中上层浮鱼礁最优单锚系泊方式研究
2021-03-22潘昀,杨凤婷,毕春伟,李磊,周阳*
潘 昀, 杨 凤 婷, 毕 春 伟, 李 磊, 周 阳*
(1.浙江海洋大学 船舶与海运学院,浙江 舟山 316022;2.浙江海洋大学 海洋工程装备学院,浙江 舟山 316022;3.大连理工大学 海岸和近海工程国家重点实验室,辽宁 大连 116024)
0 引 言
我国南方海域的动力环境和生态环境与北方海域差异性较大,主要表现在:(1)南方海域,尤其东海位于大陆架浅海水域,光照充足,受台湾暖流和黄海沿岸流的影响,水体营养盐十分丰富.(2)南方海域岛屿众多,是鱼、虾、蟹、头足类等高级消费者栖息和繁殖的天然场所[1].(3)北方海域生产种类集中在海参、鲍鱼、扇贝等初级消费者,结合人工鱼礁改善上升流,营造生态环境.(4)海区海床地质存在较大差异,北方海域以沙质和基岩海床为主,而南方海域以粉沙质和淤泥质为主,需要考虑人工鱼礁的沉降和淤积.因此,浮式、筏式、网箱等中上层人工生境建设方式应是我国南方海洋牧场建设模式的主要途径[1-2].
D′ltri[3]通过观测海域投放的浮鱼礁发现,锚固的浮体结构物常吸引相对个体较大的鱼群,拖动的浮体结构常吸引个体较小的鱼群聚集,越小的鱼越贴近结构物,并且鱼群在黑夜中也会靠近结构物.然而如果结构物长时间伴随波浪摆动,鱼群就会分散开.因此,锚固的中上层浮鱼礁在波浪作用下应具备较好的稳定性才能保证聚鱼和庇鱼效果.浮鱼礁锚泊方式在保证浮鱼礁安全性和作业性前提下,应优先考虑系缚简便、易投放,适合群化、规模化建设鱼礁群,可选择单锚系泊.中上层浮鱼礁早期在日本、美国、英国等国家[2-3]搭载气象监测系统和鱼类监测系统在大于100 m水深海区使用,应用于浅海还需要进一步的研究.常用的浮鱼礁由浮力系统、礁体系统、锚泊系统3部分组成,而不同的锚泊方式对浮鱼礁的运动特性影响较大,需要选择合适的锚系点和锚绳拓扑方式才能更好地发挥对浮体的系留作用,提升聚鱼效果.锚绳系缚的浮体结构已经广泛应用于海洋气象、水质和生态监测、导航系统、油气开采和海洋设施养殖等重要海洋资源开发及海洋工程设计中.为提高上述浮体结构的安全和作业性能,须对锚泊系统的水动力特性进行分析,主要方法有静力学分析和动力学分析.Agarwal等[4]、Gobat等[5]、Umar等[6]研究了铁链系缚的浮动浮体平台的动力安全性能.Kim等[7]、Zhu等[8]对波浪作用下单锚绳和多锚绳系缚的Spar平台和球形浮标的动力响应进行了研究,得出锚绳的系缚方式对浮体结构的运动和受力有较大影响的结论,仅使用拉紧的锚绳很大程度上降低了上部浮体的稳定和作业性能.张健等[9]建立了不出水条件下框架浮鱼礁的波浪水动力数值模型,对比分析了四锚系泊和单锚系泊方式下浮鱼礁的稳定性和受力特性,结果表明四锚系泊方式稳定性较好,网衣受波浪力更大.该研究存在两点考虑不周的地方:一是由于潮汐和波浪对水深的影响,中上层浮鱼礁难免出水;二是单锚直接系缚在浮架上,与搭配辅助锚稳定性差异较大.因此,针对浮鱼礁锚泊方式的水动力特性研究处在起步阶段,需要在借鉴海洋平台、养殖装备和浮标等锚泊方式的基础上深入研究.
早期中上层浮鱼礁主要适用于深海,进一步开展浅海区域波浪作用下中上层浮鱼礁单锚系泊方式的研究是现阶段浮鱼礁研究的重点部分.现有浮鱼礁水动力数值模型中浮鱼礁各组成结构的水动力系数均取自于各结构单独波浪水槽的试验结果,仍需要对浮鱼礁整体运动和受力进行物理试验验证.浮鱼礁的稳定性和安全性同样重要,需要探寻能够定量描述浮鱼礁运动过程的参数作为设计浮鱼礁的参考标准.这些即是本文将开展的主要研究内容.
1 数值模型验证
张健等[9]、潘昀等[10]基于有限单元划分(浮架)和集中质量点(网衣和锚绳)方法建立了浮鱼礁波浪水动力数值模型,模型中浮鱼礁各组成结构的水动力系数均取自于各结构单独波浪水槽的试验结果.其中,潘昀等[10]在数值模型中添加了出水条件的判别,并且根据出水条件下的波浪理论[11],考虑了波浪水面变化的相对水深修正,拓宽了数值模型使用范围的同时提高了计算精度.该浮鱼礁数值模型仅验证了波浪水槽中浮鱼礁物理模型运动试验结果,但缺乏锚绳拉力的验证.
1.1 物理模型制作
浮鱼礁物理模型的制作除了满足几何相似、动力相似、运动相似以外,最困难的是满足网衣和锚绳的弹性相似以及网衣附近的流场相似.由于实验室水槽尺寸有限(长32 m、宽0.8 m、高1 m),模型制作和试验尽可能与实际相近,选择网目较大的网衣,人工添加橡皮筋增加锚绳模型的弹性.综合考虑波浪水槽尺寸和实际海洋牧场海区面积,选取几何尺度λ=20,仅针对浮鱼礁锚绳拉力进行测量分析,用于验证数值模型的准确性.具体浮鱼礁模型的制作材料、参数和方法参见文献[10,12],该文献同时包括了波浪作用下浮鱼礁示踪点运动轨迹的验证结果.本次试验主要测量了浮鱼礁锚绳的拉力数据,模型布置如图1所示.

图1 试验仪器布置和浮鱼礁物理模型
1.2 试验方法
物理模型试验在浙江海洋大学海洋工程装备学院的波浪水槽中进行,试验使用的仪器有浪高仪和拉力传感器,两者集于同一采集系统,可同步、同频率采集波浪高度和锚绳拉力.其中,浪高仪精度为±1 mm,拉力传感器精度为0.1%.浪高仪布置在浮鱼礁模型正上方(见图1),拉力传感器系缚在一根锚绳底部,波浪高度和锚绳拉力使用同一台电脑同步采集.试验采集时间为120 s,波浪高度和锚绳拉力的采集频率为10 s-1,每种波况平行重复做3次.基于文献[9]中模拟的最大波浪高度(4 m)和最大波浪周期(5.3 s),按比尺换算试验设计了4组波浪条件,波浪要素由浪高仪实测数据统计得出,波浪高度和波浪周期组合关系依次为4.58 cm、1.1 s(波况1);16.63 cm、1.4 s(波况2);11.23 cm、2.1 s(波况3);18.36 cm、4.0 s(波况4),水深0.75 m.拉力传感器采集的数据受周围环境的影响,有些组次出现规律性毛刺,采用快速傅里叶变换算法(FFT)[13]对拉力数据进行光滑.
1.3 结果验证
以λ=20,建立浮鱼礁实际尺寸的数值模型,计算出相应锚绳拉力时历值,再以λ=20缩小至物理模型尺度.考虑浮鱼礁在波浪作用下从初始状态达到运动稳定状态,物理试验和数值模拟的锚绳拉力选择的对比时间段为60~80 s,对比结果见图2.锚绳拉力对比表明,图2中的波况2和3条件下锚绳拉力结果的大小和周期验证较好,而波况1物理试验与数值模拟结果有周期差异,波况4物理试验锚绳极小值比数值模拟小.造成误差的主要原因与水槽的造波质量有关,长时间造波存在反射现象导致波况1短周期波发生变形,而大波浪高度受水深影响使波谷坦化(波况4).
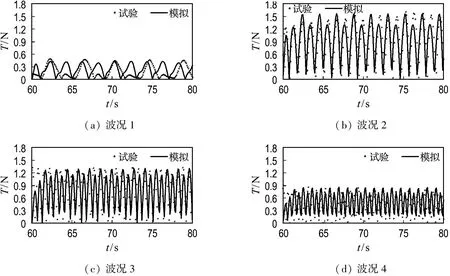
图2 不同波况下物理试验与数值模拟锚绳拉力对比
2 单锚系泊方式对浮鱼礁水动力特性的影响
上述浮鱼礁采用四锚的锚泊方式,浮鱼礁的稳定性好,锚绳拉力均匀,但实际海区投放不仅经济成本高,而且锚碇位置、锚绳长度满足设计要求非常困难.如果有一锚碇位置和锚绳长度错误,浮鱼礁的结构安全和稳定性均会产生显著的差异.因此,在原有的浮鱼礁数值模型中优化设计了单锚系泊方式.单锚系泊方式分为上、下两段,如图3所示,上段4根锚绳称为辅助锚,下段1根锚绳称为主锚,辅助锚和主锚的直径在数值模型中依次选为0.02 m和0.04 m.辅助锚的首点系缚在浮鱼礁的4个底端,而尾点集于同一点,也是主锚的首点.浮鱼礁的运动状态和锚绳受力与图3中L1和L2直接相关,这正是接下来将要研究的内容.详细的此单锚系泊波浪水动力数值模型建立方法可参见文献[10].
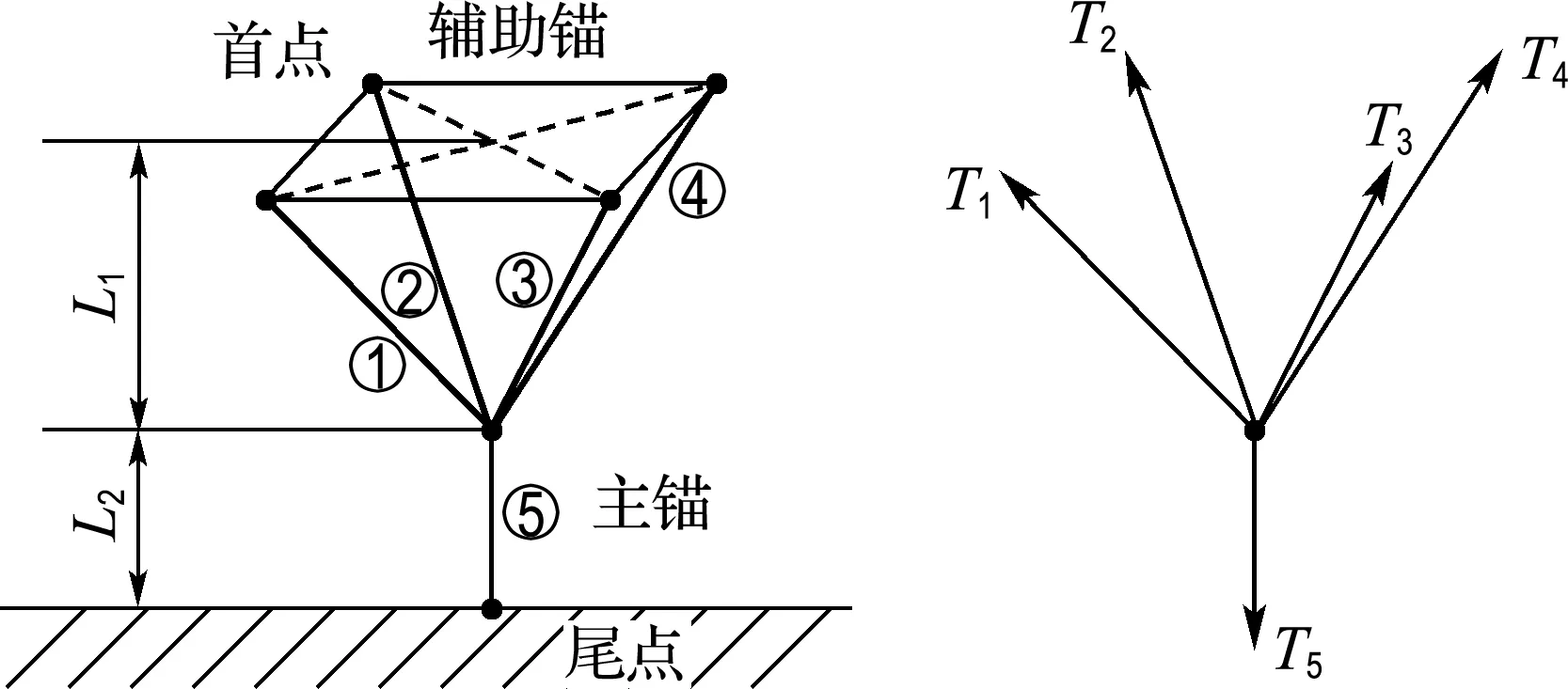
图3 单锚系泊方式及受力
2.1 锚泊方式和模拟条件
浮鱼礁浮架和网衣的结构参数与文献[9]及物理试验的原型一致,主要研究单锚系泊方式对浮鱼礁水动力特性的影响,进而获得最优的锚泊系统参数.具体数值模型的锚泊系统参数如表1所示.模拟工况L1/L2为0/7.2、1/6.2、2/5.2、3/4.2、4/3.2、5/2.2、6/1.2、7/0.2.其中L1为浮架底部中心至⑤号锚绳结点的距离,L2为锚绳结点至海底的距离.因为初始浮架顶部中心在静水面处,浮架是固定尺寸(1.69 m×1.69 m×4.8 m),水深为12 m,所以L1+L2恒为7.2 m.图4给出了两种极限条件下的锚泊方式,以不同的L1距离分多种工况探讨此种单锚系泊方式对浮鱼礁水动力特性的影响.根据实际海洋牧场规划区域地形条件,确定水深为12 m,以及根据线性波理论的适用条件,选取波陡为1/20.文献[14]统计的舟山海域5%累积频率的波浪高度为3 m,5%累积频率的波浪周期为6 s,使用线性波弥散方程计算的波浪周期为6.7 s,两者比较接近,进一步证明了波浪要素选取的可行性.

表1 数值模型参数
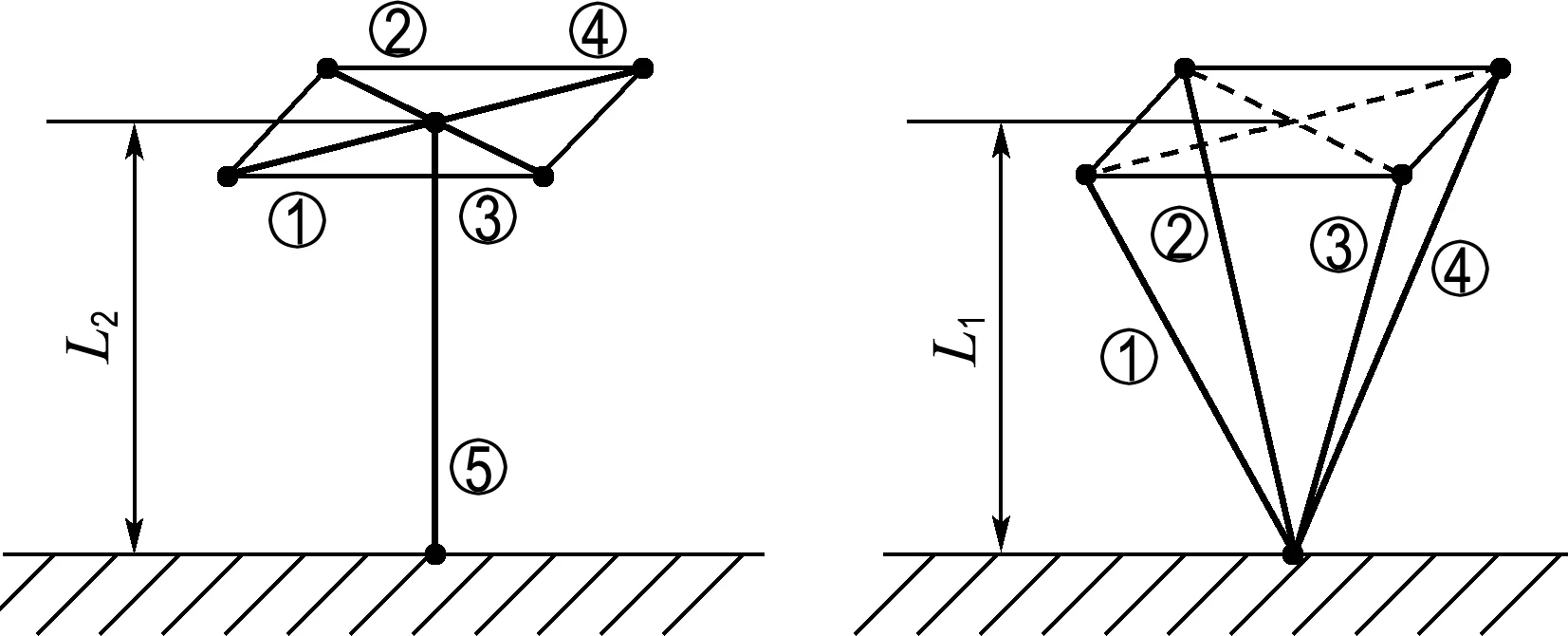
图4 两种极限的锚泊方式
2.2 浮鱼礁运动响应规律
波浪作用下单锚系泊对浮鱼礁运动的影响主要体现在礁体摆动和中心移动.如图5所示,分别给出了不同浮架底部中心至⑤号锚绳结点的距离(L1)对浮鱼礁运动影响.其中,图5(a)为浮鱼礁上下顶中心点连线20 s内(数值模型共计算70 s,浮鱼礁运动已经稳定)的运动轨迹,可以看出:L1为0 m和1 m时,运动轨迹不对称,Y轴负方向存在大角度的摆动,中心位置存在上下移动;L1大于1 m后,运动轨迹左右对称,中心位置移动为自然过渡的曲线,运动轨迹的图形差异性非常小.图5(b)为图5(a)中多周期运动轨迹扫掠的图形面积,可以看出L1为3 m时出现拐点,此时图形面积最小.定义向Y轴正方向摆动为正角,图5(c)为礁体中心线左右摆动角度的时历变化,可以看出,L1为0、1和2 m时,摆动的负角度较大,正角度也出现多个拐点.
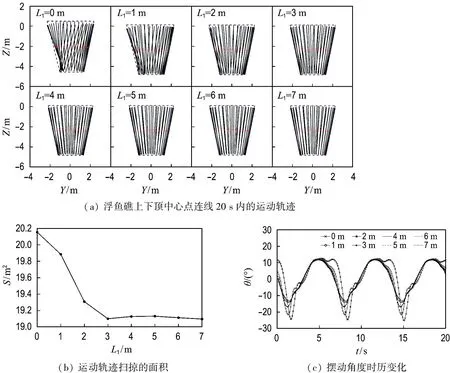
图5 L1对浮鱼礁运动的影响
尽管浮鱼礁特征位置的运动轨迹、轨迹图形面积和摆动角度能够反映出锚绳参数L1对浮鱼礁运动规律的影响,大致可以判断L1为3 m时,波浪作用下浮鱼礁的运动响应最稳定,但难以定量得出准确的最优L1.
2.3 浮鱼礁受力响应规律
浮鱼礁辅助锚、主锚和网衣的拉力分析是判断锚泊方式优劣的重要标准,图6分别给出了L1对浮鱼礁受力的影响.图6(a)为不同L1条件下①号辅助锚20 s内的拉力变化,可以看出L1=0 m 和L1=1 m工况的辅助锚拉力显著大于其他工况.图6(b)中辅助锚20 s内的平均拉力更好地体现出L1对辅助锚受力的影响,L1大于3 m后拉力基本趋于稳定.图6(c)给出了主锚在不同L1条件下的拉力时历曲线,从极值和拐点角度分析,L1对主锚拉力的影响均不大.图6(d)为浮鱼礁网衣网线最大拉力时刻的分布情况,从右侧图例可以看出,网衣最大拉力不大于21 N,比锚绳少两个数量级,所以网衣在波浪作用下所受的阻力最终还是传递给辅助锚和主锚.

图6 L1对浮鱼礁受力的影响
可见,波浪作用下单锚系泊浮鱼礁辅助锚的拉力受L1的影响较大,当L1大于3 m后,辅助锚的拉力逐渐趋于最小值,而主锚和网衣的拉力受L1的影响不明显.
3 最优单锚系泊方式
以上探讨了波浪作用下L1对浮鱼礁的运动响应规律和受力响应规律,通过统计浮鱼礁的运动轨迹、摆动角度、辅助锚拉力等结果,大致可以判断L1=3 m为最佳的单锚系泊参数.但是,尚未能够通过分析一种更具体的物理量得出更精确的L1锚泊参数.
3.1 最优的标准
对比分析浮架礁体左右摆动角度与锚绳拉力的变化关系,图7给出了波浪作用下浮鱼礁运动稳定后200 s内浮架礁体摆动角度(波浪方向为正轴,波浪反方向为负轴)和锚绳拉力相同时刻时历曲线,并且图中使用矩形标识出了锚绳拉力变化剧烈的时刻.从图中可以得出,摆动角度时历曲线发生转折的时刻,锚绳拉力最大,两者有较好的对应关系和周期性变化.摆动角度负角度增大后骤然停止,致使辅助锚拉力和主锚拉力达到最大且变化紊乱;当浮鱼礁达到最大摆动角度,锚绳拉力最小.也就是说,浮鱼礁摆动角度时历曲线出现拐点的次数和拐点位置的历时决定着浮鱼礁的运动和受力响应规律,而这些正是曲线复杂程度的概念.一维曲线复杂程度概念来自于分形理论中的分形维数[15-16],分形维数就是在不同尺度下表征分形集的不规则程度和复杂程度,分形维数可以刻画信号(曲线)的结构特征.
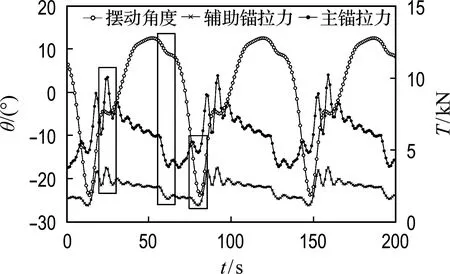
图7 摆动角度与辅助绳受力的关系
因此,波浪作用下浮鱼礁的动力响应规律可以使用浮鱼礁摆动角度时历曲线的分形维数来定量描述.
3.2 浮鱼礁运动曲线分形维数变化
本文使用正方形或正方体具有特征长度的基本图形去近似分形图形,如果某曲线具有N(r)∝r-D关系,即可称D为这一曲线的维数,其中把边长为r的正方形或正方体称为盒,然后来数所要考虑的形状(或构造)中所含的盒数N(r),因此称其为计盒维数.图8为使用计盒维数方法计算的浮鱼礁摆动角度时历曲线分形维数,其中图8(a)也显示L1=3 m时分形维数最小,侧面证明了使用分形维数作为判断标准的合理性.为了进一步得到更为精确的锚泊参数,加密了表1中的计算工况,L1小于2 m和大于4 m每间隔0.5 m增加一组计算工况,L1=3 m左右每间隔0.25 m增加一组计算工况,图8(b)为工况加密后摆动角度时历曲线的分形维数及回归的三次多项式.通过取三次曲线的极值得到L1=2.812 m时,浮鱼礁摆动角度时历曲线的分形维数最小.由于锚绳长度与浮鱼礁设计水深有关,取浮鱼礁浮架底部中心至锚绳结点的距离与浮架高度的比值作为量纲一参数,即L1/4.8 m=0.59.
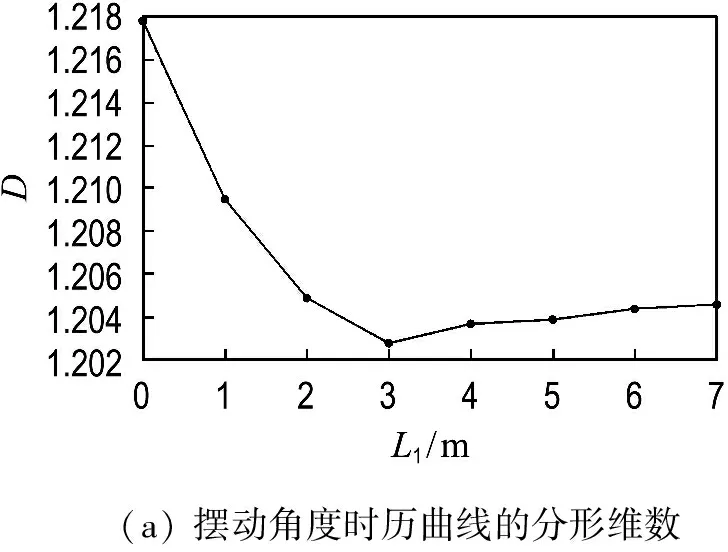
(b)工况加密后摆动角度时历曲线的分形维数及回归分析
所以,通过回归分析工况加密后摆动角度时历曲线的分形维数,得到最优的单锚系泊条件是浮鱼礁浮架底部中心至锚绳结点的距离与浮架高度的比值为0.59.
4 结 论
(1)浮鱼礁浮架底部中心至锚绳结点的距离较小时,浮鱼礁运动轨迹不对称,Y轴负方向存在大角度的摆动,中心位置存在上下移动.根据浮鱼礁特征位置的运动轨迹、轨迹图形面积和摆动角度的变化,大致可以判断浮鱼礁浮架底部中心至锚绳结点的距离等于3 m时,波浪作用下浮鱼礁的运动响应最稳定.
(2)波浪作用下浮鱼礁的动力响应规律可以使用浮鱼礁摆动角度时历曲线的分形维数来定量描述,通过回归分析工况加密后摆动角度时历曲线的分形维数,得到最优的单锚系泊条件是浮鱼礁浮架底部中心至锚绳结点的距离与浮架高度的比值为0.59.