输入饱和情形下战斗机大机动动态面控制
2021-03-26周章勇邵书义胡伟
周章勇,邵书义,胡伟,2
(1.南京航空航天大学 自动化学院,南京211106; 2.国营芜湖机械厂,芜湖241007)
随着近年来航空科技的不断进步,先进的航空武器装备逐渐成为现代战争制胜的关键。大机动飞行技术可以显著提高战斗机的突防能力、机动规避能力以及飞行员的空战效率。战斗机在进行大机动飞行时能迅速获得机动性优势进而率先进入攻击位置,对于赢得近距格斗以至最终掌握制空权有着重大意义。
目前国内外学者在大机动飞行控制领域已经取得了丰硕的研究成果。Brinker和Wise针对大机动飞行控制系统设计了动态逆控制律[1]。文献[2]在动态逆控制律基础上,引入了表征期望飞行品质的理想参考模型,实现大迎角机动控制。文献[3]针对战斗机大机动飞行时出现的模型严重非线性和参数不确定性问题,提出了基于径向基(Radial Basis Function,RBF)神经网络的自适应Backstepping控制方法。文献[4]针对一类反馈型非线性系统,提出了一种控制方法,在系统低阶的情况下,保证系统所有状态即控制信号都有界。文献[5]针对飞行器在大机动飞行过程中气动参数不确定、外部未知干扰因素较多及系统建模可能存在误差等问题,设计了一种基于RBF神经网络的非线性自适应反演控制器。文献[6]将滑模制导律和动态面控制法结合,提出了一种导弹自动驾驶仪性的制导控制。但文献[1-6]未考虑输入饱和情形下的大机动飞行控制问题。战斗机在进行大机动动作时,不可避免地会要求各控制舵面输出较大的偏转,然而各控制舵面受到物理器件约束,其偏转角度是有限的,这将导致控制系统输入出现饱和非线性现象。饱和非线性会降低战斗机的飞行品质,甚至会使飞行系统失去稳定性。现有方案在解决输入饱和问题时常常引入干扰观测器对饱和非线性误差进行估计。文献[7]提出了一种同时处理输入饱和及外部干扰的控制方法,将系统的内部不确定性和外部干扰统一视为复合干扰,在此基础上设计干扰观测器对复合干扰进行估计。文献[8]针对一类带有饱和输入的纯反馈非线性系统,提出了一种基于干扰观测器的直接自适应神经网络控制方法。然而上述方法未考虑在飞行控制领域进行应用研究,且干扰观测器增加了控制器的复杂性。
由于双曲正切函数对饱和函数具有良好的近似作用,可在控制器设计中采用双曲正切函数对饱和函数作近似化处理。文献[9]针对吸气式高超声速飞行器的纵向运动模型,利用双曲正切函数克服了输入饱和问题,同时利用多层神经网络逼近控制律的饱和特性,但未考虑建模误差对系统的影响。受文献[9]启发,本文考虑输入饱和情形,为消除饱和非线性带来的不利影响,在控制器设计中采用双曲正切函数对饱和函数建模,克服输入饱和问题;同时利用多层神经网络逼近控制律的饱和特性,根据饱和受限后的实际控制输入与期望控制输入之差定义新误差变量,并在此基础上设计大机动飞行控制律;在控制律设计时引入鲁棒项消除神经网络逼近误差、外部干扰和建模误差的影响;利用动态面方法避免对虚拟控制器的复杂求导运算;根据Lyapunov稳定性理论证明了闭环系统所有信号的有界性;将所设计的控制器进行仿真证明该方法的有效性,为输入饱和情形下参数的选取开辟了一种新思路,设计的非线性大机动飞行控制系统具有较好的鲁棒性。
1 问题描述
本文的控制目的是实现φ、α、β的跟踪,考虑由φ、α、β、p、q、r、θ构成的战斗机大机动飞行六自由度非线性运动模型[3]如下:
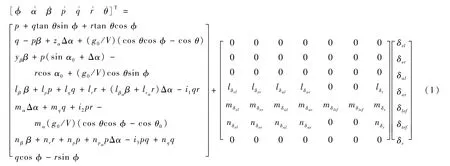

由于受到物理特性约束,飞机舵面的偏转角度是有限的,即控制输入饱和受限。饱和函数u的具体描述如下[10]:
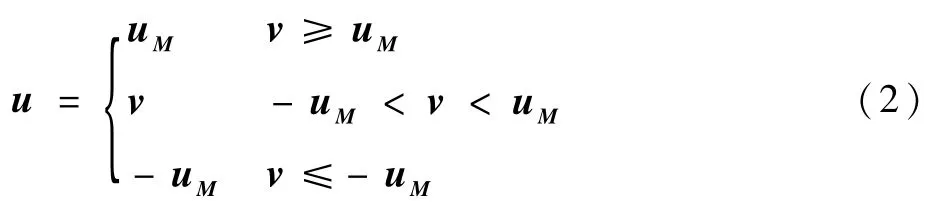
式中:-uM和uM为饱和限幅;v为实际控制律。
由于双曲正切函数对饱和函数的近似作用,可利用双曲正切函数近似处理饱和函数u[11],则

定义建模误差dv(t)=u-h(v),其界限值满足[12]:

考虑外部干扰影响,式(1)可改写为


假设3[11]饱和函数u的上界uM已知。
引理1RBF神经网络[15]为一个线性参数化的神经网络,其能以任意精度逼近任何连续非线性函数f(Z),则

式中:输入向量Z∈Rn,n为神经网络的输入维数;W*∈Rl×3为最优权值矩阵;ψ(Z)∈Rl为KBF函数构成的回归向量,l>1为神经网络的节点数;ε(Z)∈R3为神经网络的逼近误差且满足[16]:

其中:ε*为未知正数。
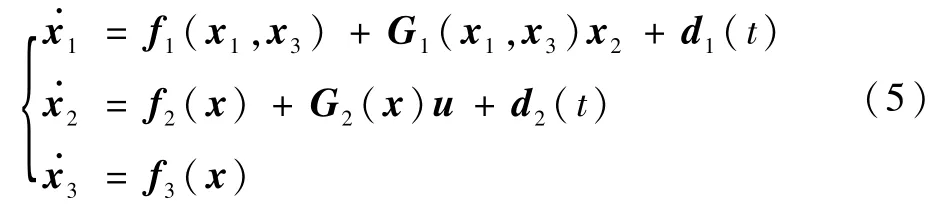
本文的控制目标为:针对输入端饱和受限的大机动飞行系统(5),设计控制律v使得姿态角跟踪误差能够收敛到原点附近的任意小邻域内。
2 控制器设计
引入跟踪误差状态变量如下:

设计过程共包含3步。步骤1~步骤2设计期望虚拟控制律αi(i=1,2),再以αi为输入通过一阶滤波器得到αi+1f。如果不考虑系统的输入饱和问题,设计过程只需包含2步,即u=α2。由于实际输出的舵面偏角具有饱和非线性特性,在此利用线性的双曲正切函数h(v)逼近舵面偏角,本文在传统Backstepping设计的基础上定义e3为双曲正切函数h(v)与期望的虚拟控制输入α2之间的误差,并在步骤3设计能使整个系统稳定的实际控制律v。
步骤1对式(9)中e1求导可得

采用RBF神经网络逼近未知函数f1(x1,x3),并代入式(10)有

构造虚拟控制律及自适应律如下:
Backstepping控制方法由于需要对虚拟控制律进行复杂微分计算,会不可避免地造成“微分爆炸”问题[17]。为减少控制器的计算量,本文采用动态面控制技术。将信号期望虚拟控制律信号α1通过一个一阶滤波器,滤波器的输出为α2f,时间常数为τ2[13]。

可见


考虑x2=e2+α2f和y2=α2f-α1可得

将式(12)和式(18)代入式(11),有

根据假设2和式(8)可得


式中:ζ1为虑拟控制律设计参数。
步骤2沿着式(9)对e2求导可得

采用RBF神经网络逼近未知函数f2(x),并代入式(23)有

式中:ε2为神经网络重构误差;为最优权值矩阵;ψ2(x)为RBF函数。
构造虚拟控制律及自适应律如下:
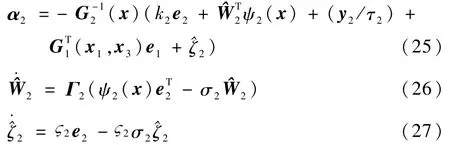
将信号α2通过一个一阶滤波器,滤波器的输出为α3f,时间常数为τ3[10]。

式中:M2为最大值顶;B2(·)为闭区间连续函数。
考虑dv(t)=u-h(v),e3=h(v)-α3f和y3=α3f-α2可得

将式(25)和式(30)代入式(24),有
根据假设2及式(4)和式(8)可得


式中:ζ2为虚拟控制律设计参数。
步骤3沿式(9)对e3求导可得

构造实际控制律如下:


将式(35)代入式(34),有

3 稳定性分析
1)对于∀t>0,V(t)≤ω成立并且闭环系统所有信号半全局一致终结有界。
2)通过选取合适的设计参数,跟踪误差e1=x1-xr能收敛到原点的任意小邻域。
证明定义Lyapunov函数如下:
式中:tr{·}为矩阵对角线元素之和。
考虑式(22)及式(33)和式(36),对式(37)求导可得
将式(18)和式(29)代入式(40)可得
由Young不等式可得
将式(42)代入式(41)可得
考虑到G1(x1,x3)和G2(x)为已知有界函数,选 择 足 够 大 的k1、k2、k3和 足 够 小 的τ2、τ3满足:
将式(44)代入式(43)可得

式中:

对式(45)两边积分,然后化简得



由式(47)可知,调节设计参数减小C3值可以使跟踪误差e1收敛到任意小,即系统输出y能够收敛到期望的大机动指令xr的任意小邻域内,实现了指令姿态角φ、α、β的跟踪。因此定理1的性质2)得证。证毕
4 仿真分析
飞行仿真进入条件为:高度40 000 ft(1 ft=0.304 8m),速度0.6Ma,各作动器的饱和限幅为±20°。选取初值:α=9.29°,θ=8.29°。选择设计参数:k1=k2=k3=10,σ1=σ2=1,1=2=1,τ2=τ3=1和Γ1=Γ2=diag{0.5}。选择RBF神经网络的基函数为高斯函数,则

选择RBF神经网络:ψ1(x1,x3)包含l=11个节点,并且中心值μi(i=1,2,…,11)均匀分配在区间[-10,10]×[-10,10]×[-10,10]×[-10,10]上,宽度 i=2(i=1,2,…,11)。ψ2(x)包含l=11个节点,并且中心值μi(i=1,2,…,11)均匀分配在区间[-10,10]×[-10,10]×[-10,10]上,宽度 i=2(i=1,2,…,11)。
设计以下2种方案进行对比仿真:
方案I:不考虑补偿建模误差dv(t)。
方案II:考虑补偿建模误差dv(t)。
通过比较图1~图3中的指令姿态角(滚转角、迎角、侧滑角)的跟踪曲线可以看出,基于本文中的控制器,滚转角、迎角、侧滑角迅速跟踪指令信号,动态响应效果较好,误差较小,再对饱和函数的建模误差进行补偿可以更好地跟踪期望的指令姿态角。
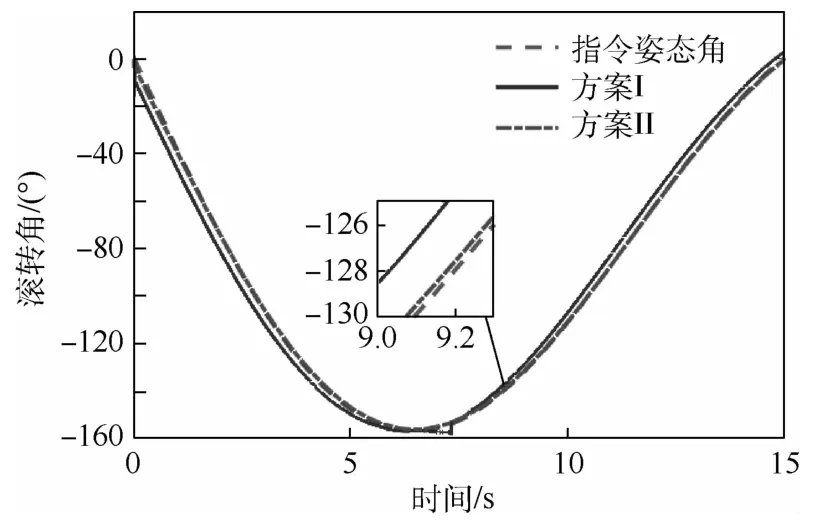
图1 滚转角响应曲线Fig.1 Roll angle response curves
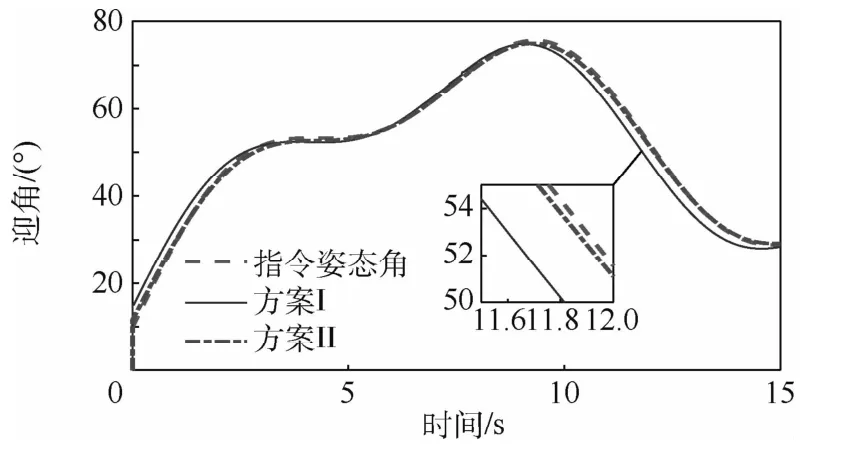
图2 迎角响应曲线Fig.2 Attack angle response curves
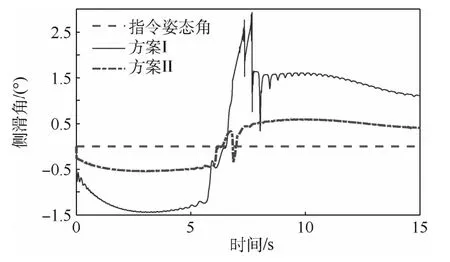
图3 侧滑角响应曲线Fig.3 Sideslip angle response curves
从图4可以看出,在输入饱和的情形下,在方案II下,大机动飞行时各个舵面变化均在限幅之内,未进入饱和状态,同时达到了稳定性要求和跟踪性要求。
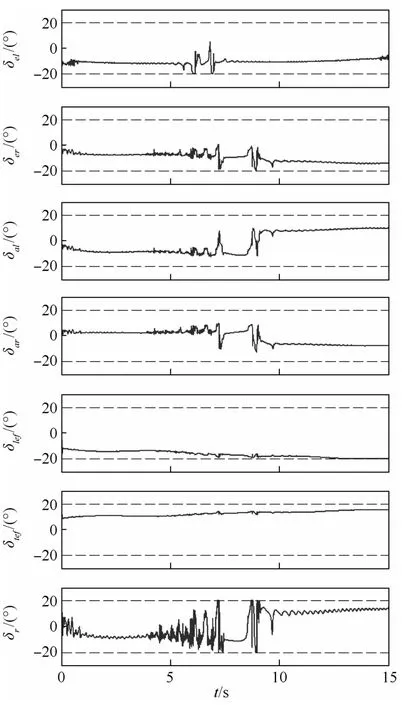
图4 控制舵面偏转仿真结果Fig.4 Control surface deflection simulation results
5 结束语
本文针对输入饱和大机动飞行控制问题,提出了一种自适应神经网络控制方法,利用双曲正切函数近似化处理饱和函数,根据饱和受限后的实际控制输入与期望控制输入之差定义新误差变量,在控制律设计中引入鲁棒项消除神经网络逼近误差、外部干扰和系统建模误差带来的影响,利用动态面控制技术避免对虚拟控制器的复杂求导运算。控制律设计简单、易于实现。通过大机动仿真可以看出,本文方法具有较好的鲁棒性和稳定性。
需要指出的是,在动态仿真算例中,出现的部分区域的高频振荡后续将结合工程应用进一步研究。
