质心偏置实现低升阻比(一般小于0.5)的再入飞行器。对载人探月任务,飞船以接近第二宇宙速度的高速再入大气。由于飞船再入初始能量高,为保证航天员人身安全及任务航程适应性的需要,飞船通常采用跳跃式再入返回方式减小再入过程中的过载和热流峰值[1]。飞船以较小的再入角进入大气层后,通过控制倾侧角调整气动力在纵侧向的分配,在升力作用下再次冲出大气层,做一段弹道式飞行后,再一次进入大气层的返回再入。此类跳跃式再入方法已开展飞行试验,中国在2014年探月三期月地高速再入返回飞行器上也取得了成功[2]。在飞船出现应急情况,需要应急快速返回时,跳跃式再入方式存在再入时间较长的问题,因此,有必要开展应急情况下的再入问题制导方法研究。
目前,神舟、联盟载人飞船等在轨道运行阶段,自主应急返回程序主要采用弹道式再入返回方案。弹道式再入方式实现简单,但存在再入过载较大,可能达到10g0以上,并且存在返回舱着陆点散布范围大的问题[3]。
飞船再入过程中存在热流、过载及动压等约束,为实现安全返回,飞船需要按照一定的导引规律返回,即再入制导。目前,再入制导方法主要分为2类:标准轨迹跟踪再入制导方法和预测校正再入制导方法。
标准轨迹跟踪再入制导方法由轨迹规划和轨迹跟踪2部分组成,通过跟踪离线或在线规划的满足再入约束的参考轨迹,保证飞行器的实际轨迹满足再入约束要求。国内外均开展了大量相关研究,经典的Apollo制导方法[4]和航天飞机制导方法[5]均属于标准轨迹跟踪再入制导方法。
预测校正再入制导方法作为本文的研究重点,是根据一定的指令剖面和再入运动模型,对再入轨迹进行预测,利用预测轨迹终端与期望值间的误差校正制导参数剖面,以满足再入任务需求的一种方法。该制导方法可以根据飞行器的状态、模型的变化而进行调整,具有很强的通用性和鲁棒性。
在预测校正再入制导方法中,根据轨迹预测方法的不同,可分为数值预测校正和解析预测校正2类。数值预测校正制导方法一般计算量较大,但随着星载计算机性能的大幅提升,由于其计算的准确性及方法的鲁棒性能成为研究热点。在低升阻比飞行器上,Putnam[6]、Brunner[7]和Lu[8]等开展了相关研究。
解析预测校正制导方法是指在一定的假设条件下,求解运动微分方程,推导得到再入运动状态的解析表达式。相较于数值预测校正制导方法中以微分形式表达的运动模型,得到的再入运动解析解更为简单,根据解析表达式中的自变量取值和制导指令剖面形式,无需数值积分即可快速得到飞行器后续轨迹参数。但解析预测校正制导方法大部分是针对特定飞行任务,不同的假设和再入问题,推导出的解析形式可能差别很大,较数值预测校正制导方法适应性更弱。由于解析预测校正制导方法在计算速度上的巨大优势,在轨迹优化、在线制导等领域仍然有较大的应用空间。
国内外在星载计算机性能受限时,开展了大量解析方法的研究工作。针对火星再入制导问题,Tigges和Ling[9]推导了再入运动解析解,并基于解析解设计预测校正再入制导方法。Kluever[10]从匹配渐进展开法得到的闭式解出发,预测跳跃式再入航程,并迭代升阻比在纵向的分量,得到满足航程需求的再入轨迹。Pan等[11]以高超声速飞行器为研究对象,利用李雅普诺夫人工小参数方法推导了再入轨迹的解析解,在考虑纵向和横向机动要求下进行了制导仿真。
本文瞄准载人探月飞船应急条件下的再入返回问题,以降低应急返回时的过载为目标,结合解析预测校正制导方法的优势,开展了飞船应急返回再入制导方法的研究。首先,从拟平衡滑翔思想出发,引入飞船滑翔再入概念。然后,通过设定再入过程中滑翔段的轨迹形式,利用轨迹参数描述滑翔段轨迹,推导出预测航程的解析公式。根据预测航程与实际待飞航程的偏差,利用试位法校正轨迹参数,使终端误差满足要求,并根据轨迹参数与倾侧角的解析关系换算得到倾侧角控制指令。最后,通过仿真验证了本文方法的有效性。
1 飞船再入问题建模
1.1 再入动力学模型
在圆球并考虑其自转的假设下,航迹坐标系下以高度为自变量的飞船再入运动方程为[12]
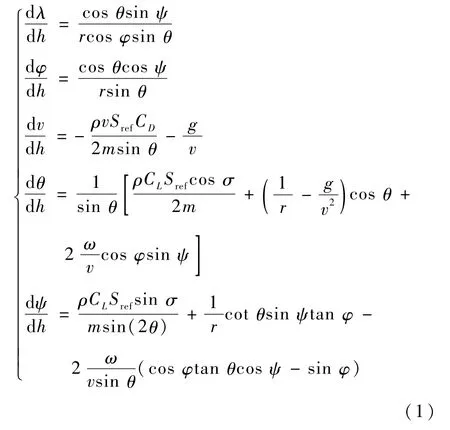
式中:λ和φ分别为地心经度和地心纬度;v为相对地球的速度;θ为当地速度倾角;ψ为速度方位角;r和h分别为地心距和飞行高度;σ为控制量倾侧角;m和Sref分别为飞船质量和参考面积;CL和CD分别为飞船的升力系数和阻力系数;g为引力加速度;ω为地球自转角速度;ρ为大气密度。
大气密度采用指数模型,密度随高度的表达式为

考虑到飞船的计算机性能限制和在线制导要求,飞船制导采用解析预测校正制导方法,充分利用解析形式在计算速度上的优势。首先为推导得到形式较为简单的再入运动解析解,提出如下假设:
1)假设地球引力变化受高度影响可以忽略,地球的引力加速度视为常值,g=g0=9.81m/s2。
2)飞船的气动系数在一定范围内可以视为常值,不随马赫数、迎角变化。
3)假设飞船在整个再入过程中当地速度倾角θ较小,即sinθ≈θ,cosθ≈1。
4)飞船按照配平攻角飞行,在瞬时平衡假设下,倾侧角是唯一的制导参数。
5)地球自转产生的惯性力影响较小,在解析解推导中忽略自转影响。
1.2 滑翔再入阶段划分
相比于近地轨道飞船再入,探月飞船再入时具有更大的速度,这使得飞船再入时可以获得更大的气动力来控制质心运动。飞船进入大气后,随着大气密度的迅速增大,通过调整倾侧角,改变气动力在纵平面内的分量,维持飞船滑翔飞行。飞船采用滑翔再入方法的轨迹形式能够保证飞船被大气所捕获,相比于跳跃式再入方式,在高度上不存在跳跃,且航程更短,有利于减小再入过程中惯导误差的累积。
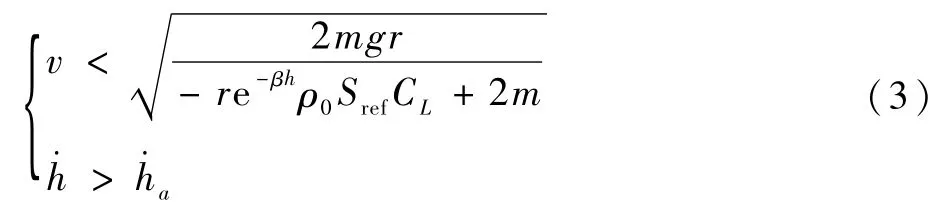
整个再入过程从再入点到开伞点被划分为3段:初始下降段、滑翔段和末段。参考Lu[13]的拟平衡滑翔思想,以飞船能否保持平衡滑翔飞行作为飞船再入的阶段划分标准。当飞船在某个状态下,通过改变倾侧角指令也无法使得飞船实现=0,则可以认为飞船不具备滑翔能力。这种状态分为2种情况:

结合运动方程第四式,得到式(3)满足时,可以认为飞船能够保持平衡滑翔飞行状态,开始由初始下降段过渡到滑翔段。
当式(4)满足时,则可以认为飞船不再能够保持平衡滑翔飞行状态,并开始由滑翔段过渡到末段,此时速度倾角幅值较大,并不能忽略。

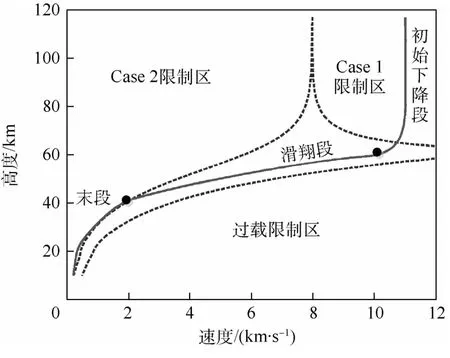
图1 探月飞船滑翔再入阶段划分Fig.1 Lunar spacecraft glide reentry phase division
图1给出了飞船滑翔再入阶段划分的示意图。可以看出,在初始下降段飞船气动力较小,不足以支撑滑翔飞行,飞船高度单调下降,速度略有上升后随高度下降。滑翔段飞船在一定高度范围内保持滑翔飞行,飞船受到的气动阻力较大,飞船能量快速耗散,速度迅速减小。末段是飞船再入的最后阶段,飞船速度较小,气动力无法维持飞船滑翔飞行,在重力作用下,飞船的速度倾角幅值快速增大,高度迅速下降。
2 滑翔再入轨迹设计
结合飞船滑翔再入各阶段的飞行特征,在初始下降段,飞船气动控制能力较弱,倾侧角设计为常值,即

式中:σid为初始下降段中的倾侧角;σ0为初始下降段中既定的倾侧角幅值大小。
在滑翔段,飞船轨迹形式多样,通过简单的倾侧角指令剖面形式难以推导得到飞船运动的解析解。因此,为更好描述滑翔段的飞行轨迹,有必要重新设计一个参数。通过预先设计飞船的再入轨迹形式,再根据飞船的轨迹形式反推其对应的倾侧角指令。
根据动力学方程式(1)中当地速度倾角θ的微分方程在忽略科氏力后得到

式中:

设方程(6)的右端函数为Γ(v,h):

则式(6)转变为

若Γ(v,h)始终小于0,且起滑点处的当地速度倾角小于0,则整个滑翔段的当地速度倾角都将小于0,从而保证飞船高度在滑行段单调下降,其逻辑关系如下:

在滑翔段气动升力占据主导作用,根据式(8)中Γ的表达式,通过设计倾侧角幅值,可构造函数Γ(v,h)为

即设计飞船的轨迹形式为

式中:μ为既定的轨迹参数。
在式(12)构造的函数中,指数函数恒正,参数μ的符号即决定了函数Γ(v,h)的正负。当μ为正数时,当地速度倾角θ将单调递减,可以保证飞船在高度不发生跳跃,高度保持单调下降,确保航天器被大气捕获。
在末段,设计飞船轨迹形式与滑翔段遵循相同变化规律,滑翔段和末段分别通过轨迹参数μ1、μ2规划剖面,轨迹参数在这2个阶段中为常值,但各阶段之间的轨迹参数取值不同,且末段的轨迹参数大于滑翔段轨迹参数。
制导系统需要的是倾侧角变化规律,因此需要将轨迹参数换算到对应的倾侧角指令。对比再入运动方程(1)中的当地速度倾角微分方程和设计的轨迹形式(12),可以得到轨迹参数与倾侧角的换算关系式(13)。可以看出,求解制导指令σ与过程中的状态量密切相关,需要在过程中实时求解。
滑翔再入轨迹设计任务即从设计倾侧角的变化规律,变为选择合适的初始下降段常值倾侧角σ0、滑翔段轨迹参数μ1、末端轨迹参数μ2以满足相关任务需求。通常可选择固定式中1个参数,只改变另外2个参数,可以转化为两参数搜索问题。考虑到初始下降段飞船飞行时间较短,因此变为固定初始下降段倾侧角σ0,搜索满足任务需要的轨迹参数组合(μ1,μ2),如图2所示。
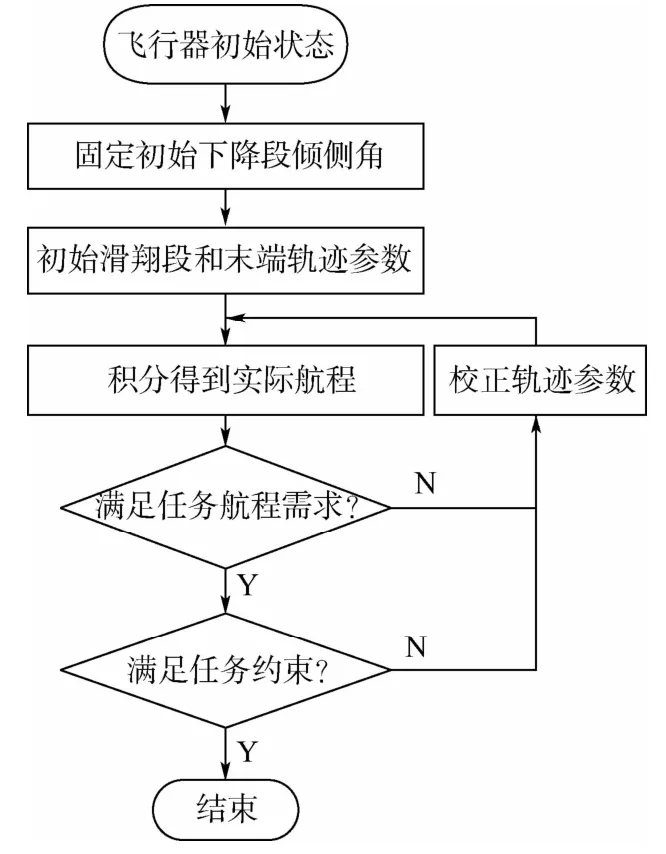
图2 轨迹参数搜索流程Fig.2 Flowchart of trajectory parameter search
3 制导方法
探月飞船滑翔式再入的纵向航程相对较短,侧向机动能力更弱,纵侧向运动的耦合不深,因此,更适合纵侧向分离的制导方式。考虑在纵向制导上,基于解析解对再入纵向轨迹进行规划,根据预测的轨迹航程校正制导参数,以满足纵向相关参数需求;在侧向制导上,利用侧向漏斗,通过控制横程和横程变化率,将再入终端横程控制在一个较小的范围内[14]。一个预测周期内的再入制导流程如图3所示。
因为初始下降段气动力较小,控制能力较弱,本文中选择初始下降段不进行制导,按照常值倾侧角飞行,积分运动方程可以得到滑翔段起点状态参数,末段和滑翔段遵循相同规律,因此主要对滑翔段制导方法进行研究。
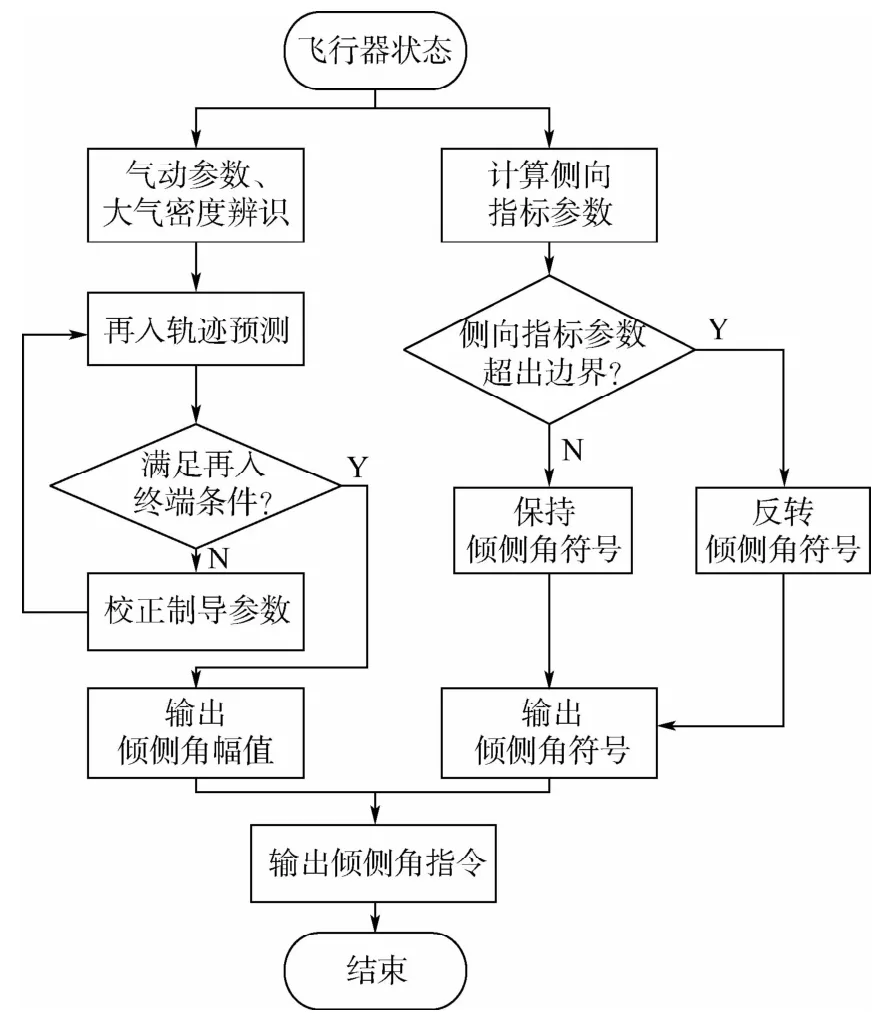
图3 预测校正制导方法流程Fig.3 Flowchart of predictor-corrector guidance method
3.1 滑翔再入预测校正制导方法
解析预测校正制导方法着眼于每个时刻的实际轨道对应的落点与理论设计落点的误差,根据这一误差值和加热量限制及过载限制产生控制指令,具有计算速度快、易于执行的优点。在本文中,预测校正制导方法需要对飞船的待飞航程进行预测,与实际待飞航程形成误差指令,校正相关制导参数。
飞船的待飞航程Stogo对高度的微分满足:

可知,飞船再入航程与飞船的当地速度倾角相关。再入过程中,速度倾角较小,根据假设得到

因此,只需要得到速度倾角的解析表达式,就能积分得到预测航程的计算公式。根据滑翔段设定的轨迹形式(12),积分得到速度倾角与高度的关系式:

积分式(15),代入当地速度倾角的解析表达式,可得到预测滑翔段待飞航程的表达式为

式中:ht和hf分别为飞船当前高度和飞船的滑翔段终端高度。
速度作为滑翔再入阶段划分的关键因素,根据再入运动方程(1)中速度微分,滑翔过程中,阻力加速度远大于重力的影响,因此忽略重力得到

解该微分方程可得到

式中:Πgf为积分常数,其表达式为

其中:vgf0为滑翔段起点的速度。
根据飞船的当前状态及制导参数指令,即可通过式(17)预测飞船的滑翔段待飞航程。整个再入过程的预测待飞航程为滑翔段和末段的预测航程之和,飞船在这2个阶段遵循相同规律,只是轨迹参数的取值不同。
再入终端航程误差δS满足:

试位法校正的基本原理为:提前试位得到制导参数x1和x2,使得

并通过式(23)求得新的制导参数:

通过轨迹预测进一步求得δS(xtmp),并根据δS(xtmp)的符号判断用{xtmp,δS(xtmp)}替代{x1,δS(x1)}或者{x2,δS(x2)},最终使得δS(xtmp)能够满足精度要求。根据校正后的轨迹参数μ及μ与倾侧角σ的关系,换算得到倾侧角控制指令σc0。
3.2 滑翔再入过载控制


式中:Δng为给过载控制预留的控制裕度。
对倾侧角的调整公式为
式中:σc0为由预测校正再入制导方法输出的倾侧角控制指令;σc1为经过载控制后输出的倾侧角控制指令;kng为反馈增益系数,在本文中取-0.5;为飞船实际过载。
4 仿真验证
为验证本文的滑翔式再入预测校正制导方法的有效性,以CEV为参考飞行器,通过最大偏差仿真进行验证。飞船的质量m为9 500 kg,参考面积Sref为23.8 m2,飞船的升阻比L/D范围为0.28~0.47,在马赫数Ma=1.4处取到最大值,气动系数通过线性插值得到。再入任务参数设定如表1所示。
基于预测校正的再入制导方法不依赖参考轨迹,即使在误差条件下,制导方法也需要根据任务需求在线规划生成轨迹,并基于该轨迹进行预测,调整制导参数满足任务要求。在标准条件下,进行仿真,结果如图4~图7所示。
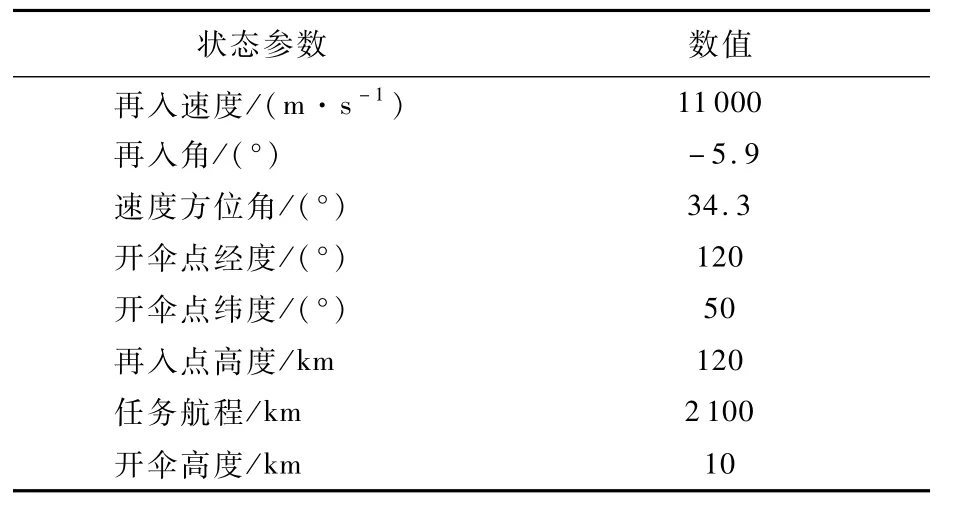
表1 再入点初始状态和任务参数Table 1 Reentry initial state and mission parameters
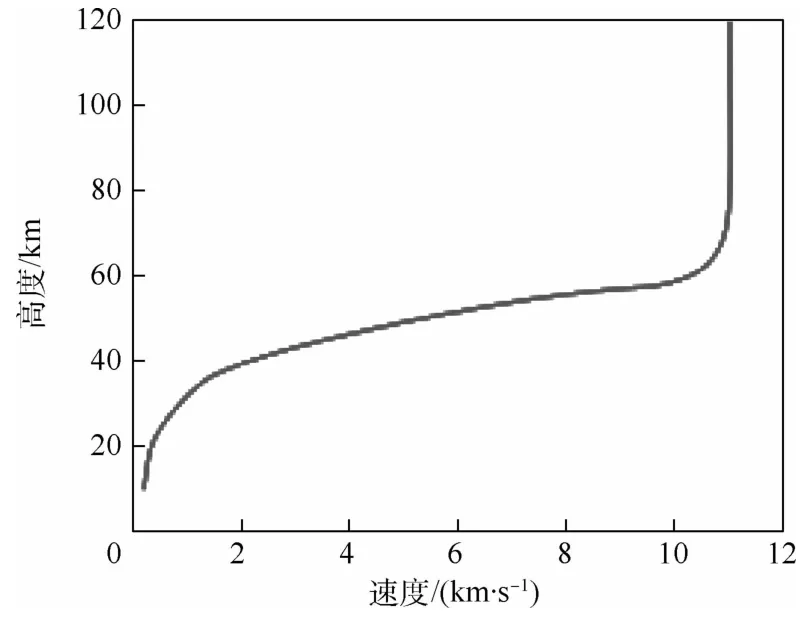
图4 高度-速度曲线Fig.4 Height vs velocity
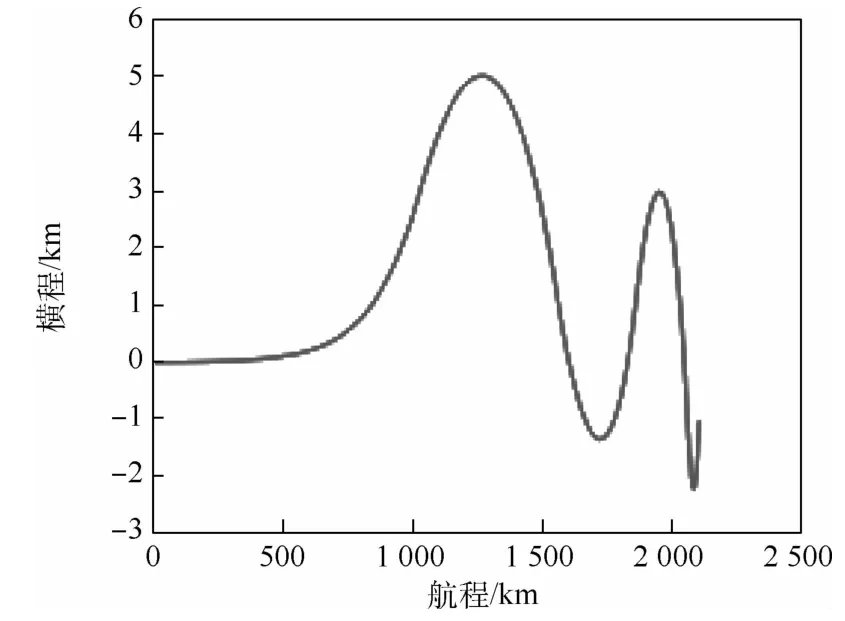
图5 横程-航程曲线Fig.5 Crossrange vs downrange
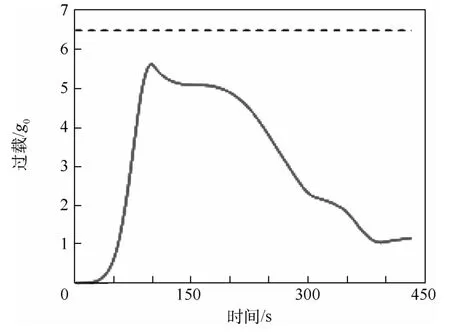
图6 过载-时间曲线Fig.6 Load vs time
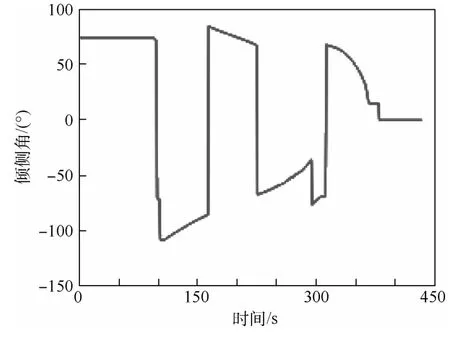
图7 倾侧角-时间曲线Fig.7 Bank angle vs time
图4~图7给出了飞船在标准情况下再入后经基于解析解的预测校正再入制导方法导引后的再入轨迹各项参数的曲线。图4给出了再入轨迹的高度-速度曲线,可以看出,飞船再入轨迹平滑,在高度上没有跃起。图5给出了飞船横程-航程曲线,即飞船的地面轨迹图,可以看出,飞船侧向机动较小,主要在纵向平面内运动,再入终端的航程和横程误差能够满足任务要求。图6给出了过载变化曲线,采用滑翔再入方案,过程中的峰值过载较小,但在峰值附近停留的时间较长,整个再入过程用时约430 s。图7为倾侧角随时间的变化曲线,可以看出,整个再入过程中倾侧角指令在阶段内保持连续变化,较为平滑;在侧向逻辑作用下,倾侧角总共翻转4次;飞船在10~20 km 高度,保持零倾侧角姿态准备开伞。
为验证基于解析解的预测校正再入制导方法的有效性,考虑再入点初始状态偏差、过程气动系数及大气密度偏差的影响,进行单项最大偏差仿真,偏差条件设置及得到的统计结果如表2所示。可以看出,终端航程误差均在-2~+4.5 km,终端横程误差在±3 km之内,满足飞船再入精度需求,但较于数值预测校正制导方法的精度和适应性更低[15]。偏差条件下,整个再入过程过载均小于6.5g0,飞行时间保持在400~450 s内,即飞船能够保持较低的过载水平实现短航程快速再入。仿真结果中,最大过载6.31g0对应再入速度倾角存在负偏差的情况,对比正速度倾角偏差的过载5.72g0可知,飞船为避免出现较大过载,应当以较小的速度倾角返回。相比于应急情况下直接弹道式再入方式,利用本文方法能够有效地实现降低应急返回过程中的过载水平,在保证安全和着陆精度的要求下实现快速返回。
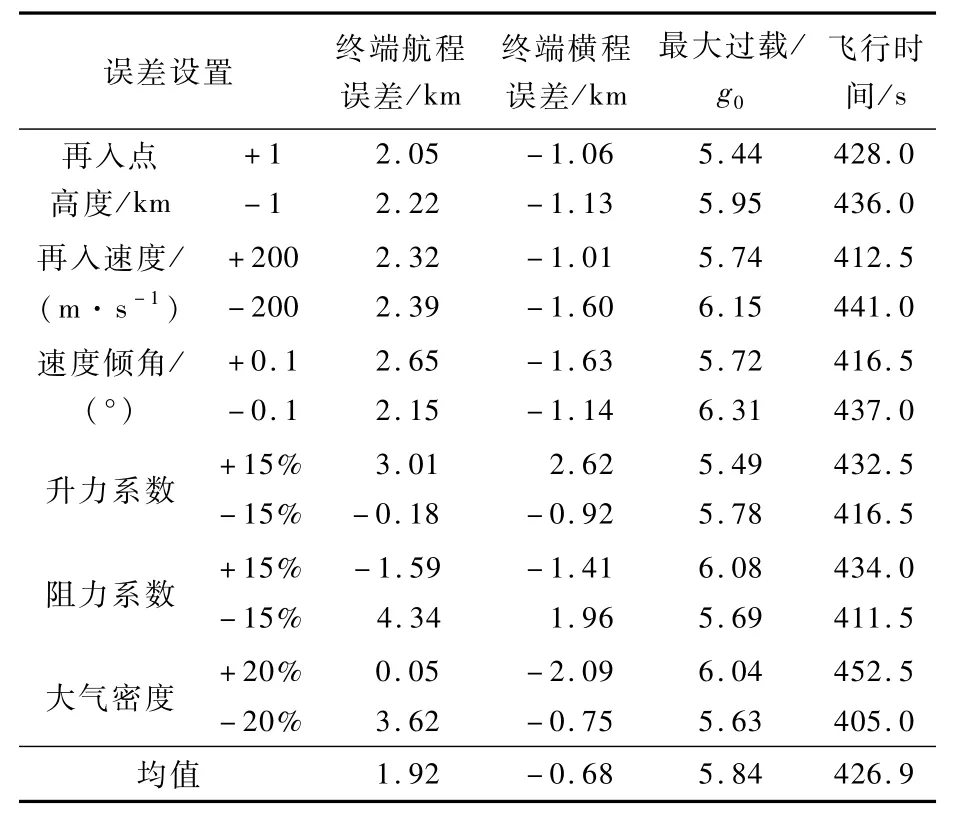
表2 航程2 100 km 偏差条件下制导结果Table 2 Guidance results with deviation(Range 2100 km)
5 结 论
本文提出一种短航程低过载的再入轨迹实现方法,引入飞船滑翔式再入的概念,对探月飞船再入轨迹进行了设计。主要结论如下:
1)探月飞船再入时具有较大的速度,能够通过气动力控制实现拟平衡滑翔。滑翔再入阶段划分为初始下降段、滑翔段和末段,各段保持不同的飞行特征。
2)给出了滑翔再入的轨迹设计方法,通过选择合适的初始下降段倾侧角和滑翔段轨迹参数,以满足不同任务航程需求,但适应航程范围有限。
3)仿真结果表明,对于探月飞船应急情况下短航程返回方式,整个过程的过载均未超出约束,本文基于解析预测校正的探月飞船滑翔再入的制导方法行之有效。
本文提出的飞船短航程再入制导方法依然存在一定的局限性,一方面由于引入了平衡滑翔等假设,设计出的再入轨迹形式较为固定,方法的适用范围较为局限;另一方面,航程预测精度较数值预测校正更低,误差条件下的制导精度有待提高。