用张量分析方法推导含偶应力弹性力学有限元理论
2021-03-16孙晓勇宋兴海侯娜娜付建航刘立悦
孙晓勇,宋兴海,侯娜娜,付建航,刘立悦
(1.河北省数据中心相变热管理技术创新中心,河北省沧州市重庆路1号 061001;2.河北水利电力学院 土木工程学院,河北省沧州市重庆路1号 061001)
1 经典线弹性理论与考虑偶应力线弹性理论
在经典弹塑性力学理论中,物体内任意一点的应力状态只和应变或应变的历史有关,其基本变量为位移,对位移求梯度得到应变张量,用位移梯度描述无限小的变形,然后再由一点的应变张量分析得到应力张量[1]。含偶应力的线弹性力学理论认为,物体内任意一点的微元体,除有各个方向的位移外,还有本身的旋转变形,而这种旋转变形并非单纯的以旋转角表达,而是用和应变张量一个量级的旋转张量来表示[2]。经典弹性力学理论中微元体也有旋转,其将旋转视作微小的体积单元的刚体转动,即只有旋转位移,没有旋转变形。这样处理将带来其他问题:如果以刚体微小旋转表示单元体旋转,那么相邻的两个微元体将会控制不同的微小旋转,从而无法满足旋转自由度的连续性。对位移求梯度,会得到9个不同的分量,而在经典弹性力学理论中,由位移求梯度得到的应变张量却只有6个独立的分量,剩下的3个分量去哪里了?含偶应力的弹性理论认为,另外的3个分量应由旋转张量提供[3]。含偶应力弹性理论中,基本变量仍然是位移,对位移求梯度,将位移梯度分解为应变张量与旋转张量之和,其中应变张量是对称张量,而旋转张量是反对称张量[4]。旋转张量与旋转矢量一一对应,对旋转矢量求梯度得到曲率张量,用曲率张量表示微元体的旋转变形[5]。很显然,曲率张量比应变张量低一个量级。这就解决了相邻单元旋转自由度不连续的矛盾,因为相邻微元体的旋转矢量是连续的,所以用旋转矢量或旋转张量表示的旋转自由度也是连续的。因此,含偶应力弹性理论是经典弹性理论的一个补充,微元体变形不再只有平动变形,增加了旋转变形,平动变形以应变张量来表示,而旋转变形以曲率张量来表示。含偶应力弹性理论中增加了偶应力与曲率张量的本构关系,引入了旋转模量作为材料的基本参数[6]。因为偶应力相对于应力小一个量级,因此在宏观尺寸下,经典弹性理论不考虑偶应力不会影响到结果的精确性,而在微尺度下,偶应力所占比重增加,不考虑偶应力将带来结果上的很大误差,这也就是为什么微尺度受力构件会有尺寸效应的原因。
2 含偶应力线弹性理论
含偶应力弹性理论有悠久的发展历史。早在1887年,Voigt[7]就提出,将物体分解为很多个体积接近于零但不为零的微小单元,微小单元上作用有体力偶和面力偶,相邻的微小单元接触面上的力偶连续。1909年,Cosserat兄弟[8]提出了Cosserat理论,他们把物体分解成刚体颗粒,每个颗粒可以平移还可以转动。物体的变形就以每个颗粒的平移和转动来表示。在1960年后,Toupin[9],Mindlin和Tiersten[10,11],Koiter[12]等建立了较完善的偶应力理论[13],在Cosserat理论基础上,他们认为,微元体的变形仍由平移和转动组成,但表示转动的矢量是由位移矢量得到的,相互不独立。2002年,Yang[14]在Mindlin基础上,又对偶应力理论进行了改进,从应变能的角度,建立了由应变张量和旋转矢量梯度共同组成的应变能密度表达式。Yang的理论简化了偶应力理论的本构关系,将材料参数定为3个,除传统的杨氏模量和泊松比外,增加了一个内禀特征尺寸参量,用以表示旋转变形本构关系,即后来的旋转模量。
2.1 含偶应力弹性力学理论有限元推导
2.1.1 基于偶应力理论的几何描述
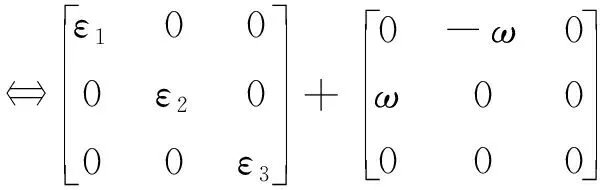
对位移求梯度,可以表示材料内部的无限小变形,得到非对称的二阶张量,可以分解为2部分:
uij=εij+Ωij
其中,应变张量ε和旋转张量Ω与位移的关系分别为
旋转矢量ω与旋转张量Ω一一对应,关系式为
Ωij=-ωij∶εijk
其中,ε是置换张量。写为矩阵形式:
旋转张量Ωij是斜对称张量,其物理意义为微元体体积不变时的旋转变形。引入曲率张量χij表示材料中任一点转动变形的程度:
χij=ωji
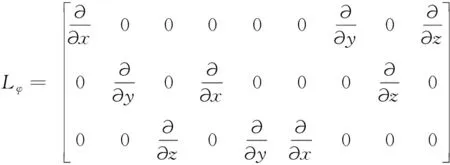
曲率张量由旋转矢量求梯度得到,而旋转矢量又是位移旋度的一半,可以得到曲率张量和位移矢量的关系表达式:
而曲率张量的迹为零,即trχ=0。
根据ε∶Ω=0,可知应变张量εij和旋转张量Ωij相互独立。平动变形和转动变形以图形表示,如图1所示。
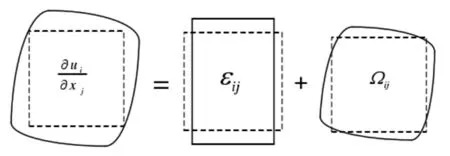
图1 无穷小变形分解为平动变形和转动变形Fig.1 Infinitesimal deformation is decomposed into translational deformation and rotational deformation
2.1.2 基于偶应力理论的Hamilton原理
动量矩定理:
动能定理:
式中:x为微元体位置,υ为速度,U为单位质量机械能。
建立虚功原理方程:
在含偶应力弹性理论中,位移是惟一的独立变量,旋转角根据位移求得。但是在进行有限元分析时,将节点位移视作未知量可能会引起节点旋转角的不连续。为了避免因未知旋转角引起的需要建立C1连续高阶元,增加虚功原理的约束条件,引入罚函数项:
式中:φi是未知的旋转角,α是罚函数因子。
把弹性体离散为六面体单元,每个单元有8个节点,每个节点有6个自由度。将单元内任一点位移写成矩阵列向量形式:
每个节点的位移也写成矩阵列向量形式:
di=[uixuiyuizφixφiyφiz]T(i=1~8)
将单元内任一点位移离散:
其中,矩阵[Ni]=NiI6×6,形函数
应变表示为矩阵的形式:
其中
ε=[εxxεyyεzzεxyεyzεxz]
χ=[χxxχyyχzzχxyχyzχxzχyxχzyχzx]
因此,应变矩阵由节点位移矩阵表示为

其中
B=LN=[B1B2…B8]

其中
Bα=[Bα1Bα2Bα3Bα4Bα5Bα6Bα7Bα8]3×48
且
2.1.3 基于偶应力理论的本构关系
含偶应力理论中应力表示为
其中
σ=[mxxmyymzzmxymyzmxzmyxmzymzx]
同样,应变表示为
其中
ε=[εxxεyyεzzεxyεyzεxz]
χ=[χxxχyyχzzχxyχyzχxzχyxχzyχzx]
由本构关系σij=2μεij+λθI和mij=4ηχij得:
其中
Dφ=4ηI9×9
2.1.4 基于偶应力理论的有限元求解格式
其中
对坐标进行等参变换:
其中
将Ni对局部坐标求导得:
其中,雅阁比矩阵J可改写为


2.1.5 平面问题有限元求解格式
对于平面问题,将六面体单元简化为四边形单元,每个单元的4个节点上均存在3个自由度。
其中形函数矩阵:
[Ni]=NiI3×3
而
平面问题应变矩阵:
应变由节点位移表示:
其中
B=LN=LNd=[B1B2B3B4]
Bi=LNi
根据
所以有
即
Bα=[Bα1Bα2Bα3Bα4]
其中
平面问题应力列矩阵为
平面问题应力与应变矩阵关系为
其中
Dφ=4ηI2×2
平面问题的体力表示为
面力表示为
于是,单元有限元控制方程可写为
经等参变换,其中质量矩阵、刚度矩阵、罚函数矩阵和外力矩阵分别可表示为
3 结束语
含偶应力弹性理论是经典弹性理论的进一步发展。文中从几何描述、能量原理、本构方程等方面阐述了考虑偶应力对弹性力学理论产生的影响;按照以位移为基本变量,旋转变形由位移导出,总应变分解为对称和反对称部分,对称部分代表经典弹性理论中的应变,即平动变形,反对称部分代表旋转变形,对虚功原理方程增加了罚函数因子,从而引入约束条件,避免了需要构造C1连续单元求解未知旋转角带来的高阶元求解的困难。运用等参元离散有限元方程,对三维及二维问题的有限元求解过程进行了详细推导,其结果可用于计算平板上偶应力分布及旋转变形分布等问题,对三维及二维问题中结构变形、裂纹的产生以及材料的破坏等均可进行力学评价。