基于机器视觉的农业智能运输小车设计与开发*
2021-03-22李浩欣陈龙崇韩钰绵
宋 雷,李浩欣,郭 顺,徐 航,陈龙崇,韩钰绵
(广东技术师范大学 机电学院,广东 广州 510635)
现代科学技术飞速发展,人工智能技术在农业中也得到了大量的应用。在农业生产中对物资进行短距离运输的需求较多,目前仍然以传统的机电设备或人力作为运输方式,采用人工智能技术解决农业短距离运输的问题将对农业的发展提供有效的技术支撑。
目前智能运输设备已有一定的研究进展,例如AGV(自动引导运输车)[1]在设定好的路径上通过自动引导装置自动行驶,在物流仓储中的应用可以提高货物的流动性和灵活性;王蕾[2]等人设计的智能物流小车中应用了A3C算法,使小车拥有较高的避障能力;卢忠亮[3]等人开发的智能物流小车结合射频识别技术对线路或物件的电子标签进行识别,提高了物流小车在运输过程的路径识别和定位能力,大幅度节省了运输的成本。从上述文献可以发现人工智能技术可以较好地解决短距离运输问题,设计开发基于人工智能农业智能运输小车必将大幅度提高农业生产效率。
本文基于图像识别,运动控制等技术开发设计了一款应用于农业生产的短距离运输智能运输小车。该小车以Arduino作为控制核心、OpenMV作为机器视觉模块、LM298作为驱动模块、JQ8900-16P作为语音播报模块、同时采用麦克纳姆轮作为运动机构,通过以上元器件的共同合作下从而实现智能运输小车的二维码识别、颜色识别、路径规划、全向运动等智能运输要求。能够在复杂的环境条件中快速达到运输目的。
1 总体方案
该智能小车的总体方案如下图1所示。
本系统主要由Arduino控制模块、摄像头模块、电机底盘模块、驱动模块、电源模块、语音播报模块、舵机及平板机械支架构成组成。Arduino作为本系统的控制核心,利用摄像头采集过来的数据通过黑白二值化,以此判别障碍物位置,交通灯情况,最终区域等关键数据。摄像头对障碍物准确定位,确定其坐标位置,同时判别规定的各功能区域坐标,单片机通过返回的坐标位置结合PID算法,给定LM298驱动PWM输出形成闭环控制系统,从而控制小车躲避障碍物行驶。同时,可通过修改算法中各区域的颜色阈值对现场环境作出适应。
1.1 智能小车的机械结构设计
小车的总体结构分为三大部分:底盘承载与运动机构、货仓结构设计、摄像头固定调节机构。小车通过摄像头识别二维码之后打开相应的仓门,发出语音提醒,装入货物,关闭仓门,小车规划路径走到相应的收货地点。在小车行驶的过程中自动识别障碍物,交通灯等,遵守交通规则。小车到达终点后发出语音提醒,识别二维码取出货物,自主规划路径返回出发区域。
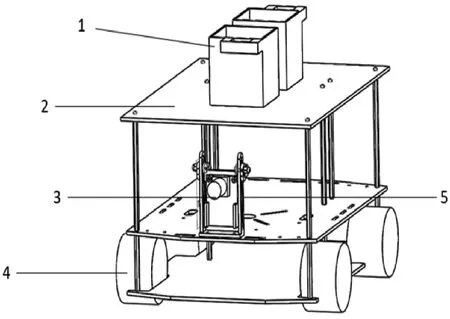
图2 智能小车的总体结构
(1)智能小车的底盘承载运动机构设计
小车的车体采用了矩形的四轮机构。车轮采用了瑞典麦克纳姆公司的专利——麦克纳姆轮[4](如图3)。麦克纳姆轮的结构组成与全向轮相似,都是由轮毂和辊子组成,轮毂是整个轮子的支架,辊子则是安装在轮毂上的鼓状物。但是全向轮的轮毂和辊子的转轴相互垂直,麦克纳姆轮的轮毂和辊子的转轴成45°角[5]。同时麦克纳姆轮可分为左旋轮以及右旋轮。

图3 麦克纳姆轮实物图
小车车体通过4个电机的精确调速控制4个麦克纳姆轮[6]不同的旋转方向实现小车的全向运动。四个车轮朝着同一个方向旋转,便可使小车前进或者后退;对角的车轮旋转方向相同,对角间的车轮旋转方向不同,便可使左平移或者右平移;同侧的车轮旋转方向相同,而不同侧的车轮旋转方向不同,即可实现小车在原地360°旋转;若只是驱动对角的两个车轮即可实现小车在45°方向上斜进。
由于小车的整体车身重量为2kg~3kg,底盘和驱动轮受力较大,因此采用重量轻强度高的铝合金板做底盘。
原底盘辅助连接结构采用轴承式连接(如图4),该结构可以通过改变底盘形状和角度在较复杂地形行进,但是轴承式有连接稳定性差,受力易变形,结构不可靠等缺点。由于底盘需要承受较大载荷,故对此辅助连接结构进行一些改进。

图4 底盘的轴承连接
采用小钢板(如图5)进行连接,通过8个螺栓与底盘螺孔对应连接,钢板结构受力面大,不容易发生旋转和变形。改进后,小车底盘结构稳定性提高了,可靠性也有提升,小车在行进中,底盘不会发生变形,麦克纳姆轮灵活性和稳定性也得到提高。
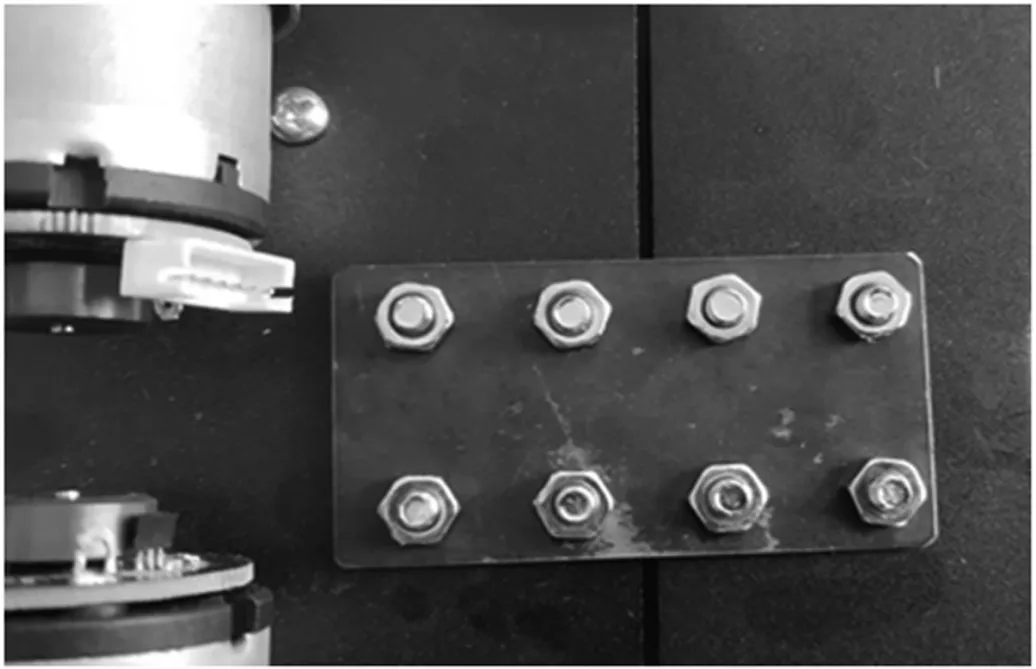
图5 底盘的小钢板连接
(2)摄像头固定调节机构设计
摄像头固定结构、摄像头高度调节结构和摄像头支架为自主设计,铝合金板材加工。摄像头高度和角度调节螺母的松紧程度使摄像头上下移动,拧紧螺母后固定(如图6)。
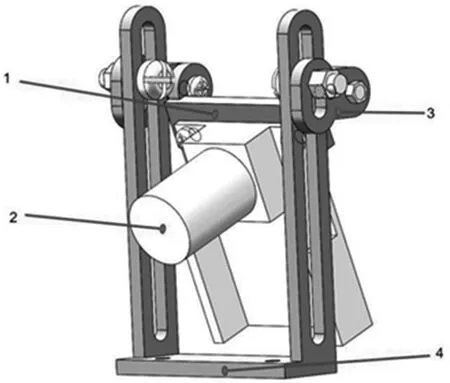
图6 图像采集结构装配图
1.2 主要元器件的选型
(1)主控制器的选型
采用Arduino mega-2560作为主控器。Arduino是一款开源硬件,库函数封装完全,资料齐全,接口丰富,扩展性高,开发简单,适合开源项目以及原型机的快速开发。完全可以实现本系统的各个设计任务,具有良好的响应速度。
(2)视觉采集装置选型
OpenMV是比较适合本项目的一个机器视觉模块,成本低,功能强大[7]。OpenMV具有众多硬件接口,能够高效率地实现机器视觉的算法。而且可用USB接口用于连接电脑上的集成开发环境OpenMV IDE,提供Python编程接口[8],协助完成编程、调试和更新固件等工作。
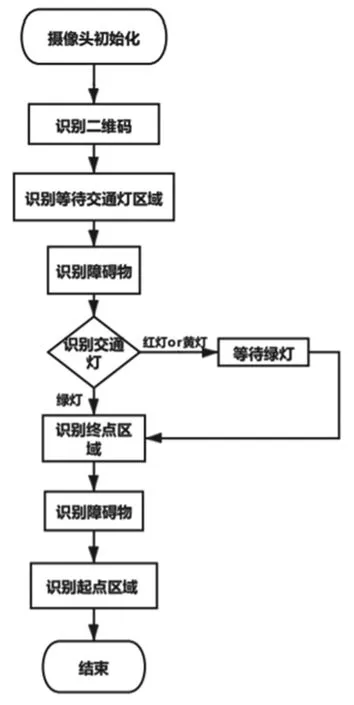
图7 图像识别流程图
2 智能小车的PID控制
自动控制原理是近年来在各个行业都比较受欢迎的一项技术。随着直流电机制作工艺的提高,在电气领域被应用的也越来越广泛。尤其是在近几年来的机器人竞赛中,其中传统的PID控制是最受欢迎的[9]。PID控制简单地说,是根据理想的运动和实际运动的差别构建一个偏差量,将偏差按比例、积分和微分通过线性组合构成控制量,对被控对象进行控制。除此之外PID还可以采用增量式表达式,对于机械部件来说,计算机每次只输出控制增量即可,从而减少了机器人故障发生时的过冲误差累积等影响,并能实现无扰切换,同时PID控制也变得更加灵活了[10]。连续的PID控制,它根据给定值r(t)与实际输出值c(t)构成偏差:e(t)=r(t)-c(t)。将偏差的比例(P)、积分(I)和微分(D)通过线性组合构成控制量,对受控对象进行控制。其控制规律为:
传递函数为:

根据控制规律,得到n-1时刻的控制量:

可简化为:

式中,Kp为比例系数,Ti为积分时间常数,Td为微分时间常数;Ki=Kp/Ti,为积分系数;Kd=Kp*Td,为微分系数。
在本文的智能小车设计中,智能小车需要多次启停,故采用增量式PID控制用于对小车速度调节和姿态控制。
3 OpenMV图像识别
通过OpenMV摄像头进行二维码图像识别,识别出需要运输的物料和小车行驶的路线,通过软串口通讯将信息传输给Arduino。在小车行驶的过程中,识别道路上的红绿灯以及障碍物,将红绿灯与障碍物的信息发送给小车,最后识别出终点区域,将终点区域信息发送给小车。
采用OpenMV进行图像识别过程中需要先对OpenMV中的一些相机参数进行设置,首先是采用sensor.reset()对感光元件初始化;第二需要选择合适的分辨率和像素的模式,分辨率一般通过采用sensor.QVGA选择320*240的QVGA模式,像素模式在OpenMV有灰度模式和色彩模式,本文研究的智能小车需要进行颜色识别,故通过sensor.RGB565采用色彩模式;第三需要通过sensor.set_auto_gain (False)、sensor.set_au -to_whitebal(False)关闭白平衡,便于获得稳定的图像。
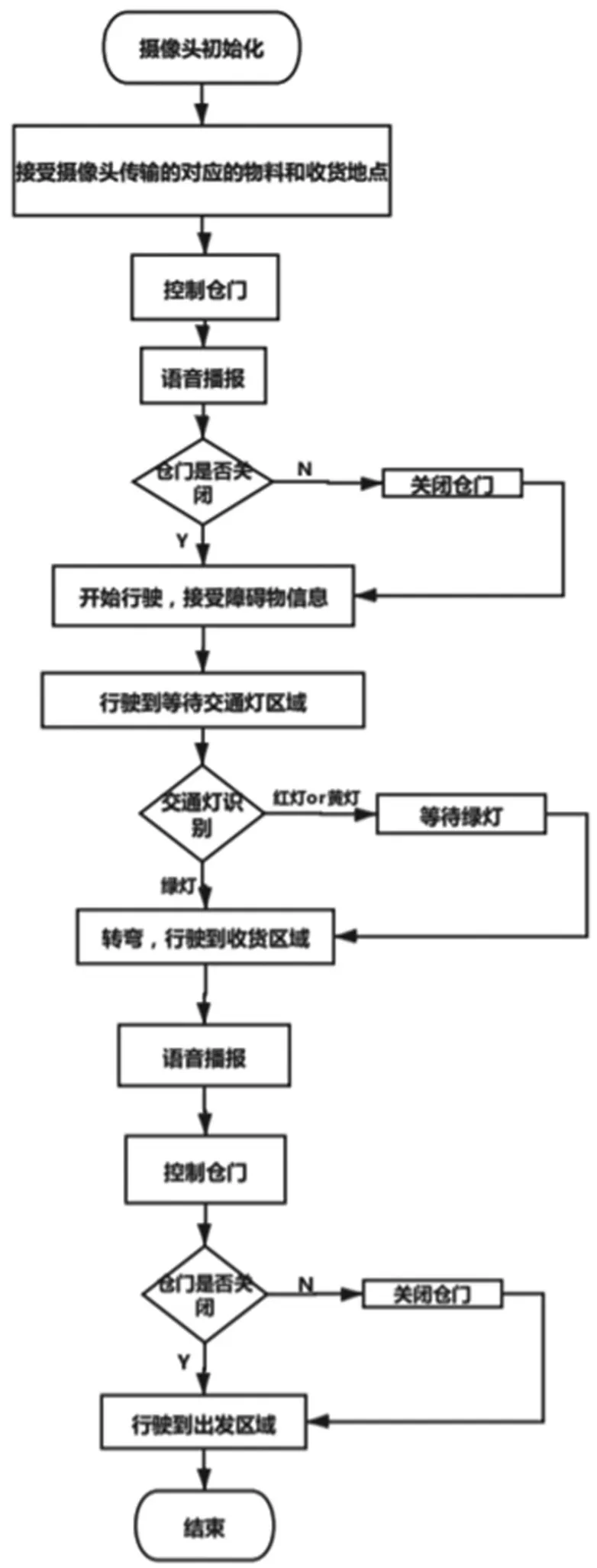
图8 程序流程图
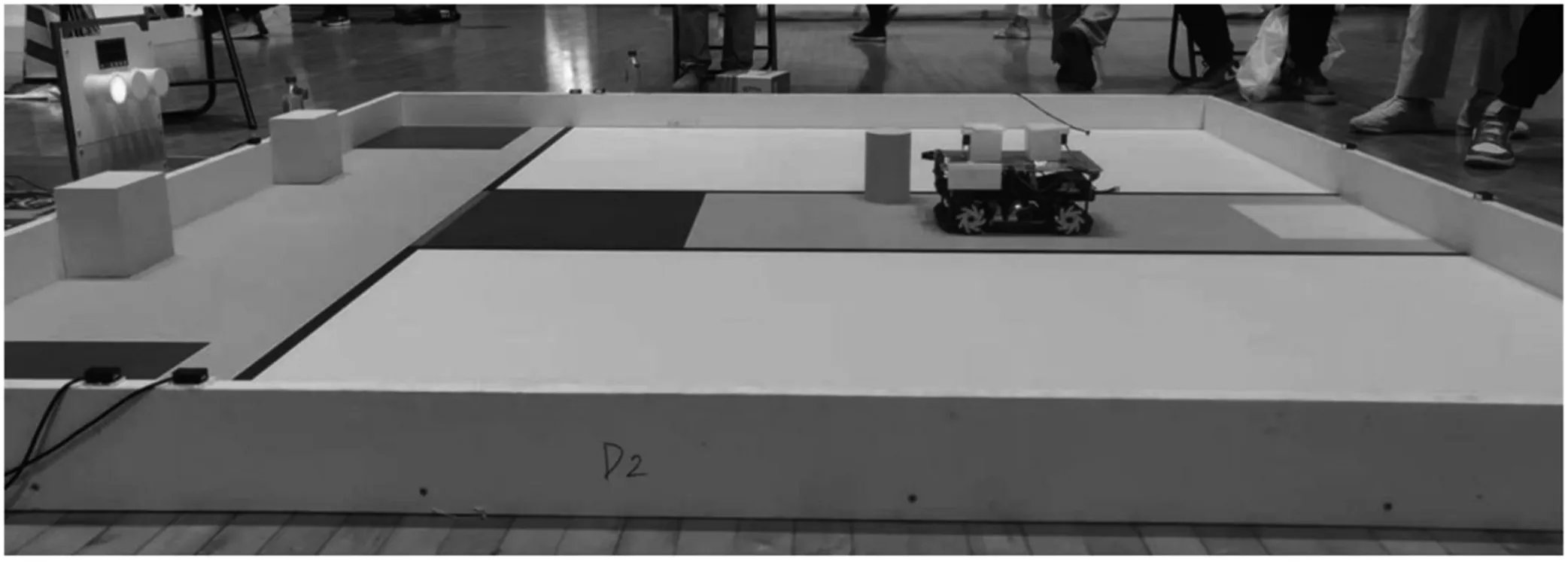
图9 智能小车整机测试
4 智能小车的系统集成及测试
4.1 控制程序总体结构
系统上电,运行程序,进行自检。自检完成,由OpenMV识别二维码,将识别后的信息发送到Arduino,Arduino控制语音播报模块以及仓门做出相对应的要求,其次控制麦克纳姆轮底盘行驶到指定的地点。在行驶过程中,OpenMV将识别到的障碍物以及交通灯的信息发送给Arduino,Arduino控制麦克纳姆轮底盘避开障碍物,并在相应的区域等待交通灯。到达指定的收货区域后,进行语音播报并且控制相应的仓门,取出物料。最后通过Arduino控制麦克纳姆轮底盘自主规划路径回到出发区域。
4.2 图像识别子程序
OpenMV M7摄像头上电,进入程序,初始化摄像头,设置摄像头的时间等参数,初始进行二维码的识别,将识别出来的信息通过串口发送到Arduino,Arduino控制舵机打开相对应的仓门以及在指定的道路上行驶。行驶过程中进行对障碍物的识别,在每一帧的图片中用矩形框住障碍物,用函数获取矩形的中心x,y坐标发送给Arduino,Arduino控制小车躲避障碍物行驶,并且在行驶过程中对红绿灯进行识别,将识别到的红绿灯信息传输到Arduino中,如果是红灯时,Arduino控制小车停止,绿灯时控制小车正常行驶,通过了有红绿灯的道路后,再次进行障碍物的识别,控制小车躲避障碍物行驶,最后在行驶中进行终点区域的识别,控制小车到达指定的终点区域。
4.3 智能小车的测试
将智能小车全部组装好放入模拟环境中测试智能小车的运转情况,在测试过程中智能小车能够正确发出对应的语音提醒以及打开对应的货仓,正确的识别二维码、交通信号灯,准确地识别障碍物并自主进行路径规划,到达指定收货地点并发出相应的语音提醒,待扫描二维码取出货物后自主规划路径回到出发区域。
5 结束语
本文设计开发一种农业智能运输小车,该小车利用OpenMV进行图像识别,能够精准地对二维码、障碍物等进行识别;采用麦克纳姆轮作为移动机构,通过Arduino进行运动控制,使农业智能运输车能够全向移动,快速将农业物资送至指定地点。本文设计开发的农业智能运输小车具有较高的运输效率,实现了人工智能技术与农业生产装备的有效集成,可以大幅度提高农业生产效率。
