基于半实物仿真平台的工业机器人实验教学方法
2021-03-22闵飞炎
闵飞炎

摘 要:探讨半实物仿真技术在工业机器人教学实验中的应用方案。基于某型伺服电机和EtherCAT总线技术开发实验平台,并基于matlab/Simulink开发环境搭建实时控制软件,实现了数字机器人、半实物机器人、实物机器人和动画机器人的同步控制和仿真。这种结合在暨南大学信息学院机器人相关专业的研究型实验课程中应用。该方案简化了机器人系统的开发过程,降低了教学实践难度,避免了单纯虚拟化实验而造成的与实际脱节,同时丰富了实验内容,提供了实验效率,创新了实验形式。
关键词:半实物仿真平台; 工业机器人; 实验教学
中图分类号:TP242.2 文献标识码:A 文章编号:1006-3315(2021)3-170-002
1.引言
工业机器人指的是工业领域的多关节机械手或多自由度的机器装置,可依靠自身的动力能源和控制能力实现各种工业加工制造功能,是技术密集度及自动化程度很高的典型机电一体化加工设备。工业机器人是“中国制造2025”的重点发展领域,也是顺应国家建设需求的典型新工科专业。
工业机器人涉及得到机械学、电子工程、自动控制和人工智能等多种先进技术。国内外诸多高校和研究人员都开始了对机器人课程建设的探究。在本科阶段的机器人教学中面临着多方面的挑战和需求,包括:
(1)教学平台的安全性。教学中的机器人将与教师和学生在同一空间工作,执行机械任务。然而实验课程的控制程序不可避免的存在安全隐患,甚至造成伤害事件。
(20教学平台的灵活配置。教学中的工业机器人的构型和功能多样。从构型上看,包括单轴、平面两轴,SCARA,6关节,Delta机器人等多种形式。从控制功能上看,有传统工业机器人和协作机器人等。
(3)教学平台的开放性。除本體外,机器人构件还包括电机、伺服器、减速器、编码器和各种传感器;从软件功能上看,包括实时通信、路径规划和插补、运动学和动力学控制等。教学实验平台应该使得学生学习到软硬件的工作机理和开发方案。
(4)教学平台的生动性。为了激发学生的主观能动性,必须多维度的显现机器人的运动轨迹、参数变化趋势和性能指标。
结合国内外机器人教学平台的需求,本文提出了基于半实物仿真平台的构成和教学方案。
2.实验平台的构成和功能
本研发团队结合上述需求,基于工控机和simulink实时仿真环境开发了工业机器人教学实验平台。
从系统构成来说,该平台包括:(1)工业机器人,实验平台中的机器人包括多种存在形式,包括:运行在计算机上的仿真机器人、由电机和传感器组合成的半实物机器人、实物机器人,以及用于分析和显示的动画机器人;(2)运行在工控机上的机器人控制器,在simulink环境中编写,并运行在simulink-Realtime系统上;(3)示教器,用于教学和实验的示教器,可为实物示教器,也可由计算机代替。
所有设备通过EtherCAT总线连接并同步工作,教学单位根据需求进行设备,四种形式的机器人可根据教学单位的实际需求进行选配。从仿真对象来说,实现可配置的机器人仿真,包括单轴、平面两轴、SCARA、6关节和Delta机器人,在数字机器人中,通过设置DH参数即可实现配置。DH表和其它参数可通过配置软件进行配置。
从教学和实验内容上来说,包括:电机的认识和建模、关节空间运动和规划、直角空间运动和规划、正向运动学和反向运动学、机器人动力学控制等内容。
为了实现上述功能,在matlab平台上开发4方面的功能,包括:(1)用于机器人控制和仿真的simulink程序,在上位机上开发,并被编译成目标文件,下载至目标实时机上运行; 该程序通过EhterCAT总线实现对半实物机器人和实物机器人的同步控制;(2)机器人配置软件,运行在上位机上的matlab GUI程序,可实现对仿真电机参数、机器人参数和动力学参数的设置,实现不同构型机器人的仿真;(3)算法软件,基于matlab开发的控制和数据分析软件。主要用于模型辨识、控制器设计等算法工具,目标是为实时仿真提供模型、控制参数等计算工作;(4)动画机器人,采用多媒体形式显示机器人的运动过程和性能指标;通过EtherCAT从站接收实时运行数据,将结果以动画的形式显示,运行在windows/matlab上。
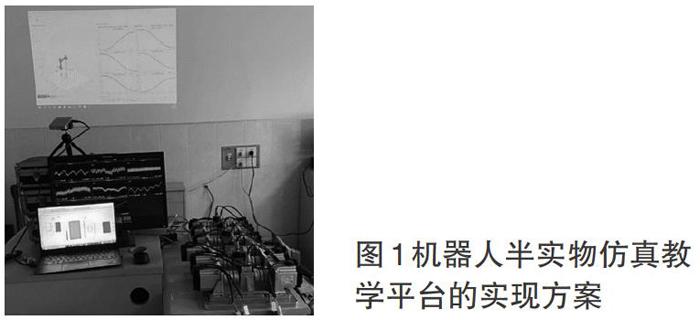
实验平台的实现方案如图1所示。
3.系统软件方案
本科教学中的机器人实验平台将支持机器人实验和开发功能。为了便于教学工作的开展,该平台的控制通信软件基于matlab平台开发。Simulink仿真环境是本平台的核心,其支持实时模式下的控制和仿真,并可基于成熟的机器人工具箱进行二次开发。Simulink软件包括平台界面与配置程序、应用案例库模型库、EatherCAT组件库,数据分析和演示库,如图2所示。
平台界面与配置程序实现对软件组件的组织和协调,实现对工程的管理和关键信息的提取显示,支持工程创建,案例库管理、模型库管理、EatherCAT组件管理、数据分析和演示库管理功能。应用案例库实现电机和各型工业机器人的建模、运动学控制和动力学控制。用户通过设置相关参数,即可实现不同参数的机器人的数字仿真和半实物仿真。模型库用于实现机器人的关键组件和控制技术,包括先进模型辨识算法、先进机器人控制算法等。模型库中的相关模块可用于替换特定案例中的相关组件,从而支持机器人控制技术的探索和研究工作。
EatherCAT组件库用于实现EatherCAT网络的监视与控制,实现对电机拖动平台的直接控制。相关组件被集成到数字仿真案例中,即可实现半实物仿真。
数据分析和演示库实现对仿真数据的动化显示、记录、解析、回放和分析功能。
4.教学方案设计
在实验教学中,教师根据教学计划筛选出合适的仿真应用场景,设计实验大纲。学生从模型库中选择合适的软件组件,搭建仿真系统,实现半实物仿真,从而加深对机器人技术的理解,丰富教学内容。
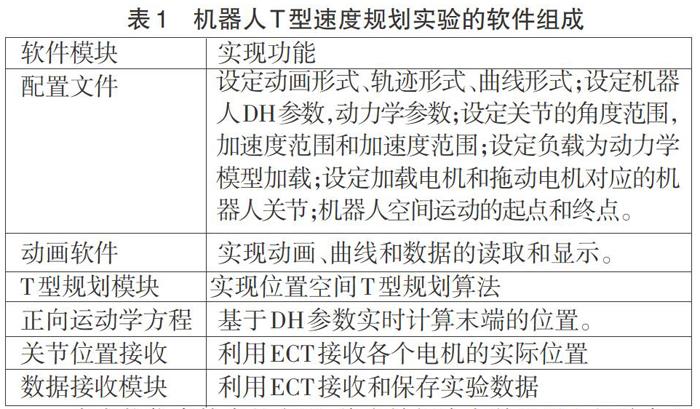
如表1列举了针对机器人运动学课程设计的T型速度规划实验的软件组成,在此基础上可开展实验教学。
半实物仿真技术的应用,将有效解决本科机器人相关专业学生实验教学的部分难题,将理论教学、仿真和实验结合起来,增强学生对机器人、控制理论和电子技术的理解和应用能力。
参考文献:
[1]Peter Corke, Robotics, Vision and Control, Fundamental Algorithms in MATLAB, Springer
[2]刘冬等.基于EtherCAT的机器人控制总线方案研究,计算机工程与设计,2013(4)