多功能农用机器人底盘结构设计*
2021-03-22陈嘉辉单超杰陈鋆辉
陈嘉辉,单超杰,陈鋆辉,蒋 帆
(浙江同济科技职业学院,浙江 杭州 311231)
1 系统设计
1.1 整体设计
多功能农用机器人(以下简称机器人)可用于小型果实采摘、自动播种等工作。结构主要由执行系统、驱动系统、控制系统及检测系统组成。执行系统是机器人完成抓取、行走等各种运动所必需的机械部件,它包括机械手末端、机械臂、机身底座和行走轮系机构等。驱动系统为执行系统的各个部件提供必要的动力,用以驱动其动力的装置,它包括电机及机械传动部分。控制系统能对驱动系统进行控制,使执行系统按照规定的要求完成动作,同时提供预警系统,对故障和错误进行提示提醒。检测系统是通过各种传感器对执行机构的运动情况进行检测,并将结果反馈给控制系统,结果数据与设定值进行比较,以保证机器人的运动符合设定要求。另外,机器人还设有配重系统,由于其本体的自重和载重较大,使得机体运动惯性较大,为使小臂接近静平衡,将伺服电机及组件、机械轮组等大质量零部件布置在机械臂的另一端。
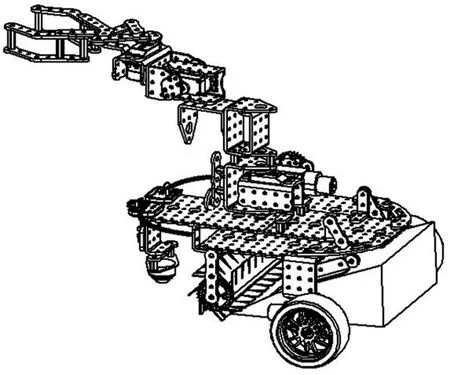
图1 整体结构图
机器人由本体与夹持臂两部分组成,考虑到机器人的承重能力,在本体的底盘主体采用铝合金板重叠组装,以及在与下方的储物箱连接方面采用小支杆连接,既起到了支撑作用同时也为储物箱的挪动范围起到了一个限位作用。本体下方配有滚轴装置。其特点是摩擦阻力小,易起动,功率消耗小,机械效率高,同时,其轴承性能对载荷、速度和运行速度的波动相对不敏感。滚轴后方装置一个储物箱,可以用来存储植物种子,当机器人检测到下方为规定播种区,则会用滚轴进行种子的播种工作。机械手能自动对果实进行分类,将成熟的果实分成一类,未成熟的分为一类,无法识别的果实则标记等待用户进行筛选。通过机械手自动识别后,会自动将果实采摘下来,放置在边上。机械手采用3个舵机控制,让机械臂做到全方位地夹取。同时,考虑到机械手夹取物件的承重,本机在机械手底部舵机连接处增加了环形滚动块,做到了一个分力支撑减少了舵机本身的重量负载,以及优化了机械臂转动的流畅度。车轮方面选用万像减震轮作为前车轮,做到控制方便。滚轴零件方面分为3D打印件滚筒以及天然橡胶材质的软滚筒,做到针对不同种子都可以进行高效播种。
1.2 转向结构设计
机器人的前轮采用了一个滚珠式全向移动轮,后轮为驱动轮,采用直流电机驱动,提供机体主要前进动力。机器人通过后侧两个驱动轮与前端一个全向轮组成了一个稳固的三角形力学结构,为机器人整体提供了可靠的承载能力。在转向方面采用的是两个独立的直流电机驱动轮进行正反转和差速转向控制,达到多功能农用机器人在转向方面的灵活与快速。以及在多功能农用机器人工作时也能够达到多级调速,针对不同的工作环境改变不同的运动速度,以到达理想的工作效果。
2 驱动轮差速转向运动模型及分析
机器人的底架由后侧两个驱动轮和前端一个万向轮组成,直流电机通过减速器直接驱动驱动轮。驱动电机正反转带动机器人前进和后退,通过其左右电机的旋转转速差实现机器人的转向。样机采用额定功率1.3W,额定电压6V,额定转速1280r/min,减速比为6.25,电流为1A的直流减速电机驱动,其动力源由两个12V的锂电池串联组成。图3是一个简化的多功能农用机器人的转向运动模型。假设直接电机驱动轮相对于地面只做纯滚动,由机器人的运动学原理,分析可知:
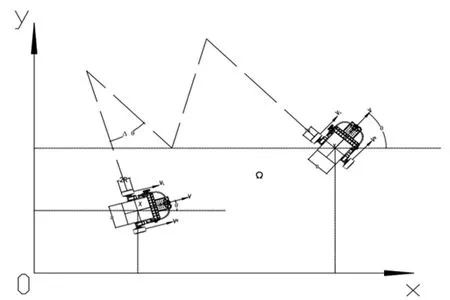
图3 转向运动模型

式中:V为机器人的瞬时线速度;Ω为横摆角速度;Vr为右轮线速度;Vl为左轮线速度;D为驱动轮的轮距。
令机器人的转弯半径为R,则有:

分析可得,机器人的运动状态有三种,分别是:
(1)当Vr-Vl=0且Vr+Vl≠0时,机器人线速度V=Vr=Vl,横摆角速度Ω=0,转弯半径R→∞,此时,机器人做直线运动;
(2)当Vr=-Vl时,机器人线速度V=0,横摆角速度,转弯半径R=0,表示机器人原地转弯;
(3)当Vr-Vl≠0且Vr+Vl≠0时,机器人线速度V=,角速度,转弯半径,表明机器人围绕某一圆心,做半径为R的转弯运动。
多功能农用机器人可以通过arduino mega2560开发板进行控制与调节达到直线运动、转向以及转圈等多种运动。
3 静应力分析及结构改进
机器人的整体结构材质由合金钢组成,在最初的材料选择方面有合金钢和铝合金两个方面的选择,虽然从经济效应上说铝合金的价格要比合金钢低,但是考虑到多功能农用机器人的整体承重力,在使用寿命以及耐磨程度上要比铝合金高,可以适应的环境也多,考虑到多功能农用机器人的功能性,合金钢比铝合金要更加耐腐蚀,安全性也更高。
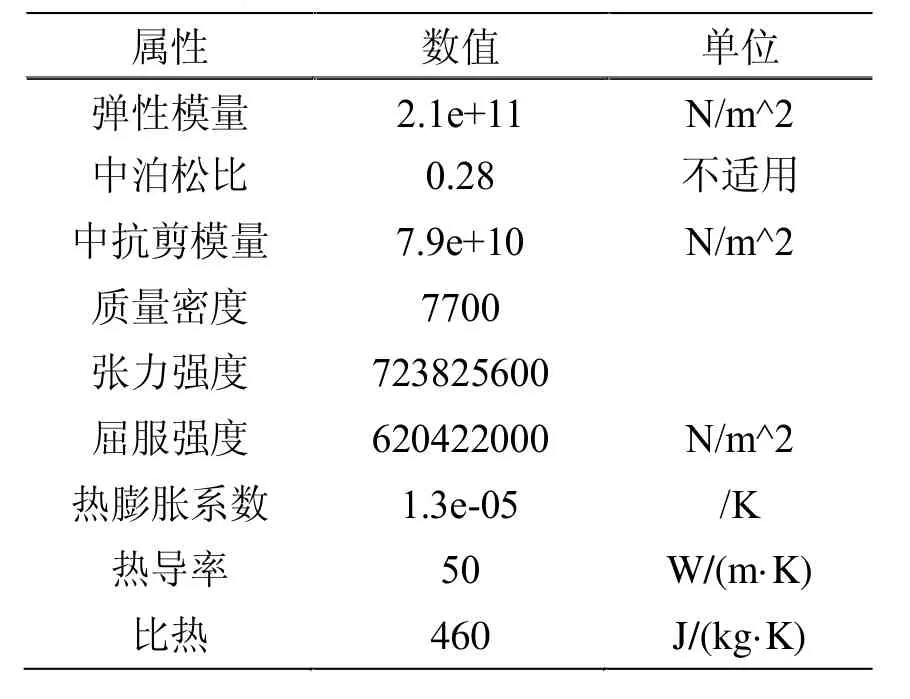
表1 合金钢材料具体分析
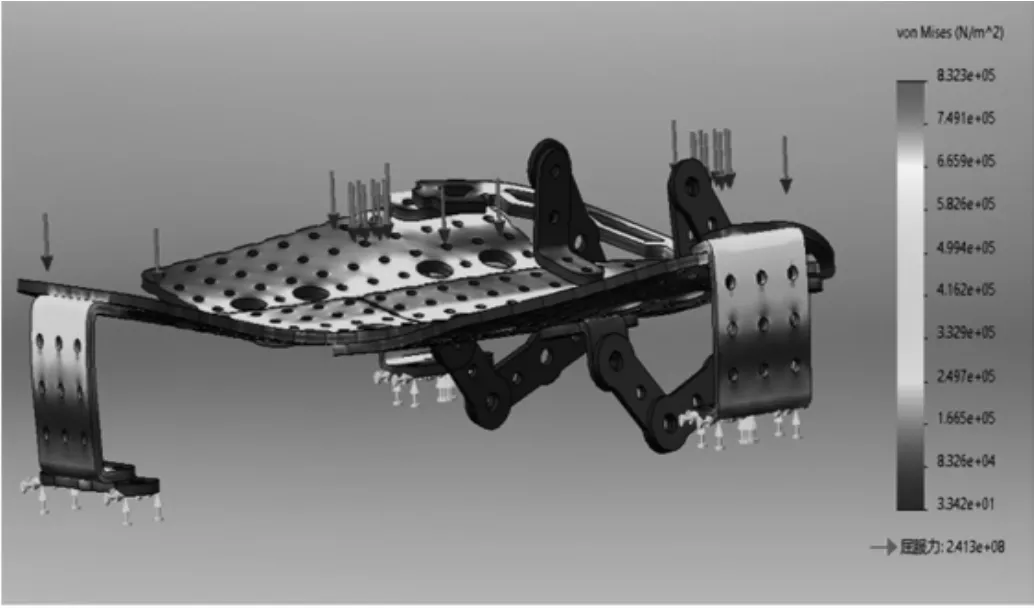
图4 最初压力分析图
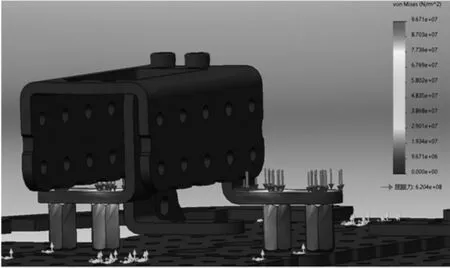
图5 改进结构后分析图
采用solidworks进行上底座的底盘受力分析,负载强度约5kg。考虑到极限的材料受力,应力测试分析约为49N。
在最初的仿真模拟中发现在机器人的底板结构承重能力较差,重力支撑点少,容易造成下基板的底座塌陷。在研究改良后,增加了底板的合金板厚度以及数量,在一些受力薄弱的地方增加了承重板,机器人的受力中心在手爪以及机器人中心,所以改进后的方案是在最底下的一个舵机框架上增加承重的铜柱,让整个机械手臂的力能够集中在中心然后通过加厚的合金板均匀的分散到全向轮以及驱动轮。
4 结束语
本文在基础的农用机器人上添加了其他的多功能模块,并且研究多功能农用机器人的转向结构,再通过多种数据的对比以及结构的优化,选用差速运动模型演示,让多功能农用机器人在工作中能够快速的运动转向,并且优化了承载能力。
