控制棒驱动机构钩爪组件运动可靠性分析方法
2021-03-16付国忠张进强明书君
邓 强,付国忠,李 维,张进强,孙 博,明书君,杨 西,任 羿
(1.中国核动力研究设计院核反应堆系统设计技术重点实验室,四川 成都 610041)(2.北京航空航天大学可靠性与系统工程学院,北京 100191)
控制棒驱动机构(CRDM)是反应堆控制和保护系统的伺服机构,其安全性和可靠性将直接影响反应堆的安全与运行[1]。钩爪组件是控制棒驱动机构中核心的运动部件[2],在控制棒驱动机构的工作过程中,钩爪组件需反复地伸出和收回,协助完成驱动杆的步进运动。由文献[3]对CRDM的失效机理分析可知,钩爪组件的运动失效是CRDM主要的失效模式之一,有必要针对钩爪组件进行运动可靠性分析。
近年来,研究人员针对控制棒驱动机构部、组件的可靠性开展了相关研究。文献[4]运用失效模式及影响分析(FMEA)方法定性分析了驱动机构每个组件的失效模式,得出了各失效模式的风险等级;文献[5]运用热力学仿真的手段对控制棒驱动机构高温下的结构可靠性进行了研究;文献[6]分析了控制棒驱动机构传动件的结构及材料性能,研究了传动件的耐磨可靠性。目前对控制棒驱动机构可靠性的研究主要是对机构失效模式的定性分析与结构可靠性分析,对钩爪组件运动可靠性的研究相对较少。本文提出了一种考虑受载变形影响的钩爪组件运动可靠性分析方法,研究了受载变形对钩爪组件运动可靠性的影响。
1 钩爪组件运动可靠性定义
1.1 钩爪组件结构及运动简图
钩爪组件结构如图1所示,钩爪组件的工作原理为:移动衔铁上表面受到电磁力作用,向上运动带动连杆及钩爪运动,钩爪齿向外伸出与驱动杆啮合。

图1 钩爪组件结构及运动简图
1.2 钩爪组件运动可靠性模型
在钩爪完全伸出后,钩爪齿需要与驱动杆沟槽进行啮合完成提升和下插等动作,因此钩爪齿的伸出量成为影响钩爪能否与驱动杆准确啮合的重要参数。以1号销孔中心作为参考点,钩爪齿距离1号销孔中心的水平距离即为钩爪的伸出量D,如图1所示。根据可靠性定义方法,可根据钩爪伸出量落在允许误差范围内的概率评价钩爪组件的运动可靠性,此概率即钩爪组件的运动可靠度。
钩爪组件的伸出量受到零件受载变形的影响,将不考虑变形影响的钩爪齿伸出量D作为理想伸出量,将考虑变形的钩爪齿伸出量D′作为可靠性分析输入参数。钩爪伸出量作为控制棒驱动机构性能指标之一,可认为在伸出量超差5%时,机构失效,以此确定失效判据。设定钩爪伸出量在(a,b)范围内可靠,其中a为0.95倍的理想伸出量,b为1.05倍的理想伸出量。则可以计算钩爪组件运动可靠度P为:
(1)
式中:Φ(·)为标准正态概率分布函数;μD′,σD′分别为伸长率均值和标准差。
2 钩爪组件运动可靠性分析方法
根据钩爪组件运动可靠性模型,考虑由于载荷、材料参数的不确定性导致的钩爪组件变形量的不确定性,本文提出一种钩爪组件运动可靠性分析方法,其流程如图2所示。

图2 钩爪组件运动可靠性分析方法流程图
1)建立理想状态下的钩爪伸出量计算模型,根据有效杆长理论对理想模型进行模型变换,得到受载变形影响下的钩爪伸出量表达式。
2)根据钩爪啮合状态下钩爪组件的载荷及约束情况,对钩爪组件进行静力学分析,得到零件(钩爪、连杆及销孔销轴)的变形量。
3)考虑载荷、材料参数的不确定性,对钩爪组件受载变形量进行不确定性分析,得到零件变形量的分布特征。
4)将受载变形量的分布特征输入受受载变形影响的钩爪伸出量计算模型,用抽样拟合的方法得到受载变形影响下钩爪伸出量的分布特征。
5)根据理想状态下钩爪伸出量的计算模型,计算钩爪组件运动失效的失效判据,结合受载变形影响下钩爪伸出量的分布特征,输入钩爪组件运动可靠性模型进行可靠性分析。
6)根据可靠性分析结果,得到受载变形量对钩爪组件运动可靠性的影响关系,为钩爪组件的结构设计提供参考。
3 钩爪伸出量计算模型
3.1 理想状态下钩爪伸出量计算模型
不考虑钩爪组件受载变形等因素,根据几何关系可建立理想状态下钩爪伸出量的计算模型:
(2)
D=d-L2cosθ+mcos(θ-ψ)
(3)
式中:θ为钩爪摆角;Lx为衔铁相对于钩爪固定副的竖直方向距离;L1为连杆长度;L2为钩爪长度;d为钩爪回转副到衔铁运动副的水平方向距离;m为钩爪齿头到钩爪连杆连接副的距离;ψ为钩爪齿面与钩爪等效杆之间的夹角。
3.2 考虑变形影响下的钩爪伸出量计算模型
3.2.1变形量的计算
通过钩爪组件受载状态下的受力可知,钩爪组件在运行过程中,3个销孔会发生径向变形,使运动副产生一定的间隙,连杆、钩爪会产生轴向变形,从而影响钩爪组件的伸出量。
因此对受载状态下的钩爪组件进行静力学仿真,分别得到1~3号销孔的径向变形量Δd1,Δd2,Δd3及钩爪、连杆的轴向变形量ΔL1,ΔL2。
3.2.2考虑变形影响的钩爪伸出量计算模型
根据有效杆长理论,在考虑运动副间隙及杆变形的情况下,建立如图3所示的等效模型。参考文献[7]的计算方法,根据钩爪组件的特点,连杆及钩爪等效长度计算过程如下。
(4)
式中:γ为连杆在理想模型中的摆角(连杆与水平方向的夹角);α10,α20分别为衔铁与连杆销轴、连杆与钩爪销轴配合点位置角。

图3 考虑配合间隙的钩爪组件等效模型
(5)
式中:α30为钩爪与缓冲轴销轴配合点位置角。
用有效杆长代替钩爪组件实际杆长,可得到变形影响下的钩爪伸出量计算模型:
(6)
D′=d-[L2+ΔL2+Δd3cos(θ′+α30)]cosθ′+mcos(θ′-ψ)
(7)
式中:θ′为考虑受载变形影响下钩爪的摆角。
4 变形量的不确定性分析方法
钩爪组件零件制造工艺的不稳定性会带来材料属性的不确定性,且钩爪所受载荷存在随机性,从而导致钩爪组件各轴变形量具有不确定性。变形量的不确定会造成钩爪伸出量存在波动,因此为保证钩爪组件的安全可靠,有必要考虑参数的不确定性对钩爪伸出量的影响。这里选择零件的材料密度、杨氏模量、泊松比、钩爪齿受载载荷作为不确定性分析输入变量。
受载变形量的不确定性信息可通过抽样计算、分布拟合的方法获取,具体的步骤如下:
1)设置分析输入变量(如材料参数、载荷参数等)以及输入变量相应的分布形式;
2)设定抽样次数,选择适当的抽样方法对仿真输入数据进行随机抽样,并组合成若干组数据集;
3)对每组数据集进行仿真分析,得出关键变量的仿真参数;
4)对仿真结果进行统计,通过拟合方法判断关键变量的分布类型以及分布特征参数。
将受载变形量的分布特征代入钩爪伸出量计算模型,通过抽样拟合得到考虑受载变形及受载变形不确定性影响下钩爪伸出量的分布特征,再输入钩爪组件运动可靠性模型计算运动可靠度。
5 案例分析
5.1 案例描述
钩爪组件模型结构如图4所示,钩爪组件在运行过程中钩爪、连杆及3个销孔、销轴会产生受载变形,从而影响钩爪的伸出量及其运动可靠性。

1—1号销轴;2—连杆;3—2号销轴;4—缓冲轴;5—钩爪;6—3号销轴;7—移动衔铁
钩爪组件各零件几何参数见表1。

表1 几何参数表
5.2 案例求解
5.2.1钩爪组件零件变形量仿真
利用ANSYS Workbench建立仿真模型进行静力学仿真,从而获得相应的零件变形量。连杆与钩爪的变形量、销孔与销轴受载变形后的变形量见表2。
5.2.2可靠性分析
1)钩爪组件零件变形量的不确定性分析。
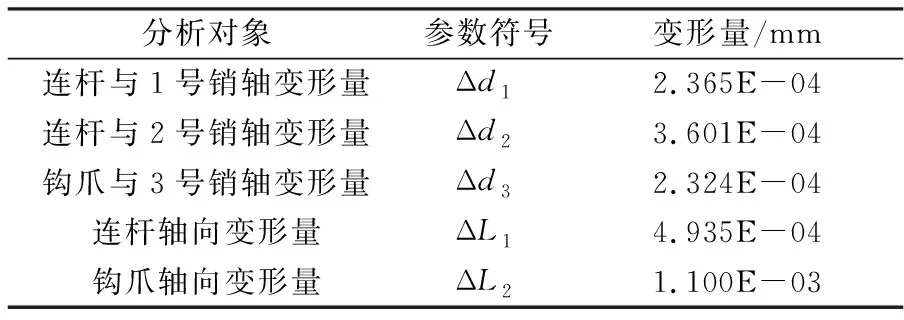
表2 受载状态钩爪组件零件变形量
基于静力学仿真结论,对连杆、钩爪及销孔与销轴受载变形量进行不确定性分析。
由于不同批次的材料成分及热处理的细微差异,可以认为材料的弹性模量、密度和泊松比都有一定的波动范围,假定各参数在其标准值上下1%以内波动,并选择截尾正态分布表征其不确定性。钩爪组件在工作过程中所承载的载荷是变化的,假定其服从正态分布。受载变形量不确定性分析输入参数见表3。

表3 受载变形量不确定性分析输入参数
各零部件变形量的分布见表4,结果显示,钩爪组件零件变形量服从正态分布。

表4 钩爪组件零件变形量不确定性分析结果
2)单次受载变形影响下的钩爪组件运动可靠度计算。
输入连杆与钩爪变形量、销孔与销轴受载变形量的分布特征,采用蒙特卡洛法,利用MATLAB对不确定性参数抽样,对抽出的5 000组伸出量结果进行统计绘图,如图5所示。
拟合得出钩爪伸出量的均值为33.723 7 mm,标准差为2.364 5E-05 mm。
根据钩爪组件理想运动学模型,计算出钩爪啮合状态伸出量为33.723 5 mm,因此可以求得:
a=0.95×33.723 5=32.037 325 (mm)
(8)
b=1.05×33.723 5=35.409 675 (mm)
(9)
将a与b的值代入式(1)可得钩爪伸出量的可靠度为1,表明在单次受载变形的影响下,钩爪组件不发生运动失效,完全满足设计要求。

图5 钩爪伸出量分布图
3)长期受载变形影响下的钩爪组件运动可靠度计算。
钩爪组件长期受载的情况下,由于金属疲劳、变形累积等原因,钩爪组件的变形量会增大,因此将影响钩爪的伸出量和钩爪组件的运动可靠度。
为得到长期受载情况下零件变形量的变化对钩爪组件运动可靠度的影响,逐步增大钩爪零件变形量,计算对应的钩爪组件运动可靠度。结果显示,可靠度在零件变形达到1.6 mm以后开始下降,提取零件变形量在1.6~2.4 mm之间的可靠度数据绘制如图6所示的曲线图(图中dd3和dL2线一致)。

图6 钩爪组件变形量-运动可靠度曲线图
从图中可以看出,当零件变形量增大到1.8 mm以后,钩爪组件可靠度会快速下降。
6 结论
本文以控制棒驱动机构钩爪组件为研究对象,研究了受载变形对钩爪组件运动可靠性的影响,实例验证得到结论如下:
1)考虑受载状态下钩爪、连杆轴向变形及销孔、销轴径向变形的不确定性,计算钩爪组件运动的可靠度。结果表明,单次受载变形对可靠度影响很小,长期受载作用下零件变形量增大,当零件的变形量增大到1.8 mm以后,钩爪组件的运动可靠度会快速下降。
2)在变形量增大的过程中,连杆轴向变形量首先对钩爪组件运动可靠度造成影响,其次对1和2号销轴变形量产生影响。
本文的研究暂未考虑钩爪组件运动副磨损对运动可靠性的影响,在后续的研究中将予以考虑。
