玻璃幕墙清洁机器人的结构设计
2021-03-18刘元昊陈育羽
刘 晗,刘元昊,陈育羽,柴 瑞
(哈尔滨理工大学荣成学院,山东 威海 264300)
0 引言
在我国经济迅猛发展与城市不断扩大的今天,城市中的高楼大厦鳞次栉比,玻璃幕墙作为一种新颖的高端建筑墙体,是如今高层建筑的宠儿。玻璃幕墙的广泛应用也催生了清洁困难这一显著问题,传统的人工清洁不仅费时费力而且有很大的危险性,本文设计的清洁机器人可以有效降低危险性和人工成本。
1 清洁机器人的结构设计与分析
1.1 清洁机器人结构
玻璃幕墙清洁机器人外观与内部结构如图1所示,它主要由底轮清洁装置、减速齿轮机构、驱动电机、封闭式内腔、离心叶轮组成,通过负压原理实现吸附运动,双底轮加装擦布实现清洁功能与转向功能。

图1 机器人外观与内部结构
机器人若要完成清洁任务,则需满足以下条件:
(1) 吸附条件:真空负压产生的摩擦力要大于机器人的自身重力。
(2) 驱动条件:电机产生的驱动力要大于机器人自身重力、清洁布料与玻璃面接触时所产生的滑动摩擦力之和[1]。
1.2 清洁机器人工作原理
清洁机器人的具体工作过程如下:以机器人两侧驱动电机作为动力源,电机启动后通过减速机构带动底轮转动,控制机器人的转动与走向,气体由底轮吸入进入封闭内腔,位于机器人中部的电机带动离心叶轮旋转产生离心力将密闭腔内的空气排出机器人壳外产生吸附力实现机器人的吸附功能,由两侧驱动电机的正向与反向旋转驱动底轮清洁装置的正转与反转,在底轮清洁吸附装置上套有清洁擦布,在机器人整体的运动过程中清洁擦布与工作接触面之间产生摩擦力,实现机器人的清洁功能。
1.3 机器人的蜗轮蜗杆+齿轮减速机构
在机器人吸附幕墙行走进行清洁作业时,需要作为动力源的电动机提供较大的转矩和较低的转速,而机器人中使用的电机转速较高,需要经过减速装置进行减速处理,以达到机器人工作所需的转速和转矩,实现正反向运动及运动速度的转换。本文设计的机器人采用的是蜗轮蜗杆传动+行星减速机构,蜗轮蜗杆传动如图2所示,减速装置内部的行星轮系结构如图3所示。
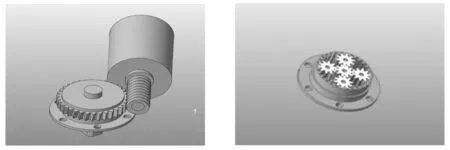
图2 电机与减速装置之间的蜗轮蜗杆传动 图3 减速装置内部的行星轮系结构
1.4 内部密封内腔设计
机器人采取内、外腔设计,外腔用于元器件排线,内腔用于涡轮电机向外吸气,使机器人内部形成真空,通过负压来吸附在需要清洁的玻璃幕墙上;电机减速机构也安置在内腔中。机器人封闭内腔整体剖切视图如图4所示。

图4 机器人封闭内腔剖面图 图5 离心叶轮
1.5 离心叶轮装置
机器人的吸附机构由如图5所示的圆形背板以及安装在涡轮电机上向前突出的多个角度间隔开的叶片组成。其工作原理是:圆盘高速旋转,内腔的空气在叶片的带动下向大气排出,形成约5 000 Pa的负压差,让机器人的底盘在负压的作用下与玻璃之间产生摩擦力,使机器人在自身的重力作用下也能稳定行走。
2 机器人整体力学分析与计算
2.1 力学平衡分析
利用负压原理在玻璃上实现吸附功能的擦玻璃机器人,其机身能否稳定吸附在玻璃上,取决于其所受力是否平衡[2]。本文设计的机器人是通过离心叶轮旋转产生的负压将机器人压在工作表面上来实现吸附功能。当机器人静止吸附在工作表面时,其受力情况如图6所示。机器人需满足如下吸附条件:
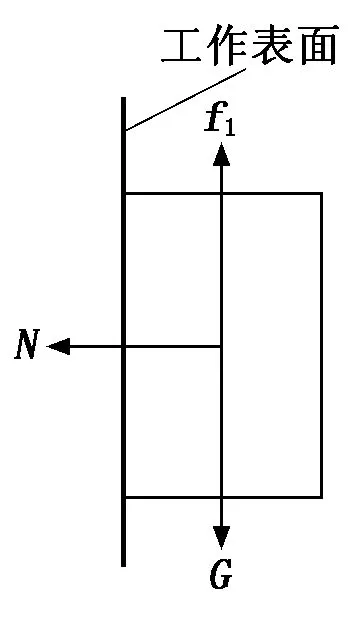
图6 机器人作业时的受力分析
f1=μ0N≥G.
(1)
其中:f1为机器人与工作面之间接触产生的摩擦力;μ0为机器人与工作表面间的平均摩擦因数;N为离心叶轮工作产生的负压给予机器人的正压力;G为机器人的自重。正压力N由下式计算:
N=(p0-p1)S1.
(2)
其中:p0为标准大气压;p1为机器人的封闭内腔的空气压力;S1为机器人底轮与工作表面之间的接触面积。由式(1)和式(2)联立可得出:
(3)
若期望机器人在工作表面自如行走则需满足式(3)所列出的基本负压条件。
2.2 运动参数分析
机器人若想实现正常的清洁工作,不仅需要稳固地吸附在工作表面,而且还需要在稳固吸附的基础之上能够正常地向各个方向运动,即在满足固定的吸附条件之外还应该满足合理的驱动条件。当机器人沿工作表面竖直向上运动时,应满足如下条件:
(4)
其中:F为驱动电机经过减速装置减速后输出的驱动力;f2为在机器人运动过程中产生的摩擦力,其方向与机器人的运动方向相反,大小为机器人与工作表面之间的摩擦因数与负压产生的压力的乘积。
摩擦力的大小主要取决于负压条件带给机器人的压力,压力的大小由大气压强与机器人封闭内腔的压强差值决定。设想机器人工作环境处在标准大气压下,则摩擦力的大小主要由封闭内腔的压力大小决定,若在理想条件下封闭内腔完全封闭不会产生漏气,则机器人运动过程中满足以下条件即可:
F>G+μ0N=G+(p0-p1)S1.
(5)
若将封闭内腔会产生漏气考虑在内,机器人需要满足下列条件才能在工作表面自如运动:
F>G+μ0N=G+μ0(p0-p1-Δp)S1.
(6)
其中:Δp为封闭内腔由于漏气引起的压降。
式(6)为机器人正常工作运动中需满足的驱动条件,即驱动电机输出的转矩越大,则机器人正常工作的概率越高,由驱动引起的故障也会减少。
图7为机器人正吸附在大型3D打印机的侧面玻璃进行清洁工作。
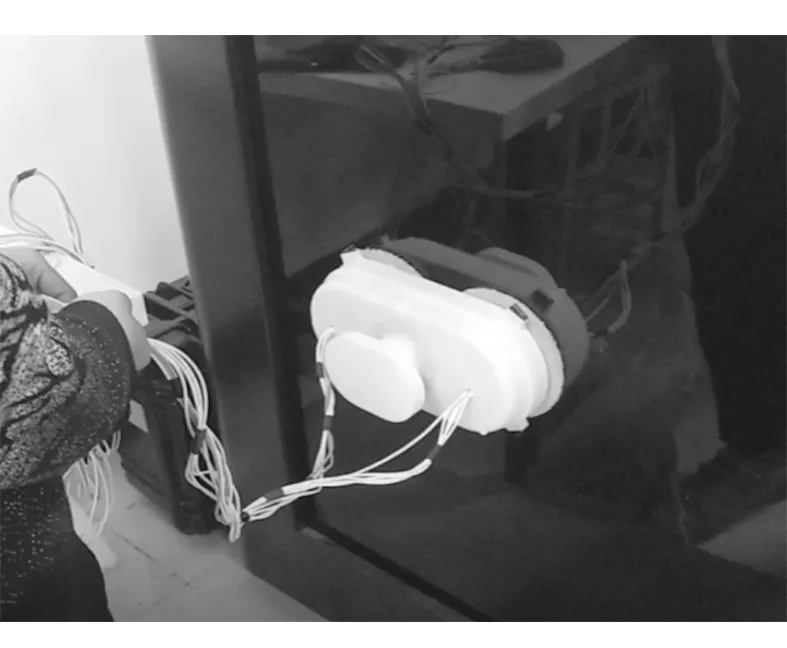
图7 机器人进行清洁工作
3 结语
本文设计的清洁机器人通过负压吸附的原理可以实现玻璃吸附与正常清洁工作的运动,采用PLA材料打印的机器人整体结构可以承受离心叶轮产生的负压。此结构的机器人尚无法清洁玻璃直角转弯处的灰尘与污渍,因此对其结构还需作进一步的优化与完善。
