多因素影响的免像控倾斜模型质量分析
2021-03-24孙保燕张小可黄邦伟姚学杰韦龙华
孙保燕, 张小可, 黄邦伟, 姚学杰, 周 鑫, 韦龙华
(桂林电子科技大学 建筑与交通工程学院, 广西 桂林 541004)
0 引 言
随着科技的进步, 无人机倾斜摄影技术也越来成熟。倾斜摄影免像控的方式一直都备受业内人士的关注, 实现免像控往往受到很多方面因素的影响, 同时对于免像控的倾斜模型质量分析也是行业内讨论的热点。
为实现免像控技术, 航测研究人员对无人机的航线优化、 数据采集方式、数据处理方法等方面都作了改进。 曹爽等[1]使用消费级大疆无人机, 采用不同航线的飞行方式采集了影像数据, 分析了不同飞行方案优越性, 通过倾斜模型检查点的平面精度和高程精度及航线长度精度对模型进行了细致的判定; 马海政等[2]通过高端无人机及动态差分设备实现了大比例的免像控测绘; McCaffrey等[3]使用倾斜摄影技术对高山林线生态区进行实景重建,从而提取树冠覆盖信息, 利用无人机结合激光雷达设备提升了实景模型的精度,能够有效监测树冠生长的周期性变化; Xu等[4]设计了一种倾斜摄影航线的优化算法和模型简化方式, 使得城市的倾斜模型轻量化且保证模型精细质量; 张允涛[5]借助搭载高精度RTK系统的固定翼无人机和智能加密空三的方法来实现免像控拍摄; 张春森等[6]提出了一种顾及曝光延迟的GPS辅助光束法平差方法,通过采用不同控制点个数及布设方案进一步提高了空中三角测量的精度; 周吕等[7]借助Context Capture对倾斜模型刺点以及检查点中误差来分析模型精度问题。
本文使用无人机免像控方式拍照建模, 通过设计均匀试验对无人机航线设置的参数(航向重叠度、 旁向重叠度、 相机角度、 飞行高度)进行了拟合分析并建立数学模型, 用数学模型计算出指定参数的权值与检查点的空间累计误差, 同时拟定了3组检查点的布设方式, 通过模型找出免像控检查点布设方式的优选点。在进行方差分析时, 各组参数之间都有较为明显的相关性, 具有一定研究价值。
1 免像控建模方法
1.1 无人机影像采集
影像数据主要是通过GIS技术、 利用无人机按照规定好的航线飞行进行采集, 结合无人机飞行的姿态数据、 经度、 纬度、 航高、 速度等, 多角度采集目标的影像[8]。Pix4D Capture是瑞士Pix4D公司研发的一款航测数据智能采集软件[9], 它可以根据用户的需求来调整航测的参数, 便于本文试验的实施, 其优势在于可以单航线模拟多任务的效果飞行, 大大提升了数据采集的效率。
1.2 匀色匀光与白平衡处理
在采集影像数据之前, 需要对相机根据出厂检校的内方位元数据和光学畸变的矫正参数进行几何畸变矫正。 图1所示为相机的3种常见畸变方式, 完成光学畸变的矫正式(1)并对影像匀光匀色处理, 确保影像色调、 明暗、 对比度一致, 受制于大气光引起的颜色偏差, 需要设置白平衡式(2)和式(3)来消除影响, 从而进一步提高影像匹配效果[10]。

图1 3种常见畸变类型

(1)
式中:k1、k2、k3为径向畸变系数;p1、p2为偏心畸变系数;b1、b2为像元大小不均匀的情况下x方向的比例因子和非正交性的畸变系数;x、y为像点坐标;x0、y0为主点坐标;r为实际像点的径向距离[11]。

(2)


(3)

1.3 顾及曝光延迟的GPS辅助光束法区域网平差
为得到更加接近真实地表的模型参数, 需要考虑偏移、 漂移、 曝光延迟等因素的影响, 从而实现免像控的基本条件。 建立曝光延迟的区域网平差模型如图2所示。由于传统的光束法区域网平差过分依赖于控制点的选取以及使用高端的无人机, 在考虑曝光延迟可以选择更为方便使用的经济型无人机[12]。

图2 曝光延迟的区域网平差模型

(4)

2 试验流程方法
试验点云所需要的技术处理包括: 试验设计、 数据采集、 匀色匀光、 白平衡处理、 曝光补偿处理、 处理空三数据及数据分析, 所涉及的流程如图3所示。

图3 试验流程
2.1 均匀试验设计
在均匀试验中选择的影响因素为: 航向重叠度(50%~90%)、 旁向重叠度(50%~90%)、 相机角度(45°~85°以镜头指向地面为90°)、 飞行高度(40~90 m), 分为3个方案(图4, 1~9号点位)标记检查点: 方案一, 记录9个点位(1~9)空间累计误差; 方案二, 4个点位(1, 3, 7, 9)点空间累计误差; 方案三, 4个点位(2, 4, 6, 8)空间累计误差。

图4 检查点布设位置

(5)
其中:s为空间累计误差; Δx、 Δy、 Δz分别为3个方向的相对误差。
2.2 飞控参数设置
在规划航线的同时分别调整好9组对应表1的参数来自动拍摄照片数据, 无人机采用大疆精灵4 Pro(相机参数为1英寸、 9 mm焦距), 飞控软件使用的是Pix4D Capture安全模式下中心对焦的方式, 在一定程度上可以模拟五镜头摄像的效果, 大大提升了飞行效率, 节省了大量的时间。 如图5所示, 控制飞行速度都设置为“fast”, 使用自动白平衡模式来排除其他空气质量和环境的影响, 从而主要讨论航向重叠度、 旁向重叠度、 飞行高度、 相机角度4个因素的影响。
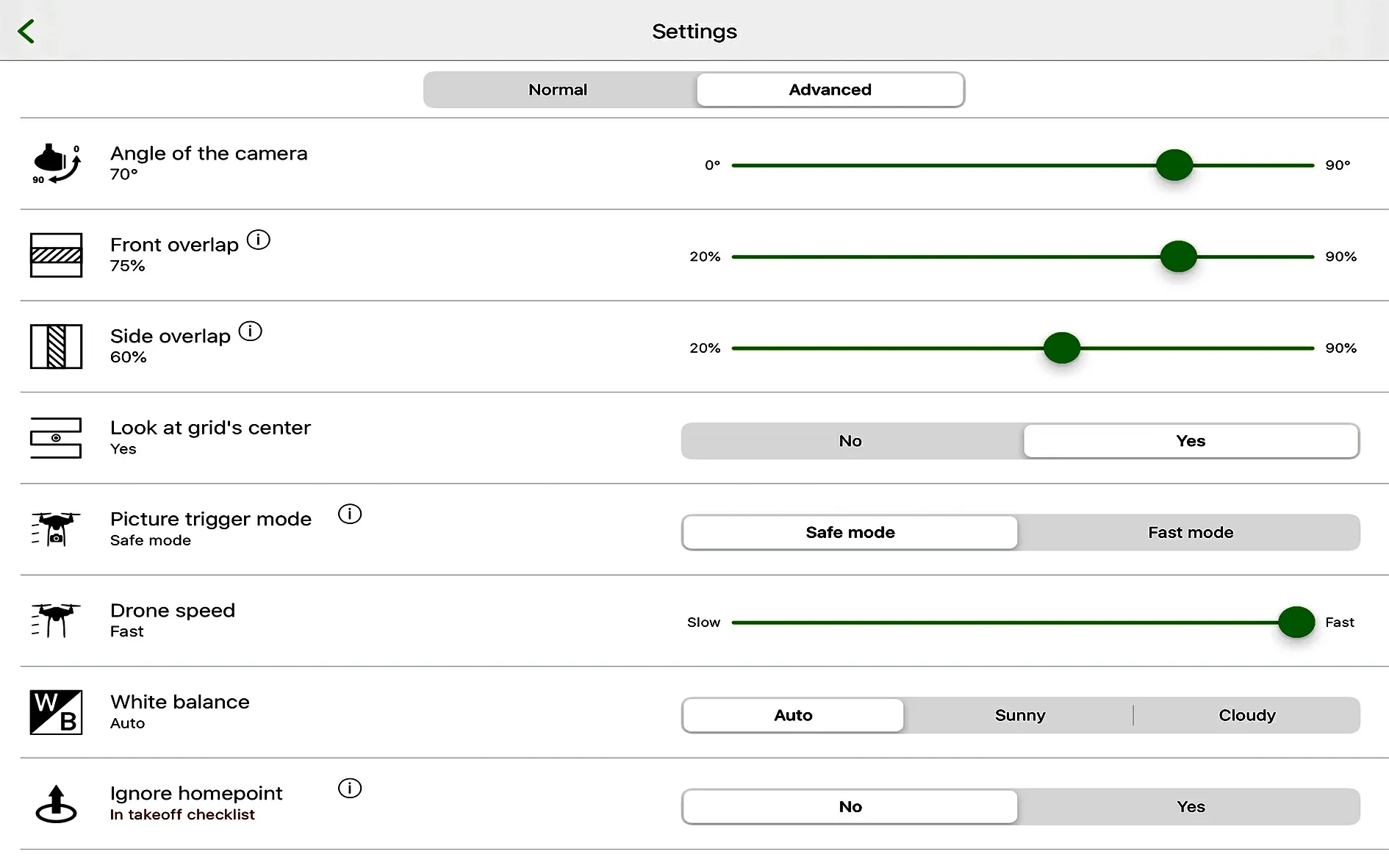
图5 飞控参数设置

表1 均匀试验水平因素表
2.3 数据采集
测区长度约为117 m、 宽度约为89 m, 无人机采集的照片分辨率均为5 472×3 648, 各组采集的数量如图6, 保证所有的影像数据分辨率相同。

图6 各试验的照片数量
2.4 处理数据
按试验组号将照片分别导入软件的区块任务, 进行分块处理带有姿态数据的影像, 随后进行空中三角测量, 计算生成点云数据(图7)重建TIN模型[15], 并记录测定原先布设检查点的坐标和标记点之间的距离。

图7 测区点云图
2.5 数据分析
从空中三角测量报告中可以看到, 平均投影误差、 有效平均重投影误差、 像素坐标和世界坐标的转化公式。由图8可见, 2号试验组的数据各项误差均为最小, 且其照片的数量为13张(图6), 说明影响匹配的质量程度并不随照片数量变化。由于本试验采用的是均匀试验设计法, 在有限的数据量中难以寻找全局模型的最小或最大值点, 因此, 本文采取多元线性回归模型拟合空间累计误差和航向重叠度、 旁向重叠度、 相机角度、 飞行高度的关系。

图8 重投影像素误差
通过表2所示的三维点云的平均连接点误差分析可以看到, 连接点误差均分布在0.010 m左右, 既保证了点云质量的稳定性, 也为方案分析奠定了基础。

表2 三维点云平均连接点误差
2.6 方案分析
如图9所示, 方案一使用“田”字格的9个检查点作为参照对象, 找出各组9个点空间累计误差累计值s; 方案二使用的检查点为(1, 3, 7, 9)4个点方形布置方案; 方案三使用的是(2, 4, 6, 8)4个点菱形位置方案。利用Stata 16软件对参数进行拟合分析, 得到各方案的方差分析结果(表3)。

表3 各方案方差分析

图9 各方案的检查点位布置方案
从方案比选结果(表4)看出, 方案一,R2=0.951 2,调整后R2=0.902 3。 通过方差分析,P=0.006 9和F检验发现方程拟合程度较好, 具有一定统计学意义,能够反映出航向重叠度(x1)、旁向重叠度(x2)、相机角度(x3) 飞行高度(x4)因素之间的联系:其中,y=0.330 1x1-0.254 5x2+0.019 4x3+0.392 9x4-19.418 6,y为计算累计空间误差。方案二,R2=0.951 3, 调整后R2=0.902 6, 只采取4个角点(方形)作参考点的情况下和9个参考点的对比分析发现, 拟合程度较为明显,y=0.148 9x1-0.113 2x2+0.008 4x3+0.174 6x4-8.772 5。方案三,R2=0.950 8,调整后R2=0.901 6,P=0.007 0,只采取4个中点(菱形)作参考点拟合程度也较为明显,y=0.145 4x1-0.113 2x2+0.008 9x3+0.174 7x4-8.549 4。P值最高为0.007 0(表4), 表明方案三拟合程度相对低于方案一、 二。方案一、 二的P值均为0.006 9, 比较调整前后的R2, 方案二拟合效果均较好于方案一。通过对参与拟合的检查点发现, 检查点布置于“田”字格的4个角点的情况下对数学模型的影响权重较大。

表4 方案比选
在上述3个方案中可以看出, 第7组试验各方案拟合误差都较高(表5); 针对第7组试验进行精度分析,误差分析结果见表6; 通过计算x、y、xy、h方向的中误差,并与地理信息模型精度规范限值进行对比(表7),该精度可以满足三维地理信息模型数据产品规范要求的1∶1 000比例尺的限差要求。

表5 计算误差分析

表6 实际误差分析

表7 中误差分析
3 结论及展望
通过均匀试验设计3个方案的比选可见, 各组因素的相关性都较高, 且显著性表现均较为明显。解决了无人机在免像控情况下, 对航向重叠度、 旁向重叠度、 相机角度、 飞行高度的设置问题, 可以根据数学模型进行参数的预调和评估, 满足地理信息三维模型规范的限差要求。本文方案中最优参数组合为航向重叠65%、 旁向重叠度85%、 相机角度75°、 飞行高度60 m, 此时与模型计算误差为3.79%。工作中因无人机设备的飞行时长限制, 在未来的研究中可以对大区域以及无人机飞行姿态数据的影响, 以深入多因素影响的免像控倾斜模型质量进行分析。
