基于自适应分数阶Kalman滤波的船舶视觉跟踪
2021-03-10方琼林郭志富
方琼林, 郭志富
(1.集美大学 航海学院, 福建 厦门 361021; 2.东海航海保障中心 厦门航标处, 福建 厦门 361000)
视频目标检测跟踪是计算机视觉领域中的一项研究内容,是智能视频监控、智能交通、机器人导航和精确制导等领域的关键应用技术。近年来,视频跟踪在交通视频监控、水面船舶监控等方面得到了广泛应用。视觉跟踪的研究方法有很多,如Kalman滤波、粒子滤波和CamShift等。目前,Kalman滤波器已广泛应用于控制和自动化领域中,如自适应控制和系统识别。[1-7]
在自适应分数阶Kalman滤波方面:杨超等[8]设计自适应分数阶扩展Kalman滤波算法,实现对有色噪声情况下连续时间非线性分数阶系统的状态和参数的估计;ZHU等[9]研究基于分数阶自适应扩展Kalman滤波器的锂离子电池荷电状态估计问题,结合分数阶模型和自适应策略的优点,开发自适应分数阶扩展Kalman滤波算法。
在船舶视觉跟踪方法研究方面:朱常凯[10]研究一种多特征融合的CamShift算法,利用颜色、纹理和边缘等3个特征代替单一的颜色特征描述目标,利用各特征的贡献度分配权重系数,可准确描述船舶,并与改进的目标检测融合算法相结合,实现对船舶的自动跟踪;李晓飞等[11]设计基于双目视觉的船舶跟踪与定位系统,算法分为摄像机标定、目标跟踪、立体匹配和视差定位等4个模块(其中:跟踪模块以目标窗口的形式给出跟踪结果;匹配模块在跟踪结果中进行左、右目立体匹配;定位模块根据左、右目匹配点对的像素位置计算其在物理空间内的坐标);史蓓蕾等[12]结合稀疏表示,提出通过不同角度的复杂采样建立海上常见目标的基函数字典,并提出一种对字典和测试样本进行块稀疏向量生成的方法,在块之间相关性足够小的情况下,采用块正交匹配追踪算法。
在基于Kalman滤波理论的船舶视觉跟踪方法研究方面:黄椰等[13]提出一种基于双目立体视觉的船舶轨迹跟踪方法,建立船舶运动模型,利用强跟踪卡尔曼滤波(Strong Tracking Kalman Filter,STKF)船舶轨迹跟踪的方法跟踪船舶轨迹并估算目标船舶的运动状态;杨高星[14]在目标区域提取出来的前提下,考虑到船舶因遮挡易丢失,采用Kalman算法实现目标估计,进而持续跟踪以防止船舶丢失。
目前,在基于分数阶Kalman滤波理论的跟踪研究方面已取得不少成果,但仍存在一些挑战,如光照变化、物体遮挡和外观变形等。[15-16]本文提出一种用于进行船舶视觉跟踪的自适应分数Kalman滤波器,设计一种状态噪声协方差选择的自适应机制,证明其数学过程。试验选取不同河流的CCTV(Closed Circnit Television)船舶监控视频,包括不同情况下的内河船舶运动监控。同时,针对不同船舶大小、复杂光照、不同明暗度、多船会遇和多船追越等情况进行船舶视觉跟踪验证新算法的准确性和鲁棒性。此外,对不同分数阶下不同滤波器的跟踪误差和准确度进行分析,验证分数阶Kalman滤波器具有更宽的参数选择范围和更高的跟踪精度。
现有自适应分数阶Kalman滤波方法难以使收敛速度和收敛精度同时得到保证。本文所述状态噪声协方差自适应机制和传统自适应Kalman滤波理论的噪声方差自适应机制都与状态噪声协方差相关联,但计算公式更简易。本文设计的分数阶Kalman滤波自适应机制创新地设计一种状态噪声协方差选择的自适应机制:在达到稳定状态之前,选择较大的状态噪声协方差加快收敛速度;在达到稳定状态后,选择较小的状态噪声协方差提高收敛精度。
1 自适应分数阶Kalman滤波算法
分数阶差分定义[16]为
(1)

(2)
式(1)和式(2)中:α为分数阶;h为采样间隔;k为采样的序号;γj为系数。
设系统的分数阶模型[16]为
Δαxk+1=Akxk+wk
(3)

(4)
zk=Gkxk+εk
(5)
式(3)~式(5)中:xk为第k时刻状态变量,表示公路车速;zk为第k时刻的观测输出;wk为第k时刻系统的状态噪声;εk为第k时刻的观测噪声;Gk为第k时刻系统的输出矩阵。


(6)



(7)
Qk为系统状态噪声wk-1的协方差,有

(8)
Rk为第k时刻观测噪声的协方差,有

(9)


(10)

(11)
当状态噪声协方差较小时,收敛速度较慢,收敛精度较高。若状态运动在短时间内变化过快,则收敛速度慢很容易导致跟踪失败;当状态噪声协方差较大时,收敛速度快,精度低。因此,在达到稳定状态之前,选择较大的状态噪声协方差可加快收敛速度;在达到稳定状态后,选择较小的状态噪声协方差可提高收敛精度。设计选择状态噪声协方差的自适应机制,有
(12)
式(12)中:λ>0为增益系数。
Kalman的增益Kk为

(13)
自适应分数阶Kalman滤波算法的流程为

(14)
(15)

(16)
(17)
(18)
假设1:系统状态噪声wk的期望值为零,且与观测输出zk相对独立,有
Ewk=0
(19)

(20)

Eεk=0
(21)
E[εkxk]=E[εk]E[xk]
(22)
(23)
定理1:对于由式(3)~式(5)描述的含系统状态噪声和观测噪声的离散系统,式(12)选择状态噪声协方差的自适应机制,自适应分数阶Kalman滤波算法按式(14)~式(18)计算。
证明:将式(3)代入式(4)可得

(24)
将式(24)代入式(6)可得
根据期望的定义可得
根据假设1,将式(20)代入式(26)可得

(27)
将式(19)代入式(27)可得

(28)
将式(28)代入式(25)可得
(29)
将式(10)代入式(27)可得
(30)
将式(10)代入式(28)可得
(31)
由此可知式(14)成立。
将式(24)代入式(7)可得
(32)
将式(14)代入式(32)可得
(33)
将式(11)代入式(33)可得
(34)
将式(12)代入式(34)可得
(35)
由此可知式(18)成立。
代价函数定义为
(36)
根据极小值的定义,式(36)对xk+1求导的结果为零,可得
(37)
由式(37)可得
(38)
将式(13)代入式(38)可得

(39)
由此可知式(16)成立。
将式(39)代入式(11)可得
(40)
将式(5)代入式(40)可得
将式(7)代入式(41)可得
将式(9)代入式(42)可得
根据假设2,将式(21)代入式(22)可得
E[εkxk]=0
(44)
将式(21)代入式(23)可得

(45)
将式(44)和式(45)代入式(43)可得
(46)
由此可知得式(17)成立。
将式(5)代入式(9)可得
(47)
将式(7)代入式(47)可得
(48)
将式(5)代入式(48)可得
(49)
将式(44)和式(45)代入式(49)可得
(50)
由此可知式(15)成立。
算法流程见图1。
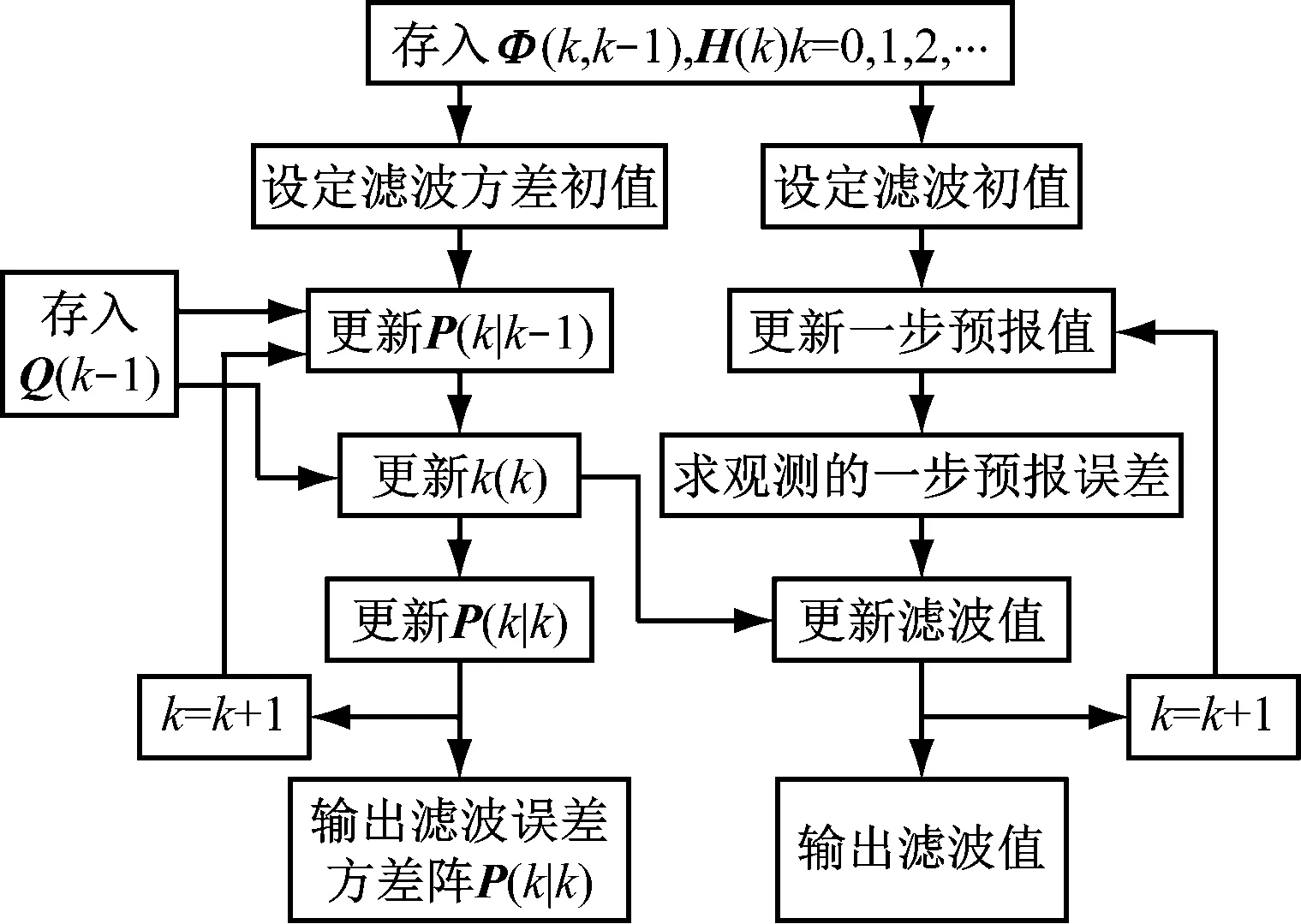
图1 算法流程图
该算法的创新性体现在:
1)设计一种状态噪声协方差选择的自适应机制,在达到稳定状态之前,选择较大的状态噪声协方差可加快收敛速度;在达到稳定状态之后,选择较小的状态噪声协方差可提高收敛精度。
2)将该算法应用到船舶视频跟踪领域,针对不同船舶大小、复杂光照、不同明暗度、多船会遇和多船追越等多种情况进行船舶视觉跟踪,显示出了较强的准确性和鲁棒性。
2 基于自适应分数阶Kalman滤波的船舶视觉跟踪
2.1 算法流程
设Xk为视频第k帧图像中船舶在x轴上的坐标;Yk为视频第k帧图像中船舶在y轴上的坐标;vxk为视频第k帧图像中船舶在x轴方向上的速度;vyk为视频第k帧图像中船舶在y轴方向上的速度;T为采样周期;Wk为视频第k帧图像中的系统状态噪声;V(k)为视频第k帧图像中的观测噪声。系统的状态方程和观测方程分别表示为

(51)

(52)
基于自适应分数阶Kalman滤波的船舶视觉跟踪的步骤如下:
1)初始化系统参数,令k。
2)计算船舶目标的位置和误差协方差。
3)用Kalman滤波预测目标船在k+1帧时刻的状态。
4)在k+1帧时刻观测目标船并计算位置和误差协方差。
5)确定目标船的跟踪区域。
6)更新状态矩阵。
7)判断终止条件,不满足则转步骤2)。
2.2 性能评价指标
采用中心位置误差作为跟踪算法准确性的评价指标。设N为船舶视频图像序列的总帧数,(xk,yk)为视频第k帧图像跟踪结果对应的船舶中心位置。取船舶的跟踪结果为包含船舶的矩形,中心位置为该矩形的几何中心。中心位置误差计算式为
(53)
3 实例与分析
3.1 实例介绍
为验证基于自适应分数阶Kalman滤波的船舶视觉跟踪算法的有效性,试验选取文献[17]中的浙江温州、广东佛山、湖北武汉和安徽芜湖等地的CCTV船舶监控视频。视频包括不同船舶大小、复杂光照、不同明暗度、多船会遇和多船追越等情况下的内河船舶运动监控。
3.2 试验结果
3.2.1不同大小船舶情况下的视觉跟踪结果
小船、中船和大船的视觉跟踪结果见图2。图2中:方框为所跟踪船舶的位置;虚线为船舶中心点随着船舶的运动轨迹。由图2可知:基于自适应分数Kalman算法对不同大小船舶的视觉跟踪都具备有效性。

a)小船 b)中船

c)大船
3.2.2不同光照情况下的船舶视觉跟踪结果
复杂光照和均匀光照情况下的船舶视觉跟踪结果见图3,其中:方框为所跟踪船舶的位置;虚线为船舶中心点随着船舶的运动轨迹。由图3可知:基于自适应分数Kalman算法对不同光照情况下的船舶视觉跟踪都具有有效性。

a)复杂光照 b)均匀光照
3.2.3不同明暗度情况下的船舶视觉跟踪结果
夜景和日照情况下的船舶视觉跟踪结果见图4,其中:方框为所跟踪船舶的位置;虚线为船舶中心点随着船舶的运动轨迹。由图4可知:基于自适应分数Kalman算法对不同明暗度情况下的船舶视觉跟踪都具备有效性。

a)夜景 b)日照
3.2.4多船会遇、追越情况下的船舶视觉跟踪结果
两船会遇、两船追越和多船交汇情况下的船舶视觉跟踪结果见图5。图5中:方框为所跟踪船舶的位置;虚线为船舶中心点随着船舶的运动轨迹。由图5可知:基于自适应分数Kalman算法对多船会遇、两船追越和多船交汇情况下的船舶视觉跟踪都具备有效性。

a)两船会遇 b)两船追越

c)多船交汇
3.3 不同算法性能比较
自适应分数Kalman滤波、分数Kalman滤波器和Kalman滤波器的中心位置误差见表1。将自适应分数阶Kalman滤波器中的状态噪声协方差设为常数,即得到分数阶Kalman滤波器;将分数阶Kalman滤波器中的分数阶设为整数,即得到Kalman滤波器。

表1 不同算法的中心位置误差 %
由表1可知:自适应分数Kalman滤波相比分数Kalman滤波和Kalman滤波具有更小的中心位置误差,跟踪估计的目标中心位置更接近真实目标的位置;Kalman滤波和分数Kalman滤波跟踪目标估计位置的中心坐标与真实运动目标位置的中心坐标误差大。与整数阶滤波器相比,分数阶Kalman滤波器具有更宽的参数选择范围和更高的跟踪精度。因此,基于自适应分数阶Kalman滤波器的跟踪估计的准确性HO另外2种滤波器更高,具有鲁棒性。
3.4 分数阶影响分析
采用不同分数阶时小船视频的自适应分数Kalman跟踪误差见表2,其他参数不变。由表2可知:跟踪误差随Kalman滤波器分数阶的不同而变化。对于特定的船舶视频,存在一个最合适的分数阶,以减小其跟踪误差。与整数阶滤波器相比,分数阶Kalman滤波器具有更宽的参数选择范围和更高的跟踪精度。

表2 采用不同分数阶时小船视频的自适应分数 Kalman跟踪误差 %
4 结束语
当前我国部分渔船的船舶自动识别系统(Automatic Identification System,AIS)设备和船舶识别码使用不规范,存在“船码不符、一船多码、一码多船”等现象,给渔船安全航行和遇险搜救带来了巨大的风险和困难,已成为威胁渔民生命、财产安全的隐患。为提高未安装AIS的渔船、挖泥船等船舶的航行安全性和航道安全性,本文对浮标上监控视频的船舶轨迹进行标定,将其轨迹在海图上标绘出来。本文主要研究的内容如下:
1)提出一种用于船舶视觉跟踪的自适应分数Kalman滤波器,设计一种状态噪声协方差选择的自适应机制,推导其数学过程。
2)试验选取不同河流的CCTV船舶监控视频,利用本文所述算法,针对不同船舶大小、复杂光照、不同明暗度、多船会遇和多船追越等多种情况进行船舶视觉跟踪,都具有较强的准确性和鲁棒性。
3)对分数阶对跟踪误差和准确度的影响进行分析,结果表明:与整数阶滤波器相比,分数阶Kalman滤波器具有更宽的参数选择范围和更高的跟踪精度。
