应用于高速离心式鼓风机的磁悬浮轴承系统设计方法
2021-03-24张英哲牛俊卜
张英哲 牛俊卜
(山东明天机械集团股份有限公司)
0 引言
磁悬浮轴承由于不存在机械接触,可以运行到很高的转速,具有能耗低、噪声小、寿命长、无需润滑等优点,特别适用于高速、真空等特殊环境。
磁悬浮高速离心式鼓风机是将磁悬浮轴承技术和高速电机技术融入传统离心式风机而形成的一种高效、环保、节能的新型鼓风机。在国家发展规划节能减排的号召下,高速磁悬浮离心式鼓风机迅速应用到各行各业,包括污水处理、火力发电、钢铁冶金、造纸印染、石油化工、食品医药等[1-2]。
在设计高速磁悬浮离心式鼓风机过程中,涉及到流体、机械、电磁、转子动力学、硬件、嵌入式、自动控制等多个模块的技术融合,因此如何快速且合理地确定每个模块的参数框架是一个值得探讨的问题。
本文就高速磁悬浮离心式鼓风机系统的快速设计进行研究,以某型号风机为例,介绍了如何快速合理地设计高速离心式鼓风机磁悬浮系统的方法和思路。
1 磁悬浮本体系统设计
1.1 叶轮设计
以高速单极直驱离心式鼓风机为例,流体设计的参数要求为用户指定的全压和流量。
与离心叶轮匹配的电机功率需求为:

其中,指定流量Q 为80m3/min,指定全压P 为60kPa,风机级效率η1为80%,电机效率η2为95%,电机功率PM计算得出结果为105kW。
半开式叶轮的线速度u2一般可达到600m/s 左右。本设计中,指定转速n为24 000r/min,为了提高效率,在合理的范围内选择较大叶轮线速度452m/s,此时根据:


表1 流体设计参数Tab.1 Blower design parameters
计算出叶轮出口直径D2为360mm。本设计中出口宽度b2/D2值根据设计经验定为0.04。计算得出出口宽度b2为14.4mm。
根据上文所述。确定所需电机功率、转速等指标。同时可确定大致的叶轮模型进行后续的电机匹配设计。实例风机的流体设计参数见表1。
1.2 电机设计
大功率高速电机的主要设计难点:
1)通常电力电子器件IGBT 的许用电压、电流越大,开关频率越低,输出给电机的控制频率越低。在电机极对数不变的情况下,控制器的输出频率和转速成正比。故受器件限制,大功率电机无法做到很高转速。
2)电机转子在高速旋转工况下,转子材料无法承受巨大的离心力,材料应力与转子直径的二次方成正比,导致转子的直径不能设计得足够大。
3)在功率和转矩给定的条件下,当减小转子直径设计尺寸时,由于转子组件的动力学限制,不能把电机转子设计得足够长。
高速电机旋转时,转子表面应力为:

方案参数设计为:ρ为转子材料密度7 800kg/m3,电机转子外直径Dmax为100mm,电机转速n 为24 000r/min。转子表面应力σ,计算得出为123MPa,转子表面应力必须小于其材料屈服强度,并考虑一定安全裕量,即:

其中[σ]为材料的屈服强度,S 为需要靠考虑的安全系数。S可根据情况取1.5~2[3]。
根据公式有转矩

其中,电机转速n 为24 000r/min,电机功率P 为105kW,计算得出电机转矩T为41.7N·m。

又已知电机在一定冷却条件下的工程设计经验公式:其中,电机转子最大外径Dmax为100mm,电机最大转矩T为设计值为41.7N·m。X 的取值通常情况下由电机绕组的电流密度和气隙磁密以及散热能力来共同决定。X 的取值在水冷条件下一般是20 左右,风冷条件下是40左右。设计中X取40。
当流体设计完成时,在已知转速n和转矩T需求的条件下,根据上述公式(6),就可以快速获得电机转子的轴向尺寸Lm为167mm。
电机转子结构尺寸对转子组件的设计和转子动力学的计算具有非常重要的意义。而转子组件的动力学问题又反过来直接影响着电机设计和流体设计的参数框架。电机系统的关键设计参数见表2。
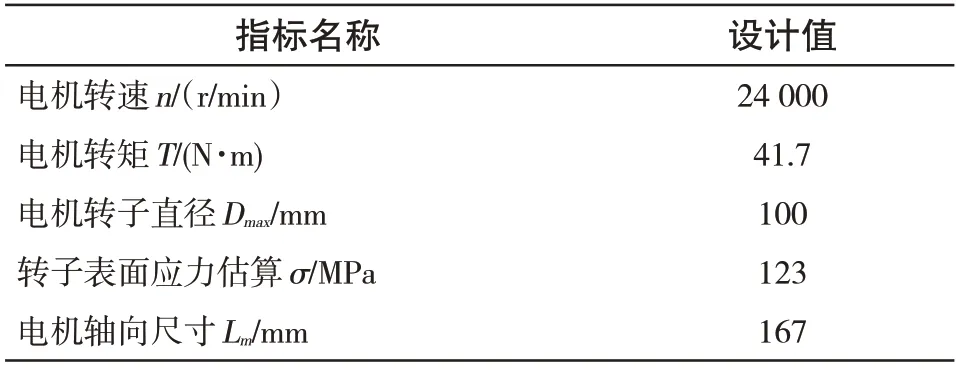
表2 电机设计参数Tab.2 Motor parameters
1.3 磁轴承设计
合理的磁轴承本体设计,是磁悬浮系统能否正常工作的关键。以8极异极型主动式磁轴承为例,进行参数选定,主要考虑如下几个方面:
1.3.1 磁轴承转子外径
考虑到转子组件的可装配性和设计方便,磁轴承的转子外径一般小于或等于电机转子外径。再综合有限元法进行应力分析,载荷设置为系统设计转速,当磁轴承转子内部应力计算结果满足要求的条件下,选取一个合适的外径尺寸DMB=90mm。
1.3.2 磁轴承最大电磁力
根据上文所述方法获得的电机转子和叶轮的结构尺寸,可以预估出一个转子组件的总重力,方案中为100kg。一般卧式磁悬浮高速离心鼓风机系统中,考虑动平衡,电机磁偏拉力等影响,磁轴承径向单向最大电磁力可以预先设计为3~5倍重力,轴向最大电磁力则根据轴向负载的大小,考虑喘振等极端情况,预留一定倍数过载能力。

最大电磁力F为设计为3 000N,最大气隙磁密BMAX为1.5T,μ0为真空磁导率4π×10-7H/m。计算出所需磁轴承磁极面积A为3 351mm2。对于径向磁轴承而言,通常A为1/4磁轴承转子圆柱体外侧表面积[4]。
1.3.3 磁轴承轴向尺寸
根据上面所求取的磁极面积A 为3 351mm2和磁轴承转子外径DMB为90mm,依据公式:

计算出磁轴承转子的长度LMB为52.6mm。由于磁轴承定子齿极无法覆盖整个圆环,转子外圆面无法全部成为可利用的磁极面积,故此处计算得出的LMB比实际值略小,实际设计取LMB/0.8 为设计值,实际设计值65mm。
1.3.4 气隙选择
通常气隙值依据磁轴承转子直径DMB决定,一般取气隙s:
DMB<100mm时,s=0.3~0.6mm
DMB=100~1 000mm时,s=0.6~1.0mm
根据磁力轴承的使用情况,在结构设计前,以上参数就能够确定下来[5]。
进一步也可以参考磁轴承国际标准ISO14839-4进行选取。
此方案磁轴承转子外径DMB为90mm,故选择0.5mm作为磁轴承定转子之间的气隙。
1.3.5 匝数和电感
以常规的8极异极型主动式磁轴承为例,根据磁路计算公式,单极线圈匝数为:

磁轴承定子和转子之间的气隙s为0.5mm[6]。IMAX受限于电力电子器件的选型,以及功放的损耗考量,不能取得太大,设计中取值为10A。计算得出单极匝数N为60,每一路的电感为30.3mH。IMAX越大系统损耗越大,匝数就需求越低,电感L 越小,电流变化越快。在磁轴承功率放大器母线电压不变的条件下,最大电流IMAX和匝数N 分别影响系统的损耗和系统的响应速率。经过权衡,选定好匝数和电流后,此时的电感L 和最大电流IMAX作为磁轴承控制器功率放大器设计的依据。
1.3.6 偏置电流
偏置电流I0直接决定磁轴承工作点的气隙磁密大小,是决定磁轴承能否在BH 曲线线性段工作的关键,根据公式:

将α=22.5°带入式(15),计算得出位移刚度ks为5 602N/mm,电流刚度Ki为560N/A。
在PD控制器的作用下控制电流可以表示为

磁轴承电磁力可表示为:

刚度可表示为

阻尼可表示为

此刚度K,阻尼C可大致作为转子动力学临界转速计算所需设置的支撑刚度和阻尼[7]。磁悬浮轴承设计的关键参数见表3。
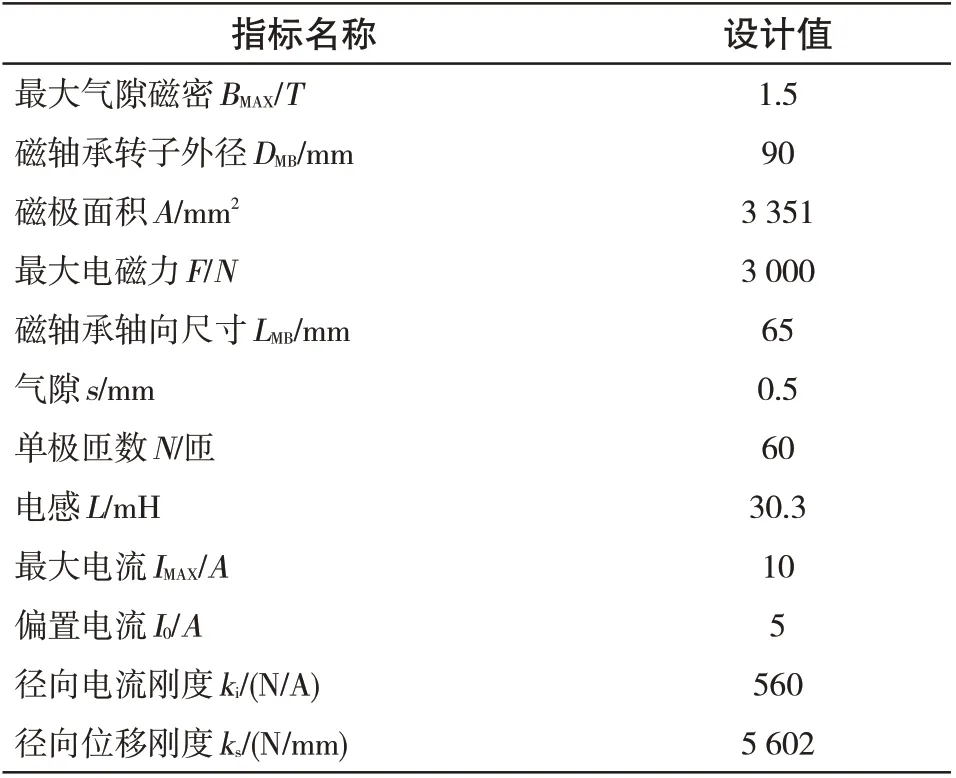
表3 磁轴承设计参数Tab.3 Magnetic bearing design parameters
1.4 转子组件设计及轴承安装位置选取
磁悬浮控制系统要求传感器能够时时检测当前转子的位移变化。传感器应该避免设置在本征振型节点上。而且传感器的检测位置和磁轴承的安装位置也需要尽量安装在本征振型节点的同一侧,避免出现正向的反馈作用,引起系统失稳。由此可见,根据振型合理布置传感器是必须的,同时准确计算磁悬浮鼓风机转子临界转速和振型尤为重要[8]。
在工程上转子的模态分析大多使用有限元法。使用ANSYS 计算较为方便和快速。根据已知的参数,如电机转子的外径和长度,叶轮的大致模型,事先估算出的磁轴承轴向长度,建立出转子组件的模型。按照所用材料的相关参数,设置好模型,并设置好各种零部件的配合关系和支撑刚度阻尼,进行进一步的转子动力学仿真校核。通过仿真分析,可以验证磁轴承安装位置的合理性,以及验证系统的临界转速是否满足需求。同时还可以生成坎贝尔图,并观测转子在哪些转速下会发生共振,从设计上避免机组工作在这一转速下。
2 磁悬浮控制系统设计
磁轴承的控制系统与磁轴承本体是否匹配是悬浮稳定的关键。本文从控制系统各模块的参数框架限定,来讨论控制系统设计。
2.1 功率放大器
磁轴承功率放大器的作用是向磁轴承线圈提供控制电流,以产生所需的电磁力,是系统控制的执行环节。在高速电机系统中,转速经常需要达到几万转,这就对磁轴承功率放大器有了更高的通频带宽和更高效率的要求。对比模拟功放,开关功放由于效率高、动态特性好,在磁轴承中得到了广泛的应用。
磁轴承开关功放主要有如下四种。包括脉宽调制型、采样保持型、滞环比较型和最小脉宽型等。其中,脉宽调制型开关功放的优点是开关频率固定,能限制最小导通和关断脉冲的宽度,输出波形质量好、稳态精度高、可靠性高,在高速磁悬浮轴承控制系统中得到了广泛应用[9]。
针对特定的磁悬浮系统,功率放大器在设计之初,需要至少明确两个参数,一个是允许的最大电流IMAX,一个是母线电压U。这两个参数直接影响着功率放大器的负载能力、响应速率以及功耗。
最大电流指标,要根据磁轴承的功率器件选型,结合磁轴承电磁设计来决定。电流过大会增加设计难度和成本,影响电路板的排布、体积和功率放大器的损耗。过小又会增大磁轴承的设计匝数,加大电感,进而降低系统响应速率。
母线电压的选取要根据所需的电流响应速率计算得出。转子在旋转过程中主要的振动频率始终是与转子转频同频,需要有功率放大器母线电压U:

此系统设计中磁轴承转子的振幅为xm是保护轴承间隙,一般设计成最大气隙的0.2~0.4 倍,此处取0.2mm,振动角频率ω=2πn/60计算得出为ω=2 513rad/s,电感为L为30mH,电流刚度为ki为560N/A,位移刚度ks为5 602N/mm,计算得出母线电压应不低于150V。
只有在U满足上述条件时,功率放大器才能不失真地给出相应的控制电流,进而产生控制力使转子系统稳定悬浮[10]。
至此功率放大器的两个关键参数母线电压U和最大电流IMAX得以确定。磁悬浮控制器关键设计参数见表4。

表4 磁轴承控制器参数Tab.4 Magnetic bearing controller parameters
2.2 位移传感器
准确测量磁轴承转子位置是磁悬浮控制系统稳定运行的前提。实际工作中,磁悬浮电机高速旋转,只能使用非接触式传感器,并且要求其分辨率高、灵敏度高、稳定性好及动态响应快[11]。
磁悬浮系统中常用的传感器包括电容式,光纤式和电感式位移传感器。电感式包括变磁阻式、差动变压器式和电涡流式。本文主要讨论电涡流传感器的布置方法和使用注意事项。
径向传感器一般四个传感器探头均匀环绕布置在转轴上,与径向磁轴承电磁力的坐标系对应,两两成对,输出差动后的位移信号。轴向传感器可以布置在轴端,也可以布置在轴肩[12]。
选择合适的传感器量程。量程应稍大于两倍气隙距离,让转子悬浮时传感器工作在线性段。
由于探头线圈产生的磁场范围是一定的,而被测体表面形成的涡流场也是一定的。通常要求当被测体表面为平面时,被测面直径应大于探头头部直径的1.5倍以上;当被测体为圆轴且探头中心线与轴心线正交时,一般要求被测轴直径为探头头部直径的3倍以上。
被测体表面粗糙,会给实际测量带来误差,因此被测体表面要求平整光滑。通常对于振动测量的被测表面粗糙度要求在0.4um~0.8um之间。制造工艺上建议对转子进行外圆磨加工。
综上应选择合适的电涡流量程、探头大小、带宽、安装布置位置和检测面的粗糙度,以保证系统的稳定悬浮。
2.3 控制算法
控制算法主要分为三个模块:
1)PID 控制:由于磁轴承的位移负刚度,在频域上被控对象在全频段,相位滞后180°。需要施加额外的PID控制,提供一定的相位超前,才能让系统稳定[13]。
2)交叉反馈控制:转子具有陀螺效应,一般在陀螺转子上需要考虑这个问题。但在细长型转子上也有一定的影响。随着转速升高,章动模态的能量会不断积累导致系统失稳。与此同时,进动模态的频率随转速升高而降低,控制力对它的阻尼作用也会不断下降,当进动频率进入积分参数作用范围内时,进动模态会造成系统失稳。转子的陀螺效应会让系统变得不稳定,这个时候需要额外的交叉反馈控制。抑制其陀螺效应对系统的影响[14]。
3)振动抑制控制:转子的不平衡力和电机的磁偏拉力等干扰,会让转子转动时振动加剧,此时需要我们添加额外的振动抑制算法。通过使用特定频率的带阻滤波器或自适应带阻滤波器来抑制和补偿特定频率的干扰的影响。在转子动平衡较好,几何中心和质心距离相差不大的情况下,力自由振动抑制算法可基本消除控制电流中的同频成分,使转子绕质量中心旋转。它适用于要求转子系统对外部结构振动干扰小、对转子轴心轨迹偏移较低的场合,包括各种压缩机和鼓风机中的应用[15-17]。
磁悬浮控制算法的选取和相位补偿器的运用可以有很多形式,其控制算法也是有很多种类可选择,但是在工程上最常用最直接有效的算法一般是分散PID、交叉反馈、力自由振动抑制。这些算法由于调试简单,使用方便,理解直观,容易掌握,广泛应用在各大公司的磁悬浮产品中。
2.4 上位机
磁悬浮系统上位机的主要功能是时时监控转子的悬浮状态,包括转子的位移、控制电流、转速、振动频谱和轴心轨迹等[18]。
控制系统中的上位机一般使用NI的LabVIEW平台进行设计开发,其内部包含了完整的控制插件可供选择,使用LabVIEW设计的上位机,在数据采集和数据图像化处理、仪器控制等方面均可以轻松实现,并能够稳定运行。
根据观测得到的数据进行磁悬浮控制参数的进一步优化。有些时候上位机也可以设计成在线修改PID等控制参数,是考虑到高速转子失稳后的危险性,升速过程中不建议这样做。
3 结论
本文首先以高速磁悬浮离心式鼓风机的系统设计为例,梳理了叶轮、电机、磁悬浮轴承、转子组件设计几方面的关联和互相限制因素。而后总结了磁悬浮轴承设计方法,及与其匹配的磁悬浮控制系统参数要求。最后对于磁悬浮控制系统的各个模块的分类选取、使用方法、安装条件、设计思路和参数限定做一个简单的总结。对于快速设计磁悬浮系统而言,具有参考和借鉴意义。