一种基于TCMS系统的受电弓升降自动控制策略
2021-03-20林宝锋夏益韬
林宝锋,夏益韬
(中车南京浦镇车辆有限公司,南京 210031)
云南红河州现代有轨电车1号线全长24.5 km,共设置23个站台,其中15个站台设有充电轨(刚性网段,升半弓控制),在部分站台之间设有接触网(柔性网段,升全弓控制),以及公共道口和部分无电区间(降弓控制),其中刚性网段和柔性网段的升弓高度不同[1]。在车辆运行过程中,司机需要根据前方路段的具体工况(刚性网段、柔性网段以及无电区),实时、频繁、准确的进行升全弓、升半弓和降弓操作[2]。为满足复杂工况下,频繁、可靠的升、降受电弓,避免因司机操作不当造成的受电弓受损,设计了基于TCMS系统控制的有轨电车自动升降弓控制方法,并借助地面信号系统现有信标数据,实现了复杂工况下,频繁升、降受电弓的全自动、精准控制[3]。
1 信标数据
根据项目ATC(Automatic Train Control,ATC)系统与TCMS系统的数据接口的定义,ATC系统车载设备实时将读取的地面信标ID(Identification)发给TCMS系统,信标的数据格式如表1所示,在列车运行线路中,柔性网段和刚性网段的入段位置和出段位置均设有信标,整条线路信标ID的编号是唯一的。
TCMS系统筛选和受电弓控制相关的信标ID信息,与线路中实际的位置做了“标签”和对应处理,转化成TCMS系统内部受电弓控制的触发信号,并结合车辆实时的状态数据综合处理,实现了列车行驶过程中不同接触网工况下的升、降弓的全自动精准控制[4]。并在激活端DDU(Driver Display Uint)控制界面上显示受电弓的具体状态,辅助司机进行安全驾驶。
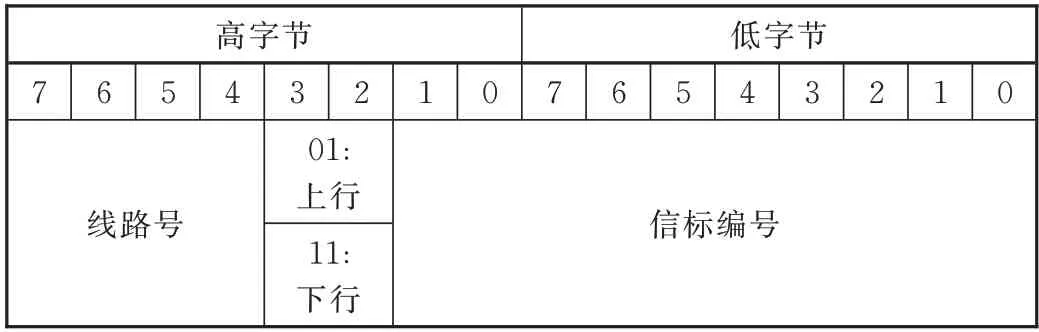
表1 信标数据格式
2 受电弓工作模式及控制原理
2.1 受电弓控制原理图
受电弓控制原理图参见图1所示[5]。
2.2 受电弓自动控制模式
在激活端将受电弓的控制模式切换到自动控制,TCMS系统根据实时信标ID信息,通过系统软件处理后准确识别列车所处的路段工况:柔性网段、刚性网段或者无接触网段,以及列车即将进入或者驶离该路段[6]。通过对运行线路及各站点的行驶轨迹的分析,建立以下4种受电弓控制模型,TCMS系统按照以下模式,对受电弓进行自动升、降控制[7]。
2.2.1站前折返站的受电弓控制
刚性网段的站前折返站点的信标布置以及列车运行轨迹示意图参见图2所示。
信标的命名定义:
FBxxxxxA和FBxxxxxB代表岔区用信标;
FBxxxxxC代表站台信标(刚性网段);
FBxxxxxQ代表柔性网段进网信标;
FBxxxxxZ代表柔性网段出网信标;
FBxxxxxL代表路口出网信标。
(1)升弓控制
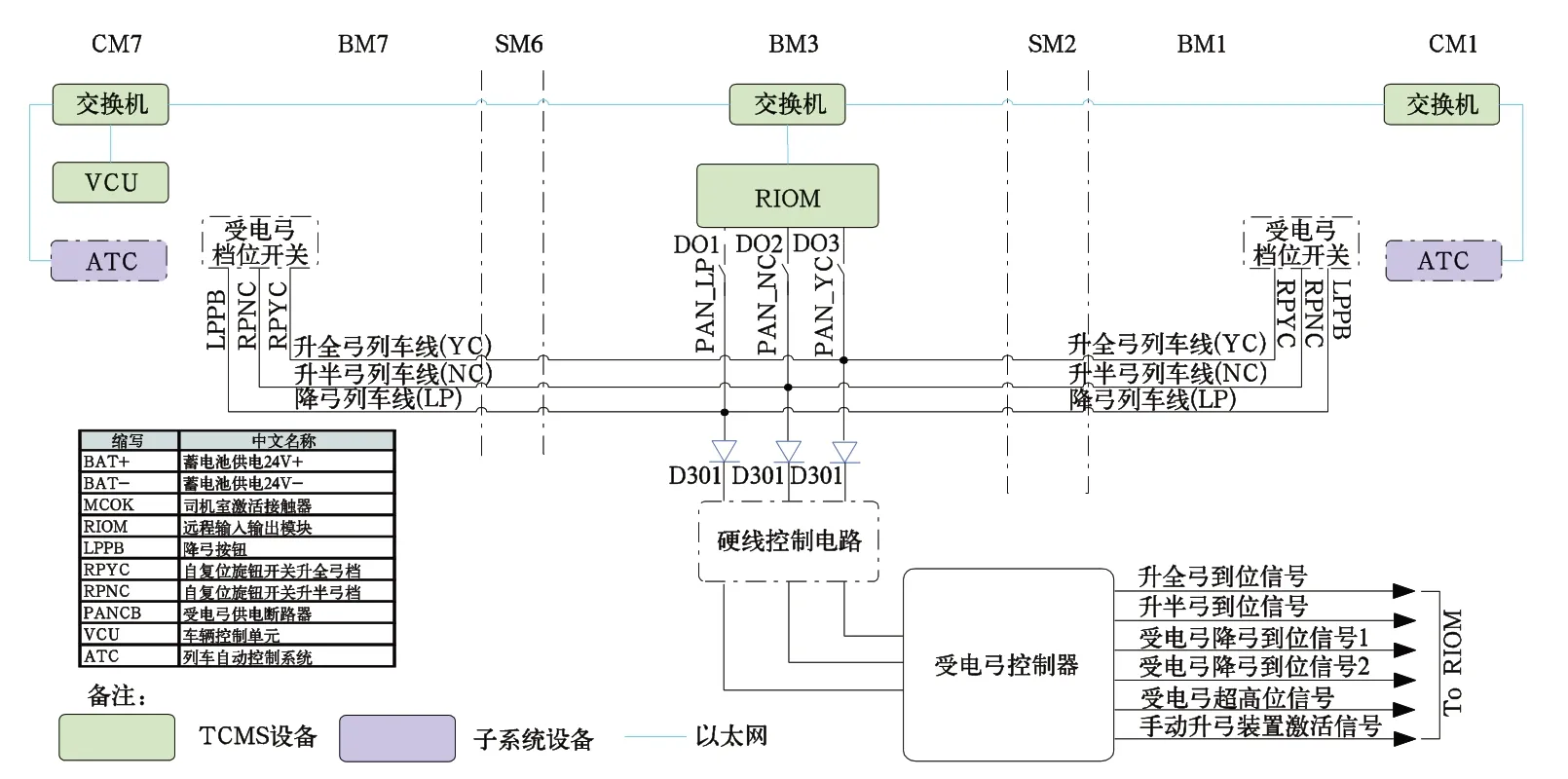
图1 受电弓控制原理图

图2 站前折返站信标布置示意图
ATC通信正常,头车司机室激活(上行方向CM1车为头车,下行方向CM7车为头车),列车上行,TCMS系统识别到头车ATC系统发送的进网信标(升半弓信标,软件定义)FB10101C或FB10102C激活(1 s脉冲);或者,列车下行,TCMS系统识别到头车ATC系统发送的进网信标(升半弓信标,软件定义)FB10103C或FB10104C激活(1 s脉冲)时,且受电弓控制在自动模式下,则TCMS软件进行以下处理:
①VCU开始计算里程(HVS_uiDistanceTAG=v1×T+v2×T+v3×T+v4×T+…,其中v1v2v3v4…为每个时刻的列车速度(DRV_uiTrainSpeed),T为程序周期),当列车行进的里程大于25 m(约为一列车车长,确保受电弓所处的位置在站台刚性轨区域内,具体数值根据信标位置和车载信标读取设备安装位置确定)时。
②或者,上行时,TCMS系统识别到尾车ATC系统发送的进网信标(升半弓信标,软件定义)FB10101C或FB10102C激活(1 s脉冲);或者,下行时,TCMS系统识别到尾车ATC系统发送的进网信标(升半弓信标,软件定义)FB10103C或FB10104C激活(1 s脉冲)时。
以上2个条件任意满足一个,且此时列车零速激活,且列车向后运行未激活时,则判定受电弓已经入刚性网段可以升半弓,TCMS系统通过RIOM输出1 s脉冲信号,升半弓列车线(NC)得电,并控制受电弓升半弓。
(2)降弓控制
ATC通信正常,头车司机室激活,列车按照上行/下行升半弓控制条件完成升弓(受电弓控制器反馈的升半弓到位信号激活)后,且受电弓控制在自动模式下,则TCMS软件进行以下处理:
①当列车零速信号从激活变化到非激活,且牵引请求激活(PRO_xTracReq=1)时。
②或者,上行时,TCMS系统识别到头车或尾车ATC系统发送的出网信标(降弓信标,软件定义)FB10103C或FB10104C激活(1 s脉冲);或者,下行时,TCMS系统识别到头车或尾车ATC系统发送的出网信标(降弓信标,软件定义)FB10101C或者FB10102C激活(1 s脉冲)时。
以上2个条件任意满足一个时,则判定列车即将驶离站台刚性网段,TCMS系统通过RIOM输出2 s(降弓继电器有1 s延时,所以输出2 s)脉冲信号,降弓列车线(LP)得电,并控制受电弓降弓。
2.2.2有柔性网或刚性网区域的受电弓控制
有柔性网或刚性网区域的信标布置以及列车运行轨迹示意图参见图3所示。
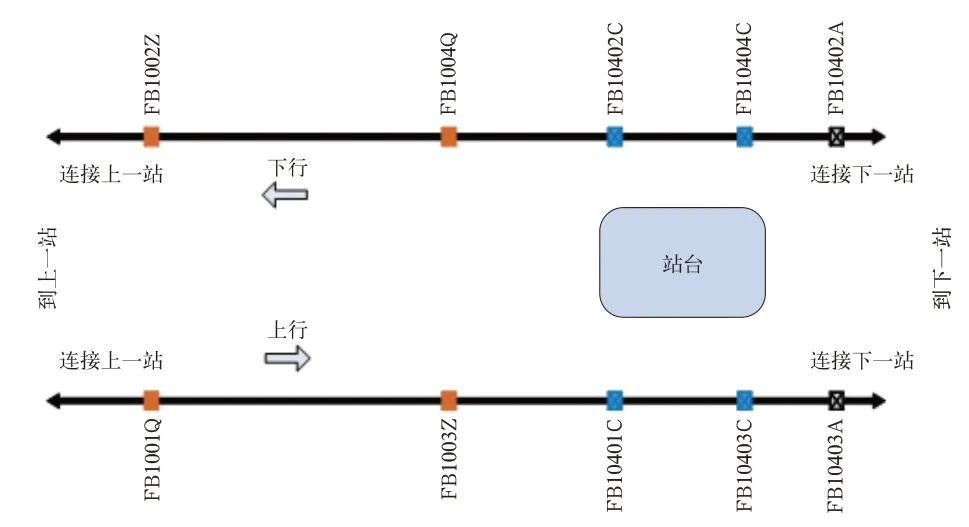
图3 有柔性网或刚性网区域的信标布置示意图
柔性网段升降弓控制:
(1)升弓控制如下
ATC通信正常,头车司机室激活,TCMS系统识别到头车ATC系统发送的进网信标(升全弓信标,软件定义)FB1001Q或FB1004Q激活(1 s脉冲),且受电弓控制在自动模式下,则TCMS软件进行以下处理:
①VCU开始计算里程,当列车行进的里程大于30 m(约为一列车车长,确保受电弓所处的位置在柔性接触网区域内,具体数值根据信标位置和车载信标读取设备安装位置确定)时。
②或者,TCMS系统识别到尾车ATC系统发送的进网信标(升全弓信标,软件定义)FB1001Q或FB1004Q激活(1 s脉冲)时。
以上2个条件任意满足一个,且列车向后运行未激活,则判定受电弓已经入柔性网段可以升全弓,TCMS系统通过RIOM输出1 s脉冲信号,升全弓列车线(YC)得电,并控制受电弓升全弓。
(2)降弓控制如下
ATC通信正常,且列车向后运行未激活时,且受电弓控制在自动模式下,CMS系统识别到头车或者车尾ATC系统发送的降弓信标(软件定义)FB1002Z或FB1003Z激活(1 s脉冲)时,则判定列车即将驶离柔性网段需要降弓,TCMS系统通过RIOM输出2 s脉冲信号,降弓列车线(LP)得电,并控制受电弓降弓。
刚性网段升降弓控制:
(1)升弓控制如下
ATC通信正常,头车司机室激活,TCMS系统识别到头车ATC系统发送的进网信标(升半弓信标,软件定义)FB10401C或FB10404C激活(1 s脉冲)时,且受电弓控制在自动模式下,则TCMS软件进行以下处理:
①VCU开始计算里程,当列车行进的里程大于25 m(确保受电弓所处的位置在站台刚性轨区域内,具体数值根据信标位置站台刚性接触轨实际长度调整)时。
②或者,TCMS系统识别到尾车ATC系统发送的进网信标(升半弓信标,软件定义)FB10401C或FB10404C激活(1 s脉冲)时;
以上2个条件任意满足一个,且此时列车零速激活(列车跃站时不会升弓),且列车向后运行未激活时,则判定受电弓已经入刚性网段可以升半弓,TCMS系统通过RIOM输出1 s脉冲信号,升半弓列车线(NC)得电,并控制受电弓升半弓。
(2)降弓控制如下
ATC通信正常,头车司机室激活,列车按照上行/下行升半弓控制条件完成升弓(受电弓控制器反馈的升半弓到位信号激活)后,且受电弓控制在自动模式下,则TCMS软件进行以下处理:
①当列车零速信号从激活变化到非激活,且牵引请求激活(PRO_xTracReq=1)时。
②或者,TCMS系统识别到头车或尾车ATC系统发送的出网信标(降弓信标,软件定义)FB10402C或FB10403C激活(1 s脉冲)时。
以上2个条件任意满足一个时,则判定列车即将驶离站台刚性网段,TCMS系统通过RIOM输出2 s脉冲信号,降弓列车线(LP)得电,并控制受电弓降弓。
2.2.3站后折返站的受电弓控制
站后折返站点的信标布置以及列车运行轨迹示意图参见图4所示。
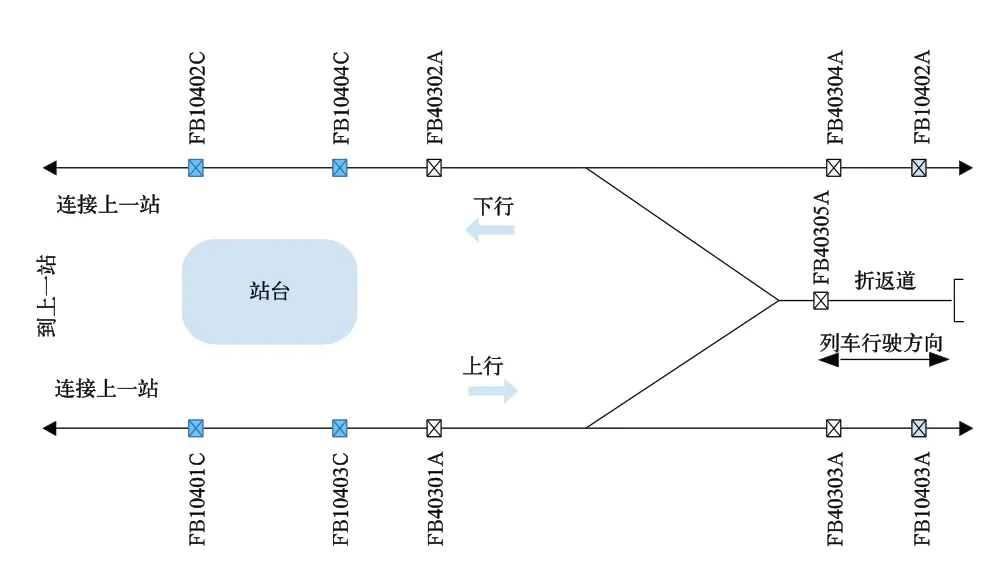
图4 站后折返站点信标布置示意图
站后折返站刚性网段的受电弓升弓及降弓控制与上文中的刚性网段的升弓和降弓控制一致。列车换端,TCMS系统软件中实现“头车”状态的切换,并按照上述逻辑实现受电弓自动升、降弓的控制。
2.2.4无接触网区域降弓控制
在无刚性接触轨的站台、公共道口及其他无接触网的区段,列车保持降弓状态,利用车载超级电容蓄电运行[2]。
为避免在无接触网区段举弓运行,确保列车运行安全。在列车驶离刚性接触轨站台区段,TCMS系统有3次降弓指令(参见文中刚性网段降弓控制);在列车驶离柔性接触网区段,TCMS系统有2次降弓指令(参见文中柔性网段降弓控制);在特殊运行环境:高度较低高压供电线及民用供电线,高架桥等其他空中固定障碍物,TCMS系统选择这些特殊区域就近的信标,通过软件做了“标签”和处理,转化成降弓控制的触发信号,强制列车在此特殊路段降弓行驶。
2.3 受电弓手动控制模式
当TCMS系统严重故障不能控制列车时,进入降级模式,司机通过激活端DDU的控制界面,将受电弓的控制模式切换到手动控制,操作司控台上的受电弓控制按钮,实现升、降弓硬线控制。
3 受电弓的状态监测及安全策略
TCMS系统结合整车的信号以及受电弓控制器反馈的状态信号,综合诊断出受电弓实时状态及故障报警。司机可通过激活端DDU查看受电弓的状态:升弓中、降弓中、降弓到位、升全弓到位、升半弓到位和未知状态,当发生异常时,能够准确的控制受电弓动作[8],防止受电弓被刮弓,具体控制如下:
(1)当升弓指令和降弓指令同时激活时,TCMS系统自动控制RIOM输出2 s脉冲信号,降弓列车线(LP)得电,并控制受电弓降弓。
(2)当触发升弓指令,超高位信号激活时,受电弓执行自动降弓,激活端DDU上显示“受电弓超高位故障”,提醒司机受电弓升弓异常。
(3)当触发升弓或降弓指令后,在规定时间内RIOM没有采集到相应的位置传感器信号:升全弓到位信号、升半弓到位信号和降弓到位信号时,DDU上报受电弓传感器故障,提醒司机受电弓异常。
(4)当ATC系统与TCMS系统的通信中断时,激活端DDU上“自动/手动控制”切换软按钮显示为红色并闪烁,同时伴有1 Hz警示音;提醒司机将受电弓控制切换到手动模式,屏蔽ATC信标触发的受电弓自动控制,同时,TCMS系统控制RIOM持续输出降弓指令,直到ATC通信恢复正常或者激活端DDU上“自动/手动控制”按钮被切换到手动模式,避免在信标信号不可信时,系统对受电弓的不可靠控制。
(5)当TCMS系统检测到列车休眠信号激活时,延时100 s后,TCMS系统通过RIOM输出2 s脉冲信号,降弓列车线(LP)得电,并控制受电弓降弓。
4 结束语
现代有轨电车作为一种新型、高效、绿色环保的现代化公共交通系统,既可以作为地方中心城市的骨干交通工具,也可作为大城市的铁路及地铁等大运量交通工具的辅助交通工具,其灵活、高效的特点,能够提供优质、高效的公共交通服务需求。文中提出的现代有轨电车受电弓自动控制策略[9],有效的解决了车辆在运行过程中充电轨及接触网方式受流的自动切换及控制[10],提高了有轨电车的运行效率及车辆的可靠性。
