基于欠定盲源分离的同步跳频信号网台分选
2021-03-17李红光张东伟杨银松齐子森
李红光 郭 英 张东伟 杨银松 齐子森 眭 萍
①(空军工程大学信息与导航学院 西安 710077)
②(空军工程大学空管领航学院 西安 710051)
③(空军通信士官学校综合训练系 大连 116100)
1 引言
跳频(Frequency Hopping, FH)同步组网由于组网数目多、网间干扰小和抗侦察能力强等优点,在军事通信中广泛应用。该组网中的电台FH周期、起跳时刻和频率集均相同,传统参数估计方法[1]很难进行有效分选,而且在实际侦察中,受天线体积限制,侦收的混合信号数目一般小于网台个数,因此欠定盲源分离(Under-determined Blind Source Separation, UBSS)技术[2–5]是解决该类问题的有效方法。
目前基于稀疏分量分析[6–9]的“两步法”是解决UBSS问题的常用方法。文献[10]利用源信号时频域的正交性,通过最大后验模型估计二进制掩码,完成源信号盲分离。该方法计算复杂度低,对混合信号稀疏性要求较高,只适用于2维空间。文献[11]利用混合信号稀疏性,采用最大后验概率的 l1范数分离算法实现多维源信号盲分离。该算法的分离效果和 l0范数算法相当,但对源信号稀疏性要求较高。文献[12]改进了文献[11]的目标函数,将稀疏盲源分离问题简化为特定协方差矩阵的次特征向量的迭代计算问题,降低了计算复杂度。文献[13]利用基追踪贪婪算法实现UBSS源信号恢复,算法构造字典较复杂。上述文献算法均是在定频源信号条件下实现UBSS,对于FH信号盲分离效果不佳。文献[14]利用Gabor变换将混合FH信号变换至时频域并进行单源点检测,通过近邻传播聚类方法对时频比矩阵聚类完成混合矩阵估计。该方法提高了单源点检测概率,但没有考虑FH混合矩阵时变性。文献[15]通过对S变换的时频点进行单源点检测建立时频比矩阵,采用时频比矩阵各列方差最小化准则估计混合矩阵。该方法门限阈值取值缺乏理论指导。文献[16]利用归一化的时频点系数检测单源点,通过层次聚类算法完成复数混合矩阵和波达方向(Direction Of Arrival, DOA)估计。该算法在低信噪比条件下,容易将部分噪声点误认为是单源点,导致混合矩阵估计误差较大。针对上述问题,本文提出一种欠定盲源分离的同步FH网台分选算法,该算法首先对FH信号时频变换,结合L型阵列特点建立欠定盲源分离数学模型,并通过自适应阈值算法滤除时频矩阵背景噪声,采用绝对方位差检测算法进行单源点检测,保证单源点的充分稀疏性,然后利用基于戴维森堡丁指数(Davies-Bouldin Index, DBI)的模糊C值聚类算法完成混合矩阵和2维DOA估计,最后采用改进的稀疏自适应匹配追踪算法实现源信号盲分离。
2 FH网台盲分离数学模型
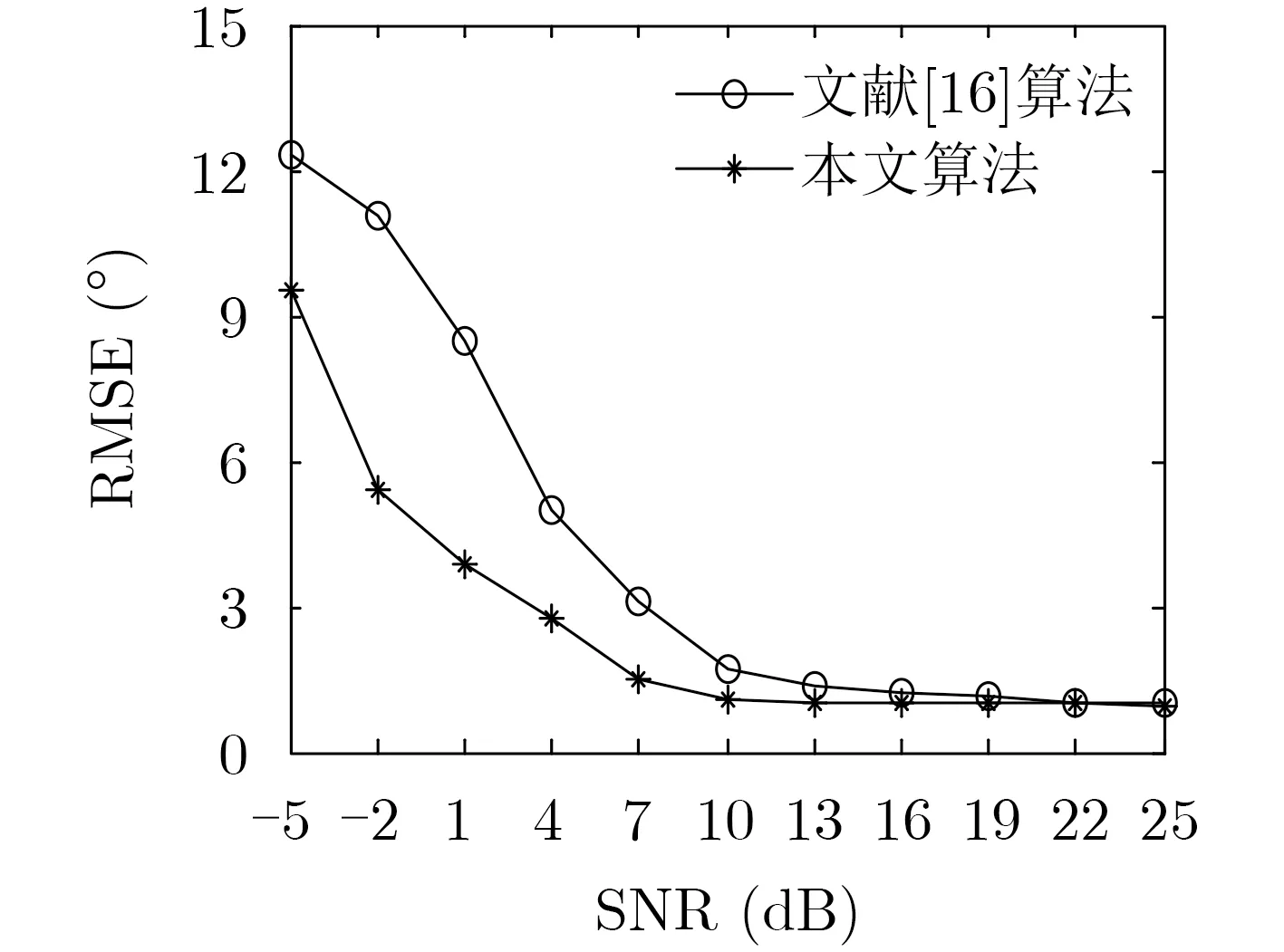
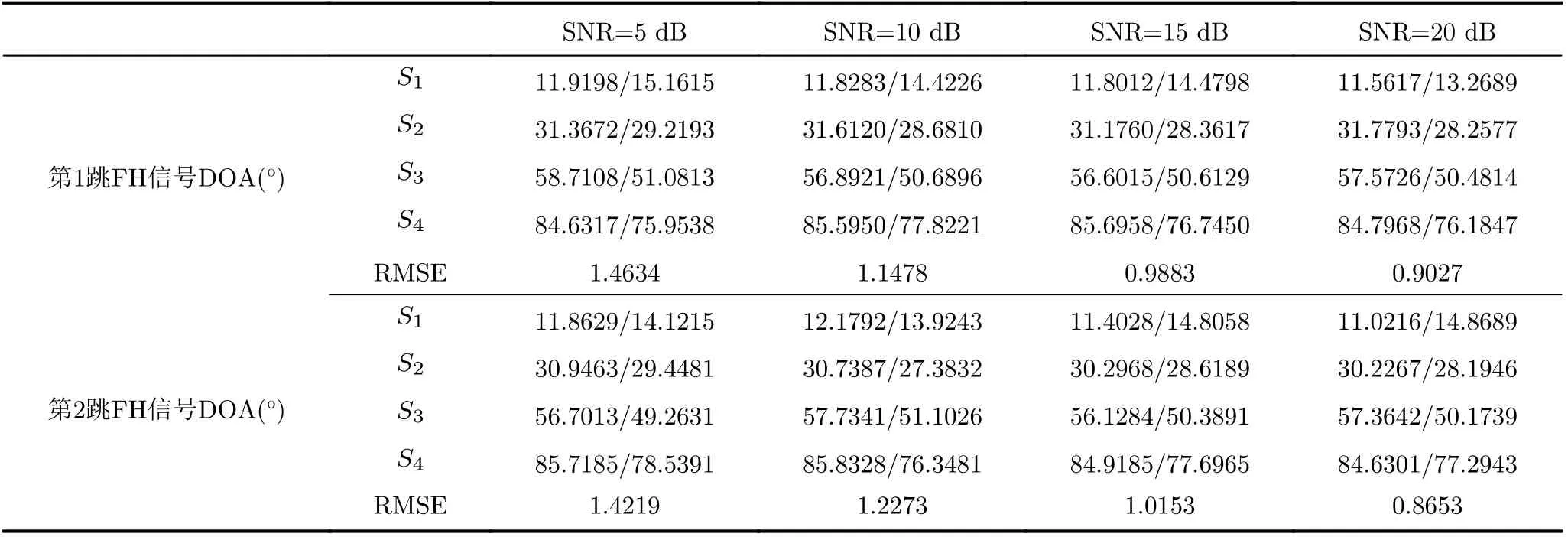
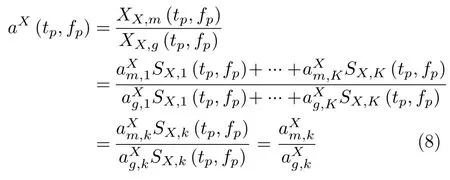
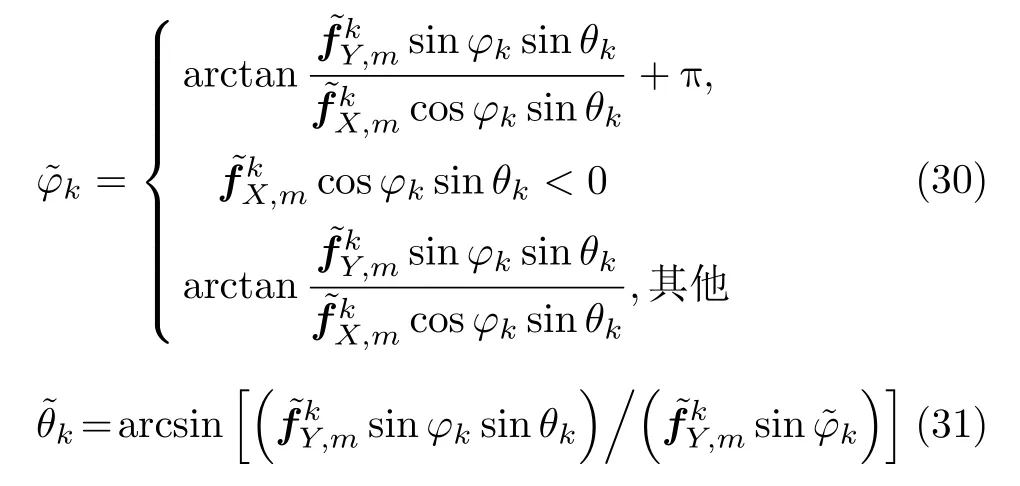
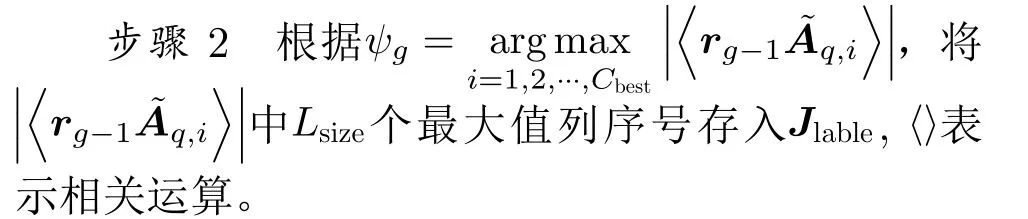
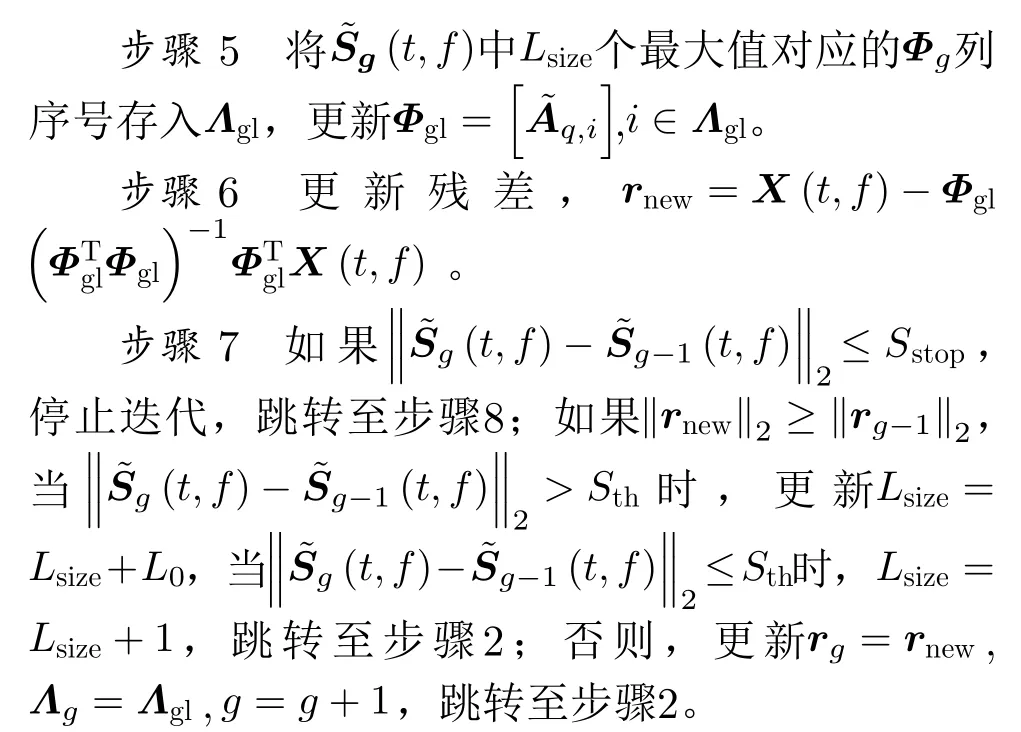
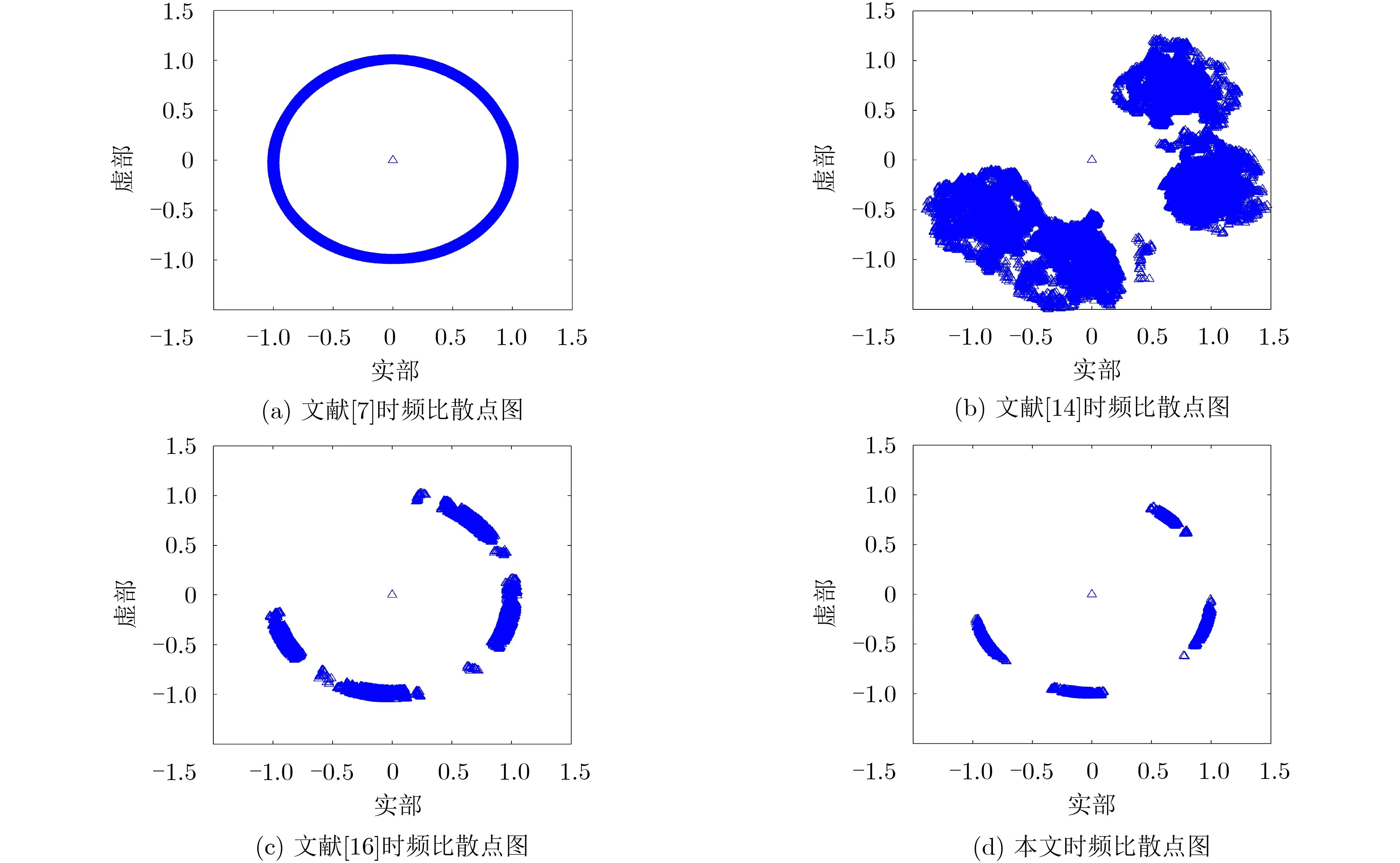
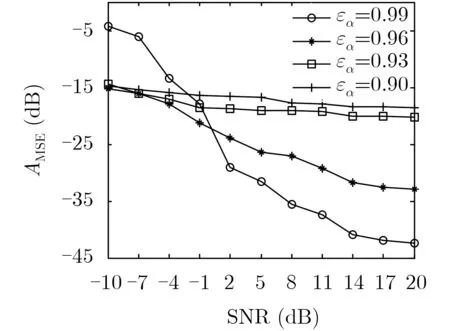
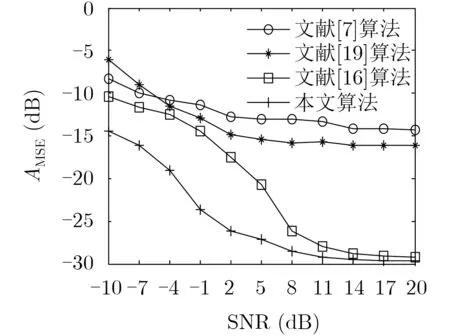
假设L型天线接收K 个远场FH信号s(t)=[s1(t),s2(t),···,sK(t)]T,如 图1所 示,子 阵 X 和 Y互 成90º,每个子阵有 M个阵元,M 将x −y 平 面原点阵元作为参考,则第m 个阵元接收的混合信号可表示为其中,µmk表示第m 个阵元接收的第k 个FH信号幅度衰减,1 ≤m ≤M , 1 ≤k ≤K, τmk表 示第m 个阵元接收的第k 个FH信号传输时延,vm(t)表 示第m 个阵元接收的噪声,fk(t)为 第t 时刻sk(t)的载频。 假设接收阵列中各阵元是各向同性的,则混合信号在子阵 X和 Y的导向矢量分别为 其中,xX(t)=[xX,1(t),xX,2(t),···,xX,M(t)]T, xY(t)=[xY,1(t),xY,2(t),···,xY,M(t)]T, xX,m(t) 表示子阵X 的 第m 个 阵元接收的混合信号。eX(t)=[eX,1(t),eX,2(t),···,eX,M(t)]T, eY(t)=[eY,1(t),eY,2(t),···,eY,M(t)]T, eX,m(t) 表 示子阵 X 的第m 个阵元接收的均值为0,方差为σ2的高斯白噪声。将式(4)和式(5)合并可得 图1 FH信号L型阵列接收示意图 为了保证源信号恢复精度,一般UBSS算法要求混合矩阵不变,考虑到FH载频跳变特性,本文处理一帧数据为单跳周期数据,保证计算期间A(t)固定不变。通过短时傅里叶变换(Short-Time Fourier Transform, STFT)对混合FH信号时频变换,采用文献[17]跳时刻检测算法完成同步FH信号的单跳分割,可得单跳FH信号在时频域的UBSS数学模型,如式(7)所示 其中,X (t,f), S (t,f)和 E (t,f)分别表示接收的FH混合信号、源信号和噪声的时频变换。 假设 sk(t)在第ζ 跳有 L个时频单源点,其集合 由式(9)可知,在无噪声条件下,观测数据时频比矩阵的列向量与混合矩阵AX(t)列向量只差一个复系数,则AX(t)列 向量估计值可表示为 由此可知,通过构造单源点时频比矩阵即可完成子阵 X和Y 混合矩阵估计。 为了避免噪声对混合矩阵估计的影响,采用自适应阈值去噪算法,滤除时频矩阵中噪声和低能量时频点。假设子阵 X接收的混合信号任一时频点XX(th,fh), h ≥1 , 通过式(11)来判断XX(th,fh)是否被剔除 为了选取合适的阈值ε,提高去噪算法的鲁棒性,ε 取值方法如下: 输入:混合信号时频矩阵XX,1。 输出:最佳阈值εbest。 在同步非正交组网中会发生频率碰撞情况,导致同一时频点存在多个源FH信号,为了保证单源点的充分稀疏性,本文采用基于信号绝对方位差的检测算法,对滤波后的时频矩阵进行单源点检测,从而得到单源点时频矩阵X,1。 假设单源点P (tξ,fξ)存在一源信号Sχ(tξ,fξ)=0, 1 ≤χ ≤K,在不考虑噪声条件下,子阵X 接收的观测数据时频矩阵XX(tξ,fξ)可表示为 对式(12)分别取实部和虚部,可得式(13)其中, εα=cos(∆α) , ( tX,fX)∈X,1,X,1为去噪之后的时频矩阵,0 <εα<1。 模糊C均值 (Fuzzy C-Means, FCM) 聚类算法相比K均值算法更加精确合理,而且不易受初始聚类中心影响。传统FCM目标函数如式(15)所示 由式(15)可知,FCM只是单纯地将样本点与聚类中心的欧氏距离作为类别分割标准,导致聚类对噪声和离散点的影响较为敏感,聚类稳定度和准确度降低。本文在式(15)基础上引入惩罚项和模糊加权系数,降低噪声和样本集分布差异对聚类结果的影响。新目标函数如式(16)所示 其中,超参数 ϑj为惩罚项。由式(16)构建拉格朗日辅助目标函数 其中,λj表 示拉格朗日乘子,0 ≤λj≤1。对式(17)的ηi,j求 偏导,并令∂(ηi,j,zi)/∂ηi,j=0,可得=//fj−zi//2ηi,j 其中, ,由式(18)可求得 由式(19)和式(21)可得 式(22)即可更新FCM算法的 ηi,j,通过对ϑj简化,将 N 个ϑj超 参数减少至对1个参数ϑ′的设置。对式(17)zi求偏导,令∂ Jˆ(ηi,j,zi)/∂zi=0,可得 由式(23)可求得zi,如式(24) 将ϑ′=ϑj/λj代 入式(21),可得ϑj的更新式(25) 输入:单源点矩阵X,m各时频点所对应的频率集 F,聚类个数设置C =M ,模糊系数β =2,最大迭代次数gmax, 目标函数收敛阈值为ℓ,初始聚类中心 Z0为 M 个频率点,初始化ϑj=0,迭代次数g =0。 输出:最佳聚类个数Cbest, 聚类中心Zbest,分类集F′=[F1,F2,···,FCbest]。 步骤 1 根据式(22)计算更新ηg。 步骤 2 根据式(25)和式(24)计算更新Zg。 步骤 3 根据式(26)更新分类集合 F′。 步骤 5 根据聚类结果和式(27)计算DBI值I 。 步骤 6 令聚类个数 C =M+1, g =0 , ϑj=0,跳转至步骤1,重新计算DBI值 I ,如果I 满足IC>IC+1且IC+1 经过FCM-DBI聚类之后,根据 F′即可得到所对应的时频单源点集合′X,1,聚类中心Zbest即为各信源的跳频率估计值集合X,1,而且每个跳频率,1均与各单源点集合一一对应。最终根据式(11)可估计出混合矩阵列向量,经过对各阵元的重新组合排列,即可估计出子阵 X的混合矩阵, 同理可得子阵 Y 的混合矩阵。由式(2)和式(3)可得 对式(28)进行变换可得 由式(29)即可估计各FH信源方位角和俯仰角。 输入:第q 跳观测信号的X (t,f)和。 输出:源信号时频矩阵(t,f)和时域数据。 步骤 1 初始化各参量, r0=X(t,f),索引集Λ0=∅, 列标号集Jlable=∅, 支撑集Φ =∅,迭代次数g =1, 步长Lsize=L0, 阈值Sstop和 Sth, Sstop≪Sth。 在分离每跳源信号之后,可根据DOA信息对各跳源信号进行拼接,假设第1跳的第k 个源信号的DOA估计为,1和,1,第2跳的各源信号DOA估计为i,2和,2, i =1,2,···,Cbest,可根据式(32)完成信号拼接 由式(32)可知,第2跳的第 ic个FH源信号与第1跳的第k 个FH源信号来自同一FH电台。 仿真实验中,接收天线阵元数 M =3,FH源信号数 K =4 ,阵元间距d 为最大频率信号波长的1/2,采样率为20 MHz,观测时长为6000采样点,蒙特卡罗实验次数均为1000,4个FH信源码速率均为100 kbps,跳速均为1000 hop/s,调制方式均为BPSK,跳图案和方位设置如表1所示。 单源点数量和有效性决定混合矩阵估计的速度和精度,本文采用STFT方法,窗函数为1023点汉明窗,步进512点。图2是信噪比0 dB时,STFT时频变换去噪前后的时频图,由图2(b)可知,本文自适应阈值去噪算法能够去除时频矩阵背景噪声。 为了验证算法有效性,对比分析了文献[7,14,16]和本文4种算法的单源点检测性能。图3是4种检测算法在信噪比0 dB时,对应混合矩阵列向量a3,n的时频比实部和虚部散点图,本次试验εth=0.935。 由图3(a)和图3(b)可知,文献[7]检测的单源点数量较大,且没有聚类特性,文献[14]检测的单源点具有一定的聚类特性,但具有很多噪声点,主要是由于文献[7]将去噪之后的时频点均看作单源点,导致引入大量的多源点,文献[14]在单源点检测之前并没有进行去噪处理,导致当信噪比较低时,会将一些能量较大的噪声点误判为单源点。由图3(c)和图3(d)可知,本文检测的单源点相比文献[16]的聚类特性更加明显,而且单源点数量更少。主要由于文献[16]是以时频点能量大小作为单源点的判断准则,信噪比变化和信道传输损耗对于该准则阈值的选择具有较大影响,从而导致能量较小的多源点会误判为单源点。本文是以时频点的DOA信息作为判断准则,只要信源方位具有一定的差异性,均能较准确地检测出单源点,而且增加了自适应阈值的去噪预处理,使检测算法具有较强的噪声鲁棒性。 表1 各FH信源跳图案和方位参数 图2 STFT时频变换去噪前后的时频图 为了对比分析混合矩阵的估计性能,本文采用均方误差作为评价标准,如式(33)所示其中, A为实际混合矩阵,为估计混合矩阵,K 为源信号个数,// ·//F表示Frobenius范数。 图4是单源点检测阈值 εα在 信噪比−10 ~20 dB条件下对混合矩阵的估计性能影响,信噪比间隔3 dB, εα取值分别为0.90, 0.93, 0.96和0.99。实验中FCM-DBI聚类个数初始值 C =3,最大迭代次数gmax=100 ,收敛阈值ℓ =0.00001。由图4可知,当检测阈值 εα=0.99时,由于检测的单源点数量过少,低信噪比条件下混合矩阵估计误差较大,当阈值εα≤0.93时,由于引入大量多源点,同样使混合矩阵估计不准。通过分析,检测阈值 εα=0.945较为合理。 图5是文献[7,16,19]和本文4种混合矩阵估计算法在信噪比 − 10 ~20 dB条 件下的AMSE随信噪比变化情况,信噪比间隔3 dB。由图5可知,文献[7]和文献[19]算法的混合矩阵估计精度相对较低,主要是由于文献[7]单源点检测时引入了较多的多源点,导致混合矩阵估计不准,文献[19]利用滤波之后的观测信号比值来估计混合矩阵,滤波器种类和参数选择对估计结果影响较大,算法鲁棒性较差。文献[16]和本文算法的估计精度随着信噪比增加均逐渐提高,当信噪比大于14 dB 时,两种算法的估计精度接近,当信噪比小于5 dB时,本文算法的估计精度高于文献[16]算法,主要是由于本文FCM - DBI算法通过引入DBI指数,不需要预先已知聚类个数,而且对FCM的目标函数增加了惩罚项和模糊加权系数,有效降低了由噪声引起的聚类样本分布不均衡对聚类结果的影响,增强了FCM - DBI聚类的鲁棒性。而文献[16]聚类算法不仅需要已知聚类个数,而且噪声对聚类阈值的选择有较大影响,特别是低信噪比条件下,算法对噪声和异常样本点较为敏感,导致聚类结果不稳定,混合矩阵估计精度下降。 图3 4种检测算法的时频比散点图 εα AMSE图4 不同信噪比下阈值 对 的影响 AMSE图5 不同信噪比下4种算法的 为了对比分析信源时域信号的恢复性能,本文采用信干比作为评价标准,如式(34)所示其中, Sk(t) 为第k 个信源时域信号,k(t)为恢复第k 个时域信号,SSIR越大说明源信号恢复效果越好。 图6是文献[16]子空间投影、SAMP和SASP 3种算法恢复的信号 SSIR随信噪比变化情况,信噪比范围为− 5 ~20 dB,间隔3 dB,3种恢复算法均采用本文所估计的混合矩阵,SASP的初始步长Lsize=4。由图6可知,3种恢复算法的恢复性能均随着信噪比增加而提高,当信噪比大于1 dB时,本文SASP算法的恢复性能优于子空间投影和SAMP算法,主要是由于子空间投影算法需预先已知源信号个数,当假设的源信号数大于真实个数时,算法会引入额外噪声,特别是低信噪比下,恢复误差较大。而本文基于稀疏重构的SASP算法对噪声具有一定的抑制作用,同时引入变步长的稀疏度估计方法,相比需已知稀疏度的SAMP算法具有更高的恢复精度。 根据文献[7,16,19]和本文4种算法估计的混合矩阵,均采用SASP算法恢复信号。图7是恢复信号SSIR随信噪比变化情况,信噪比范围− 5 ~20 dB,间隔3 dB。由图7可知,在相同恢复算法条件下,本文估计的混合矩阵恢复性能优于其他3种算法,而且混合矩阵估计精度越高,源信号恢复误差越小,因此提高混合矩阵估计精度,是改善源信号恢复质量的有效方法之一。 为了对比分析DOA的估计性能,本文采用均方根误差作为评价标准,如式(35)所示 SSIR图6 不同信噪比下3种恢复算法的时域信号 图8是文献[16]和本文估计的DOA均方根误差随信噪比变化情况,信噪比范围− 5 ~20 dB,间隔3 dB。由图8可知,两种算法估计的DOA均方根误差均随信噪比增加逐渐减少,当信噪比大于10 dB时,两种算法的估计误差均在1º左右,但在低信噪比条件下,本文算法估计的DOA误差更小,主要是由于本文的混合矩阵在低信噪比下估计精度更高。 表2是不同信噪比下估计的相邻两跳DOA(方位角/俯仰角)和均方根误差。通过表1和表2可知,当信噪比大于10 dB时,DOA估计误差小于1°。同时相邻两跳的同一信源DOA估计非常接近,通过式(31)可以完成FH信号拼接。 本文通过自适应阈值去噪和方位差单源点检测方法,有效提高了混合矩阵估计精度,并利用SASP算法完成各跳源信号重构恢复,根据同一信源的DOA估计一致原则实现各跳源信号拼接。当SNR大于5 dB时,所提算法恢复的信号干信比达到20 dB, DOA估计精度小于1°,如何进一步降低SASP算法的计算复杂度,是下一步研究方向。 SSIR图7 不同信噪比下4种混合矩阵恢复的时域信号 图8 不同信噪比下两种算法估计的DOA均方根误差 表2 不同信噪比下相邻两跳的DOA和RMSE(°)






3 FH混合矩阵估计


3.1 时频矩阵去噪


3.2 单源点选取

3.3 混合矩阵估计












4 FH源信号恢复



5 实验仿真与分析
5.1 单源点检测
5.2 混合矩阵估计



5.3 源信号恢复

5.4 DOA估计与FH信号拼接


6 结束语