腰部推顶牵引治疗装置控制系统研究
2021-03-25严泽宇喻洪流
严泽宇,喻洪流
(1.上海理工大学康复工程与技术研究所;2.上海康复器械工程技术研究中心;3.民政部神经功能信息与康复工程重点实验室,上海 200093)
0 引言
腰椎间盘突出症病因主要是长期外力损伤以及自身免疫调节功能失衡,出现无菌性炎症,继而导致神经根局部粘连、瘢痕增生、外膜增厚,导致腰椎病变[1]。腰椎间盘突出症患者10%~15%存在腰腿痛,是骨科常见病和多发病[2]。腰椎间盘突出症治疗分为手术治疗和非手术治疗两种。手术治疗通过摘除髓核解除对神经根的压迫,缓解疼痛,但会对身体造成一定的创伤,术后恢复时间长,费用相对高[3-4];非手术治疗方法有牵引治疗、针灸治疗、药物治疗、手法治疗等[5],其原理是采用非创伤手段,通过物理疗法或药物、针灸对患处进行减轻痛感治疗。在腰椎间盘突出症患者中,85%~90%的人经过积极适当的非手术疗法即可恢复正常[6],其中大多数可在6 周内获得满意效果[7]。研究表明,在常规的牵引治疗中增加模拟点法治疗的腰部推顶可以有效治疗急性腰椎间盘突出症,显著缓解患者疼痛感[8-9]。
1 相关研究
对腰椎间盘突出症的治疗装置的研究较多。2019 年翔宇医疗研发了YHZ-IV 型多功能牵引床,该牵引床将人体生理学与机械物理学相结合,采用机械传动、电机进行牵引,能实现8 种不同的牵引模式[10]。在牵引过程中可实现牵引力自动补偿,存储与读取多达20 种治疗方案,是目前市场上较为高端的产品,但此产品缺少腰部推顶治疗项目;美国梅特勒Mettler 公司设计的MTD4000 脊柱减压牵引系统可在患者脊柱减压的同时进行静态或间歇式牵引治疗[11]。牵引过程中患者还可自主控制其牵引或休息时间,可提供不同的牵引方式和多种速度选择模式,设置多种传感器和多项安全控制措施,闭环控制,保证安全性。但此产品牵引维度单一且没有腰部推顶功能。
综合比较国内外现有设备后发现几乎所有的牵引设备都不能进行腰部推顶按摩,无法实现牵引与腰部推顶组合治疗方案。因此,本文设计了一款腰椎推顶牵引治疗装置,利用电机与液压结合的方式完成牵引与腰部推顶结合的治疗。本装置将传统的板法和点法结合起来[12-13],在腰椎牵引过程中增加模拟点法按摩模式,可实现传统牵引床的快速/慢速四维牵引与腰部推顶按摩振幅0~30mm 与频率2~5Hz 可调的五维立体牵引推顶治疗,在多传感器配合下实现牵引力牵引距离角度与推顶按摩的振幅与频率的精准控制,实现推顶与牵引的配合治疗。
本文介绍了腰部推顶牵引治疗装置控制系统的模块化设计和软件设计,并通过样机测试证明控制系统的有效性。
2 总体设计
2.1 机械结构设计
腰部推顶牵引装置是用于腰椎疾病治疗的康复训练系统,该装置把推拿手法中的腰部背伸法、腰部斜扳法、骨盆牵引法等分解为纵向牵引、左右旋转、左右摆角、上下成角和腰部推顶按摩5 个动作。装置设计主要分为头胸板和臀腿板,头胸板靠近臀腿板处为腰部推顶装置,整个床体可以进行纵向牵引,左右旋转、左右摆角、上下成角动作,整体结构如图1 所示,腰部推顶按摩结构如图2 所示。

Fig.1 Lumbar pushing traction treatment device图1 腰部推顶牵引治疗装置

Fig.2 Design drawing and physical object of lumbar pushing device图2 腰部推顶装置设计与实物
2.2 液压控制系统设计
液压系统具有元件布置灵活、结构紧凑、重量轻、控制容易、动作平稳、能实现无级调速、反应速度快、可自动实现过载保护等特点[14]。
腰椎推顶牵引治疗装置液压系统主要由动力元件、执行元件、控制元件、辅助元件和液压油组成。动力元件采用内啮合齿轮泵,能将电动机输出的机械能转化为液体压力能,噪声低、效率高。执行元件有液压缸和液压马达,液压缸用于配合机械结构驱动床体运动。控制元件是各类液压阀,包括换向阀、溢流阀、比例阀、单向阀等,对系统中液体的流量、压力和方向进行控制和调节,如图3 所示。
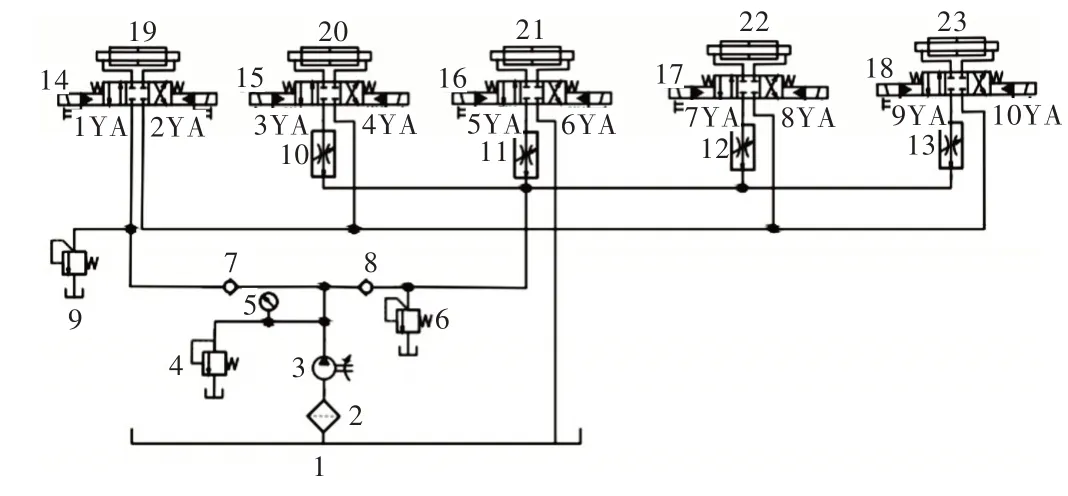
Fig.3 Schematic diagram of hydraulic system图3 液压系统原理
图3 中,液压缸19 执行纵向快速/慢速牵引动作,液压缸20 执行左右摆角动作,液压缸21 执行左右旋转动作,液压缸22 执行左侧腰部推顶按摩动作,液压缸23 执行右侧腰部推顶按摩动作。给液压泵3 通三相电,液压泵3 从油箱1 吸油,溢流阀4 控制系统整体的总压力。节流阀10、11、12 和13 可手动控制开口大小,改变液压缸20、21、22 和23 的流量,调节液压缸动作速度。通过脉宽调制电信号(PWM)调节电控比例阀9 控制油液的压力、流量等参数,并采集压力—位移反馈信号,实现自动精准控制。通过改变电磁铁的通断电控制三位四通换向阀14、15、16、17 和18,变换阀体上各主油口的通断关系,实现牵引换向功能。电磁换向阀是腰椎推顶牵引治疗装置系统控制的主要目标之一。通过控制不同电磁换向阀电磁铁电流的通断来控制不同液压缸的正向运动、反向运动和停止,配合电控溢流阀控制液压缸运行的方向、速度。
液压系统执行纵向牵引、左右摆角、左右旋转、左右腰部推顶按摩和卸荷时对应的电磁铁动作,如表1 所示。其中“+”代表通电,“-”代表断电。

Table 1 Electromagnet action表1 电磁铁动作
2.3 控制系统总体设计
腰椎推顶牵引治疗装置需要完成纵向牵引、左右摆角、左右旋转、上下成角和腰部推顶按摩等动作。为保证系统运行的稳定性和安全性,控制系统采用模块化设计思想,系统主要由电源模块、腰部推顶模块、牵引模块、人机交互模块组成。控制系统总体设计如图4 所示。

Fig.4 General design of control system图4 控制系统总体设计
3 控制系统模块化设计
3.1 电源模块
电源模块主要由强电部分和弱电部分组成。强电部分包括断路器、交流接触器和开关电源,弱点部分主要由电源转化芯片和稳压芯片组成。腰部采用液—电混合驱动方式,其中液压马达采用380V 三相交流电,其余控制系统采用弱电。电源模块先将三相交流电转化为单相电,再经过不同的开关为控制系统各个部件提供所需的工作电压,如图5 所示。

Fig.5 System power module图5 系统电源模块
3.2 人机交互模块
人机交互模块指人与治疗装置之间的交互,治疗装置信息包括牵引力大小、床板运行速度和角度、腰椎推顶速度、频率和压力等信息。本系统采用多种交互方式,包括上位机交互、触摸屏交互、手持控制器交互等。
3.2.1 上位机模块
上位机为医生操作平台,医生可以在上位机上建立患者病历,针对不同患者情况制定处方,本文通过PyQt5 平台开发上位机,并通过RS485 通讯协议与主控板通讯,执行相应的处方治疗方案;记录患者的治疗数据,建立患者个人病历与治疗记录,以供制定后续治疗方案。
RS485 是半双工、多点通信总线,具有接口电平低、支持节点多、传输速率高、抗干扰能力强、传输距离远、通用性和稳定性高的特点[15],本文选用RS485 实现主控板与上位机通讯。RS485 通讯电路原理如图6 所示。本文采用SP3485 低功耗收发器,该芯片支持3.3V 供电,最大传输速度可达10Mbps,支持多达32 个节点,并且有输出短路保护。DE 引脚输入高电平使能发射器,RE 引脚输入高电平使能接收器。禁用时,发射器和接收器输出为高阻抗。SP3485 仅支持半双工通讯,所以在同一时刻只能使能发射器或接收器。在电路设计上,将DE 引脚和RE 引脚取反后短接在一起,实现同一时刻仅有一引脚收到高电平。120Ω电阻为RS-485 匹配电阻,用于抑制通信中的回波干扰。本文设计的Modbus 协议格式如图7 所示。
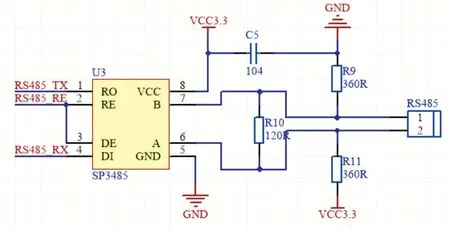
Fig.6 Schematic diagram of RS-485 communication circuit图6 RS-485 通讯电路原理

Fig.7 Modbus protocol format图7 Modbus 协议格式
3.2.2 触摸屏
触摸屏为医生操作平台,通过便携式触摸屏,医生可以在观察病人情况的同时查看记录的实时数据,进行处方修改或保持当前训练模式。触摸屏支持按钮控件、进度条控件、文本控件、指针控件等多种组态控件。结合基本的GUI 指令、串口下载、PC 端模拟调试和上位机编写好的软件,通过蓝牙通讯实现指令交互。
本文采用HC-05 蓝牙模块,该模块性价比高,尺寸小,灵敏度高[16]。通过此模块先将串口输出的数字信号转换为模拟信号在空间传输,再将接收到的模拟信号转换为数字信号送回主控板,其硬件电路如图8 所示。

Fig.8 Bluetooth communication circuit图8 蓝牙通讯电路
3.2.3 手持控制器
手持控制器通过数据线直连主板,为患者手持用,除了开始、结束外,还有一个急停按钮,用于患者紧急停止训练。
3.3 牵引模块
牵引模块由主控板、从控板、驱动模块、电控溢流阀、电磁换向阀、液压缸、光栅尺、拉压力传感器、液压力传感器组成。通过PWM 波调节电控溢流阀的阀芯电机[17],改变阀芯的偏转角度线性改变输出液压力大小,通过液压力传感器和拉压力传感器的反馈修正阀芯位置,维持液压力输出稳定可调。为了得到稳定的牵引力,本文采用PID 控制算法来控制阀芯电机[18]。
3.4 腰部推顶模块
腰部推顶按摩模块包含左、右共两个腰部推顶装置,由主控板2、从控板、驱动板、2 个直流电机、2 个电机、2 个换向阀、2 个液压缸、4 个接近开关、两个磁性开关和2 个压力传感器组成。通过两组电机分别驱动并控制腰部推顶装置的振幅和频率,通过两个液压缸控制上升单元的起始高度,并实现一定推顶高度下的快速推顶动作。
为实现腰部推顶的频率和振幅可调,需要控制直流电机的转速和另外两个电机带动机构运行的位移量。直流电机转速决定腰部推顶的频率,电机机构的位移量决定腰部推顶的振幅。通过同时控制两个直流电机实现两个腰部推顶的交替运动或一起运动。在腰部推顶按摩过程中,针对左右两个推顶装置的控制问题,本系统采用PWM 调压方法改变两个直流电机的电压,通过调压改变电机的转速,改变腰椎推顶频率,实现腰椎推顶频率可调。PWM 工作原理如图9 所示。
从图9 可以看出,当CNT<CCRx 时,IO 逻辑输出低电平0;当CNT>CCRx 时,IO 逻辑输出高电平1,其中CNT 是计数器的值,在定时器时钟源下不断累加。当CNT 的值大于ARR 时,定时器将重新计数;ARR 为自动重装载值,CCRx是定时器所设定的计数比较值。PWM 调压采用XL4013 芯片,调压原理如图10 所示。

Fig.9 The working principle of PWM图9 PWM 工作原理

Fig.10 Schematic diagram of PWM wave voltage regulation图10 PWM 波调压原理
其中R1、R2、R3、R4 和C3 为PWM 调压电路,R1、R2 在电路中起到分压作用,VA 为模拟调压信号,VPWM 为PWM调压信号。VIN 为输入电源,VOUT 为输出电源。按下列公式计算R1、R3、R4 的阻值大小:
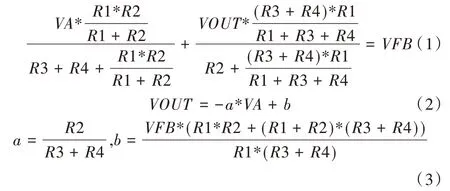
已知VFB=1.25V、R2=20K、C3=105,且外加0~5V 的VPWM 信号,代入上面公式可计算出R1、R3、R4 的阻值。图11 为PWM 占空比与从控板输出的电压值的对应关系。从图中可以看出,PWM 调压值与理论值较相符,且PWM 占空比与腰部推顶从控板输出的电压值成比例关系。

Fig.11 Relationship between PWM duty cycle and voltage value图11 PWM 波占空比与电压值关系曲线
根据计算结果可知输出的可调电压随输入电压的增大而增大。腰部推顶模块需要在腰部推顶治疗过程中改变推顶的频率,因此需要对直流电机进行调速。本文采用PID 控制算法对直流电机进行控制并进行实验验证。PID反馈控制流程如图12 所示。

Fig.12 PID feedback control flow图12 PID 反馈控制流程
4 实验
4.1 牵引实验
结合文献[19-22]医学临床经验得到本文牵引治疗周期如图13 所示。本系统选择3 个治疗周期进行实验。牵引治疗的首个周期时间为90s,其后两个治疗周期为60s。选择体重为50kg 的治疗对象通过PID 参数整定,实验结果如图14 所示。从图14 可以看出,系统输出的牵引力能够较好跟踪设定的牵引力曲线,牵引力的控制误差较小,实验结果满足牵引治疗要求。

Fig.13 Traction treatment cycle图13 牵引治疗周期

Fig.14 Traction curve of PID control图14 PID 控制牵引力曲线
4.2 腰部推顶配合牵引实验
通过上位机控制腰椎推顶装置,设定好预定的频率和振幅,受试者仰卧在装置上,给定一个牵引距离值,在慢速牵引逐渐达到这个距离时牵引力发生变化,牵引速度减慢,此时腰椎推顶介入,幅度由小到大并配合频率的变化。不同受试者结合多种不同的参数设置方案进行,减缓腰椎压力。PID 算法明显改善了两个腰部推顶直流电机的速度控制,提高了直流电机异步运动稳定性。加速、减速情况下推顶位移曲线分别如图15、图16 所示,治疗姿态如图17所示。
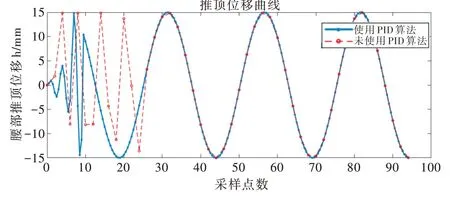
Fig.15 Displacement curve of lumbar pushing under acceleration图15 加速下腰部推顶位移曲线
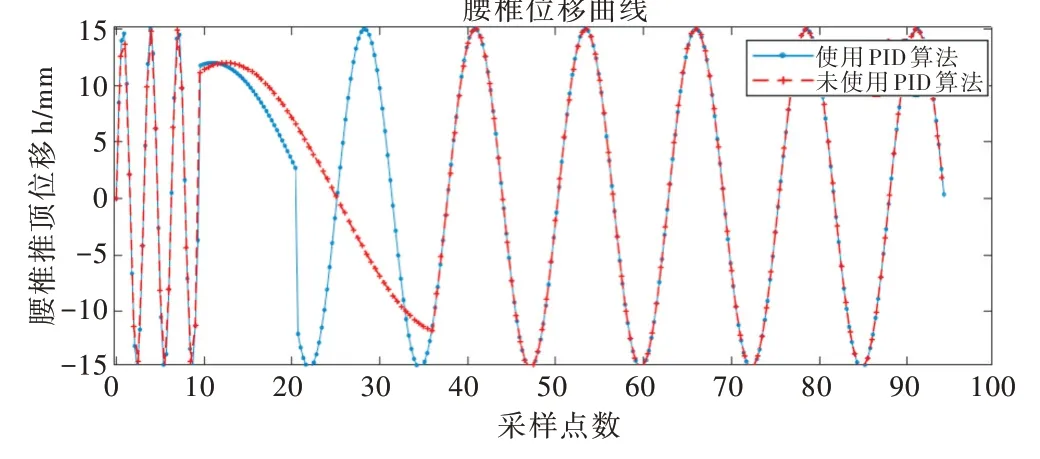
Fig.16 Displacement curve of lumbar pushing under deceleration图16 减速下腰部推顶位移曲线

Fig.17 Treatment posture图17 治疗姿态
5 结语
本文设计了一种新型腰椎推顶牵引治疗装置控制系统,通过电—液混合驱动,可实现稳定牵引与腰部推顶相配合的模拟手法动作,补充现有牵引装置腰部推顶空白。通过PID 算法控制,实现对腰部推顶装置的同步或异步控制,通过RS485 和蓝牙通讯可与牵引模块实现组合运动。目前已制作出实验样机一台,通过实机测试获得相应数据。与之前相比,腰部推顶加速和减速调节时间分别减少了7.75ms 和7.8ms,可以完成模拟牵引配合腰椎推顶的加减速手法动作。但是在实际推顶治疗中,因不同患者治疗的负载不同,有时手法需要保证在不同负载情况下的推顶速度恒定,因此单纯的PID 控制并不能完美满足要求。后续研究要通过优化控制算法,增加系统反馈值,通过多层PID 控制来适应不同负载下的速度控制,达到真正模拟手法的目的。
