基于ANSYS Workbench回转式抽拉机械手平台的研究
2021-03-18高小康李成群柴起茗
高小康,李成群,柴起茗,刘 磊,何 磊
(1.华北理工大学 机械工程学院,河北 唐山 063000;2.唐山晟群科技有限公司,河北 唐山 063000)
0 引言
近年来,随着我国工业技术的飞速发展,自动化仓库越来越多地出现在人们的视线中,而堆垛机作为自动化仓库的运输工具,对其要求也更加多样和严格[1]。由于仓库存储物品的多样化和复杂化,堆垛机上机械手的取货方式也逐渐多变起来。目前堆垛机上主要用到的取货方式为伸缩式机械手,但是其在一些特殊的工作场合不能满足要求,因此设计了一种不同于伸缩式机械手的机械手结构,即回转式抽拉机械手。
单立柱堆垛机主要由升降机构、行走机构和抽拉式机械手平台部分组成。相较于双立柱式堆垛机,单立柱堆垛机在自动化仓库的应用范围更加广泛,故本文选择单立柱式堆垛机进行分析[2]。设定的工况条件为:载重120 kg,由于不对机械手平台进行动力学速度方面的分析,故不对堆垛机工作时的速度进行设定。抽拉式机械手平台安装在提升架上,平台可以通过上下移动来改变起升高度,通过底部的移动行走机构改变横向位置,最后通过抽拉式机械手平台存取货箱。
1 建立机械手平台模型
回转式抽拉机械手平台主要由回转机构、位移补偿机构和支撑平台组成,在SolidWorks三维软件中建立堆垛机三维模型,假设存取货箱的实际尺寸为长600 mm、宽300 mm、高150 mm,板厚2 mm。载货平台结构如图1所示。
载货平台上的位移补偿由链条带动整体结构进行Y方向的移动;回转机构由两组齿轮组构成,链条附件上安装竖直推拉杆机械手。竖直推拉杆一共有两组,即4个,安装在回转机构链条上,对称分布,便于实现对货箱货耳的拉取。
工作时,堆垛机中的行走机构和提升机构将机械手平台送到指定位置,机械手平台上的机构开始工作,机械手部分通过位移补偿机构将取货机械手靠近货箱一侧,再通过回转机构拉取货箱到机械手平台上,回转机械手平台与货箱之间的接触部分由耐磨材料构成,然后位移补偿机构回到原位,最后通过堆垛机中的提升机构和行走机构将货箱送到出货口。
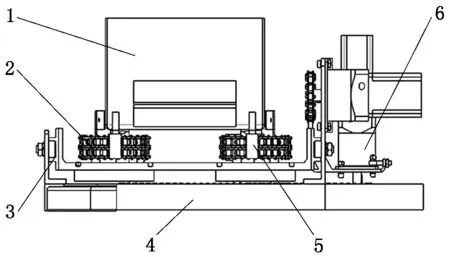
1-货箱;2-回转链条;3-位移补偿机构;4-支撑平台;5-回转机械手;6-电机图1 载货平台结构图
2 载货机械手平台静力学分析
2.1 静力学理论分析
通常把结构在静态载荷下受到的作用力称为静力,研究这类问题时,可以忽略惯性和阻尼对结构的影响。当结构受到静态载荷的作用时,结构处于静力平衡状态,此时必须充分约束[3]。
2.2 载货平台静力学分析
通过SolidWorks三维建模软件建立模型,保存为“step”格式,然后再打开ANSYS Workbench软件,选择静力学分析模块,分别对其进行模型的导入、材料的赋予以及网格的划分。可将金属结构赋予结构钢材料属性,将耐磨材料设定为橡胶属性,采用自动网格划分,共得到21 847个节点、4 951个单元。接着对模型进行边界约束,固定约束载货平台的侧面。设定货箱的载货质量为120 kg,进而对模型在自身重力和货箱给的压力下进行变形量和最大应力分析,得到如图2和图3所示的变形云图和应力云图。图2中最大变形量为0.320 9 mm,变形量在误差允许范围内;图3中最大应力为14.949 MPa, 而材料的许用应力为228 MPa,最大应力小于许用应力,故满足设计要求。

图2 抽拉式机械手平台变形云图
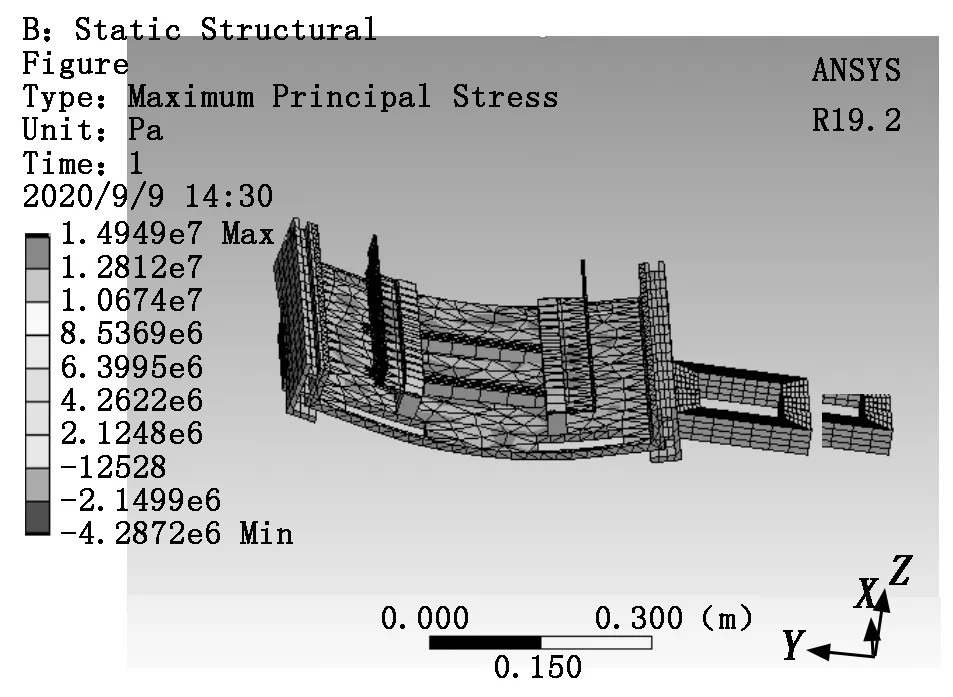
图3 抽拉式机械手平台应力云图
3 机械手平台模态分析
3.1 模态分析理论基础
模态分析是研究结构动力学特性的一种最基本的方法,在工程振动领域中的应用比较广泛,常用于分析机构的自振频率特性。在每一种模态下,结构都有其固定和特有的频率以及模态振型,可以评价现有结构的动态特性,避免结构因设计不合理发生共振现象。从中可以认识到结构对动力载荷的响应[4]。
由经典力学理论可知,物体的动力学通用方程为:
[M]{x″}+[C]{x′}+[K]{x}={F(t)}.
(1)
其中:[M]为质量矩阵;[C]为阻尼矩阵;[K]为刚度矩阵;{x}为位移矢量;{F(t)}为力矢量;{x′}为速度矢量;{x″}为加速度矢量。
无阻尼模态分析是经典的特征值问题,动力学方程如下:
[M]{x″}+[K]{x}=0.
(2)
结构的自由振动为简谐振动,位移为正弦函数,即:
x=Xsin(ωt).
(3)
将式(3)代入式(2)中,得:
([K]-ω2[M]){x}=0.
(4)

3.2 机械手平台的三维建模和模态分析
由于进行模态分析时,结构零件的细微差别对结果几乎没有影响,而在网格划分过程中会存在一定程度的阻碍,因此将载货平台简化,便于后续对结构进行模态分析。
将建立好的机械手平台模型保存为“step”格式,打开ANSYS Workbench软件,选择模态分析模块,设置材料为结构钢,结构钢默认参数不变,设置完材料后,对模型进行网格划分,共得到27 847个节点、4 951个单元。再对其施加载荷和约束,对载货平台底部施加固定约束,设定情况为不施加任何外力作用下载货平台的模态分析,从而得出其空载时的固有频率和振型图。表1和图4分别为机械手平台前6阶模态频率和前6阶固有频率所对应的振型图。

表1 机械手平台的前6阶模态频率

图4 前6阶模态下机械手平台振型图
4 结论
(1) 利用三维建模软件和ANSYS Workbench软件相结合,对载货平台进行了静力学仿真,从分析结果可以得出,在限定的工况条件下,抽拉式机械手平台设计合理,为以后节省了大量的设计时间和实验成本。
(2) 通过ANSYS Workbench软件,对机械手平台进行模态分析,得出了前6阶模态下机械手平台的固有频率以及振型。当堆垛机工作时的频率与机械手平台的频率相同时将会发生共振现象,所以通过分析掌握机械手平台的前6阶频率,将会在很大程度上避免堆垛机发生共振现象。
(3) 通过对堆垛机机械手平台的模态分析,掌握了在前6阶下的模态参数,为结构系统的振动特性分析、振动故障诊断和预报以及结构动力特性的优化设计提供了依据。
