基于PRNU 估计的图像篡改检测研究
——刑事案件中使用数字图像作为证据的算法实探
2021-03-24王新月
王新月,刘 丹
一、本研究的背景及意义
图像可以直观、客观地反映现实场景,因此,被视为有说服力的法庭物证,被广泛应用于刑事案件侦查与法庭取证过程中,同时,图像也越来越多地用于支持重要决策。但是,随着科技的不断发展、进步,数码相机、手机等拍照设备越来越普及,人们可以随时随地拍摄各种数字图像,随着计算机和互联网的飞速发展,专业人士甚至可以通过AI 技术直接生成各种各样的图像,同时,数字图像的存储与传递变得十分简单。随着网络的迅速发展,数字图像几乎遍布了互联网和现实生活中的每个角落。
在公安以及司法实践中,越来越多的案件涉及图像真实性检验鉴定的问题。在司法审判中,越来越多的图像的真实性受到涉案犯罪嫌疑人或当事人的质疑,大多数案件需要对图像的真实性进行检验鉴定以后才能够成为有效的法庭证据。为鉴别数字图像与司法证据的可信性与真实性,以及数字图像情报的可靠性。科学、量化地证实数字图像的真实性早已成为证据科学领域的一个非常重要的研究方向。
二、相关研究工作综述
为了精确地鉴别数字图像的真伪,科研工作者们已经提出了很多数字图像取证的方法。图像取证技术一般分为主动取证技术和被动取证技术两大类。图像主动取证的主要特点是必须事先将数字水印或签名等信息嵌入到待传输图像中,接收者在收到该图像后通过特定密钥提取该信息,根据提取出来的水印或签名是否完整,判断出该图像是否经过篡改[1-2]。在实际应用的过程中,由于种种原因不能及时地将水印嵌入图像,从而限制了该方法的应用领域。另外,具备自动添加水印功能的成像设备,其价格较为昂贵,生活中所使用的绝大多数的成像设备都不具备这一功能,因此,数字图像主动取证技术的应用范围很小。与主动取证技术不同,数字图像被动取证技术仅仅依赖于图像特征,不需要提前嵌入其他信息,因此,被动取证技术的应用范围更广,有较强的实用性,从而成为目前国内外极具研究价值的一个研究方向。
PRNU 噪声是由于在传感器制造过程中,感光器件上硅片薄厚程度的不同造成的。入射光条件相同的情况下,感光元件的每个像素块的表现并非完全相同。通常不同相机的PRNU 噪声都不是相同的,就像人类的指纹一样[3],PRNU 噪声是传感器模式噪声中的一种。因此,Jan Lukás 等人提出将传感器模式噪声用于源相机检测[4]。
PRNU 噪声在经过相机的一些后处理以及其他噪声的添加之后,PRNU 噪声依旧存在,并且被消除的难度很大。正是由于该特性的存在,PRNU 可以应用到很多方向,主要有以下两种[5]:第一种应用方向是图像来源检测和对源相机的验证,在公安实践和司法审判领域上发挥着越来越重要的作用;第二种应用方向是图像伪造检测,在此过程中PRNU 噪声相当于是一种用来检测图像篡改的水印。因为一些较为常见的伪造图像手段,例如,复制—粘贴篡改或者拼接篡改等方法会改变原始图像的PRNU特征,当一张照片上检测出两种或两种以上不同的PRNU 特征时,则可以判定该图像为伪造图像。
与数码相机相比,智能手机的图像传感器要小几十倍,像素的不均匀性更为明显,而且智能手机的普及率和便携性比数码相机要高得多,因此本论文通过对手机拍摄的图像进行研究,分析市面上较为流行的华为手机PRNU,并利用光响应非均匀性(PRNU)噪声对篡改图像进行检测。
三、原理剖析:图像篡改检测的基本过程
本文的算法实现分为训练阶段和测试阶段。在训练阶段中,首先通过Xiangui Kang 等人提出的基于八邻域上下文自适应插值(PCAI8)的边缘自适应传感器模式噪声预测器预测并提取PRNU 噪声,对提取出的PRNU 噪声进行分块处理,然后整合所有训练噪声块采用PCA 对其进行降维处理、提取特征。在测试阶段中,提取测试图像的PRNU 噪声,并进行分块处理,将每个噪声块与训练噪声块相比较,采用三阶近邻法对测试噪声块的所属类别进行判定,被篡改区域与原图像所属类别不一致,从而检测出被篡改区域。
(一)基于PCAI8 的PRNU 噪声的提取
首先,本文采用Xiangui Kang 等人提出的基于八邻域上下文自适应插值(PCAI8)的边缘自适应传感器模式噪声预测器[6]对中心像素进行预测,抑制图像边缘信息对PRNU 噪声的干扰,以此更好地提取PRNU 噪声。
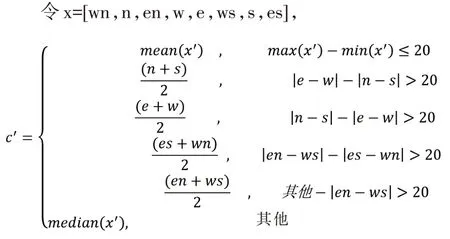
在PCAI8 方法中,将中心像素标记为c,其八邻域分别记为(图1):wn,n,en,w,e,ws,s,es,将局部区域分为:光滑区域、水平和垂直边缘、左右对角线边缘等类型,分别使用均值滤波器估计光滑区域的中心像素,沿对应边缘估计水平、垂直、对角线边缘的中心像素值,其他区域则使用中值滤波器进行估计。
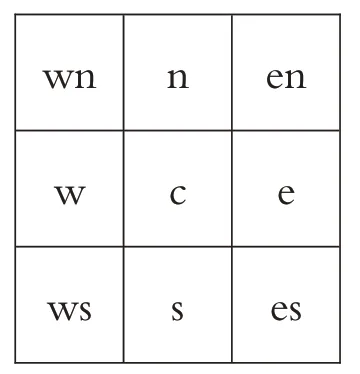
图1 中心像素及其八邻域像素标记
中心像素c 的预测方法表示为:
其次,将原图像与预测数据相减,其差值即为提取的PRNU 噪声。
最后,采用维纳滤波的方法对结果进行优化,得到最终的PRNU 噪声。
(二)PCA 降维提取特征值
主成分分析(PCA)算法是最为常见的一种数据分析的方法,通常用于对高维数据进行降维处理,经过降维去除噪声,发现数据中的模式,可用于提取数据中的主要特征分量[7]。PCA 的目标是压缩原数据量,用最少的维数来描述最重要的数据特征,通过线性变换将数据投影到一个新的坐标系统中,以增大类间距离,减小类内距离,便于后续的分类处理。
PCA 算法在本实验中的具体实现步骤:
A.将训练集中提取的所有PRNU 噪声块组成一个样本矩阵A,矩阵A 的每一行为一个PRNU 噪声块的行向量;
B.计算矩阵A 中所有行向量的平均向量,记为向量B,将矩阵A 中每一维的数据分别减去向量B得到一个新矩阵,记为矩阵C;
C.计算矩阵C 的协方差矩阵D;
D.计算出协方差矩阵D 的特征向量及其特征值;
E.根据特征值的大小进行降序排列,取所有特征值之和的百分之九十,及这些特征值对应的特征向量,将这些特征向量组成投影矩阵P;
F. 矩阵A 与投影矩阵P 的乘积即为降维后数据。
本文中用PCA 算法将4800×90000 矩阵映射成4800×294 的矩阵。
(三)三阶近邻分类
在测试阶段,首先提取测试图像的PRNU 噪声,滑动分块保存PRNU 噪声,使每个测试PRNU 块与特征向量相乘,将其投影到与训练PRNU 块相同的坐标系统中,再分别计算每个测试PRNU 块与训练PRNU 块的欧式距离,根据欧氏距离的大小来判定测试PRNU 块与训练PRNU 块的相似性,距离越大相似度越低,距离越小相似度越高,一般选用距离训练PRNU 块最近的作为该测试块的所属类别。
选出其中与测试PRNU 块距离最小的三个训练块,计算这三个训练块所属的类分别标记为类别1、类别2 和类别3,如果类别1 和类别2 且类别2 和类别3 不属于同一类别,则该测试PRNU 块属于类别1;如果类别1 和类别2 相同,则该测试PRNU 块属于类别1,而类别2 与该测试PRNU 块也是相似的;若类别2 和类别3 属于同一类别,则该测试PRNU 块属于类别2,而类别3 与该测试PRNU 块也是相似的,类别1 虽然与该测试PRNU 块距离最近却不属于同一类别。
具体算法部分实现框图如下(见图2):
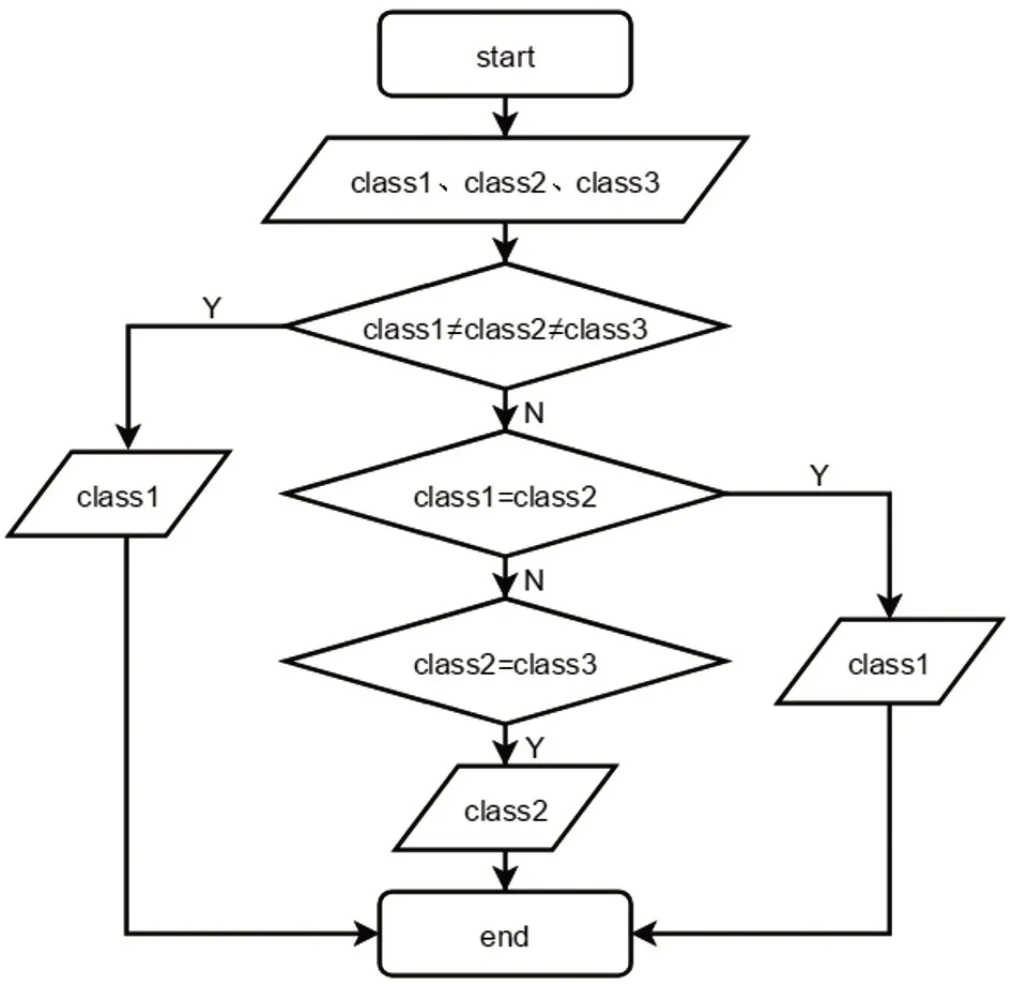
图2 三阶近邻算法实现
四、分析结果
本文选用华为荣耀9 和华为畅享Z 两款相机,分别使用原相机拍摄九张照片,其中五张照片作为训练图像集,另外四张照片作为测试图像集,随机取景,光圈值、曝光时间、ISO 值、焦距等均设置为自动模式。两款手机的相机型号、原相机分辨率和图像格式信息的对照见表1。

表1 相机型号、分辨率、图像格式信息
实验过程中采用滑动窗法对特征图像进行分块处理,滑动框尺寸为300×300,步长为100,本文方法检测准确率为70.15%。
本文是以Xiangui Kang 的论文A context-adap⁃tive SPN predictor for trustworthy source camera identifi⁃cation 中提到的方法PCAI8 来提取图片PRNU 噪声[4],使用PCA 降维法得到噪声的特征值和特征向量,使用三阶近邻法的分类思想来判定测试噪声块所属相机类型,从而检测出图像篡改区域。由于在训练阶段和测试阶段均采用分块处理,因此,无需限定训练图像与测试图像的大小,也无需事先对图像进行裁剪。
五、结论
随着美图秀秀、Photoshop 等图像编辑工具的推出与普及,其一键式操作使得修改图像内容变得越来越容易,篡改图像也越来越不易察觉,甚至可以做到以假乱真的程度,出于娱乐和美观等目的来对图像进行修改, 给人们的生活增添了色彩,但是从商业、司法角度,或者以敲诈勒索为目的对图像进行恶意篡改[8],就会侵犯人们的名誉和财产,严重的甚至会威胁社会的公平正义与社会稳定,同时,导致刑事案件在侦查、审判的过程中作为证据的数字图像可信度越来越低。因此,设计检测工具通过科学、量化的办法来帮助确定一个数字图像的真实性是必要的。本文的方法能够较为准确地检测出图像篡改区域,为证据的真实性提供量化依据。