一种汽车智能防远光干扰控制系统设计*
2021-03-25张红党杨宏图张凤娇李坤林
张红党 杨宏图 张凤娇 李坤林
(1.常州机电职业技术学院;2.江苏大学汽车与交通工程学院)
随着国内外汽车保有量的快速增长及新驾驶员越来越多,事故发生率不断上升,尤其是夜晚会车或者通过隧道时由于远近灯光操作不当更易造成交通事故。为预防这类道路交通事故的发生,《中国道路交通安全法》实施条例规定:机动车夜间会车“须距对面来车150 m外互闭远光灯,改用近光灯”。但实际行车中很多驾驶员经常使用远光与对方会车,造成对方驾驶员眩目而酿成交通事故,而且这种违规操作很难予以监控或处罚。为了保证晚间行车安全,避免因上述原因引发的交通事故,设计了一种汽车智能防远光干扰控制系统[1]。
1 防远光干扰控制原理
该系统主要由前照灯组件、雷达传感器、车速传感器、光照强度传感器、湿度传感器、车外温度传感器、烟雾检测传感器、坡度传感器、中央处理器、控制器、自动变速器ECU、显示器、指示灯、车载网络数据线(CAN)、电源、安装支架等组成,如图1 所示。

图1 系统控制原理框图
图1示出调光控制原理图。控制原理如下:1)温度传感器用于收集车外的温度信号;2)光照强度传感器用于收集对向车辆远光入射光强度信号;3)控制器用于控制前照灯组件工作;4)雷达探头用于测试对向车辆远光光源距离;5)车速传感器主要检测自身车子的速度;6)湿度传感器通过检测环境中的温度与湿度,检测值通过算法计算得到相应的结果,作为智能防干扰控制的修正信号;7)烟雾检测传感器是将烟雾浓度的模拟量转换成数字量,从而感知环境中的烟雾浓度,芯片根据编写的算法程序判定是否为大雾天气,从而给出是否要切换为近光灯的信号;8)坡度传感器实时监测车体前后倾角数据并判断行驶路面为上下坡路段,作为远光干扰的辅助信号。
2 防远光干扰控制系统的设计
图2 示出系统控制原理实物图。中央处理器结合采集到的光照强度、光照量、温湿度量、车速值、倾角值、雷达测距值以及烟雾浓度量,经过程序算法的处理将得到的结果与设定的阈值进行比较,通过比较结果,系统控制器会向继电器发出一个是否切换的指令信号。当汽车交会结束之后光强减弱,系统控制器会发出指令信号从而控制继电器将灯光由近光切换为远光模式,以此达到近光模式会车的目的。

图2 系统控制原理实物图
3 控制切换电路的设计
夜间会车时,智能远光控制系统将进行远、近光灯自动切换。根据实际情况的验证,夜间两车相对行驶距离为150 m 时,汽车前照灯的最小照度是6 Lux。在无路灯黑暗的道路上,如果对方远光照度大于6 Lux 时,智能防远光干扰控制系统自动将远光模式切换为近光模式,在两车交会结束后,智能防远光干扰控制系统又将近光灯模式切换为远光灯模式。汽车智能防远光干扰控制切换电路示意图,如图3 所示。控制器接收到对面车辆的光照强度信号及其他外部环境信号,将这些信号转换为电信号,经过放大器放大以后将信息反馈到控制器中,控制器就发出1 个电信号控制电磁线圈1接通,将动触头向上吸起,远光灯组电路断开,动触头接通近光灯电路,近光灯组亮,这就实现了远光灯到近光灯的切换;两车相会结束后,驾驶员需要开远光时,控制器就发出1 个电信号控制电磁线圈2 接通,将动触头向下吸起,接通远光灯电路,达到智能远近灯的切换,实现防远光干扰[2]。

图3 系统控制电路示意图
3.1 远光灯硬件设计
智能控制系统远光灯硬件控制设计可以采用低压大电流控制,主要考虑电流阈值和散热问题。采用单片机(BTS6142D)控制远近光切换,工作电压为12 V,正常负载电流为6 A。在实际工作中,远光灯启动时会有较大冲击电流,单片机可以提供保护电流的功能,由于单片机导通电阻为12 mΩ,也要考虑其散热问题[3]。
3.2 系统控制策略
光照强度传感器实时检测光线强度,速度传感器检测出行驶速度,转向盘转角传感器检测转动角度,把这些物理量转化为电信号,发送给控制器进行判断和处理,同时接收车门的开关状态和发动机启动状态的数字量信号,控制器监控灯光的开启状态以及偏转量,最终实现汽车远光灯的智能控制。把车速和转向盘转动角度进行模糊化,根据之前的运算制定相应的模糊控制规则表,通过MATLAB 建立模糊控制表,计算出模糊输出量的清晰值,实现远光灯智能控制。2 车在夜间相会时,如对向车开启远光模式,光敏传感器检测到对向远光灯照射的强度,进行数据采集和处理,把信号发送给控制器,单片机I/O 输出口控制调光电路,控制继电器触点开关切换到近光灯,变换为近光模式[4]。汽车交会时智能防远光干扰控制程序流程框图,如图4 所示。
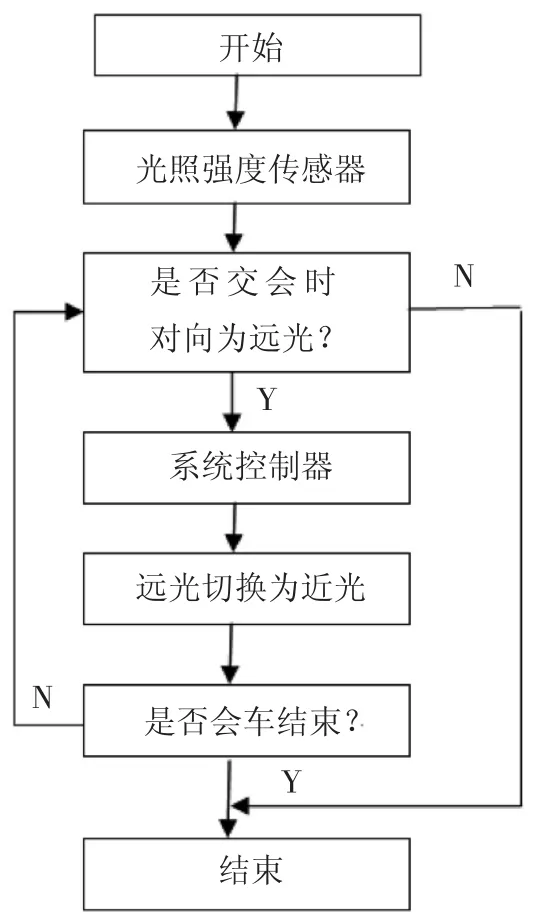
图4 防远光干扰控制程序流程框图
4 结论
该系统的设计,在前方车辆开启远光时,该控制系统通过交替启闭远光灯以提示对向车辆关闭远光,实现了不同行车工况下智能化的远近光切换控制;还可根据光照强度及外部环境的变化,自动切换远近光,减缓驾驶员的视觉疲劳和受干扰程度,保证行车安全,也为汽车智能防远光干扰产品的研发打下基础。
