前视成像声呐最大熵超分辨算法及验证
2021-03-10杨会超夏伟杰翁文明
杨会超,夏伟杰,翁文明
(南京航空航天大学电子信息工程学院,江苏南京211106)
0 引 言
成像声呐通过采用数字多波束形成技术,借助于大数量的换能器阵列,能够实时提供水下前方目标的距离-方位二维图像,是进行水下探测、避障等应用的重要探测设备之一。成像声呐的距离向分辨率由信号带宽决定,方位向分辨率由工作频率和阵列物理孔径决定。距离向分辨率的提高,可以比较容易地通过增加信号的带宽来实现,但是方位向分辨率的提高,相对比较困难。如采用更高的信号工作频率,会导致信号衰减增大,降低了系统的作用距离;如增加物理孔径,则会相应地增加信号通道数量,增加系统的体积、功耗和成本。因此,通过信号处理的方法来提高成像声呐的方位向分辨率,是目前国内外研究人员的关注点之一。
近年来,围绕着这一研究点,国内外取得一些进展。Lee等[1]使用压缩感知方法,引入l1范数进行约束取得了一定的超分辨性能,但是l1范数的引入会带来更大的计算量。Feng等[2]将多进多出(Multiple-Input Multiple-Output, MIMO)技术与单脉冲成像相结合减小了角度估计的误差,但是需要大型的天线阵列,不利于前视探测的应用。Sun等[3]提出了非均匀阵列的DOA估计方法,但是只给出了该方法多目标超分辨的可能性,并未给出具体的验证。
从成像声呐的成像机理角度上来看,声呐图像方位向上的图像可以认为是场景中同一距离内散射点的声散射强度和波束方向图卷积的结果,因此可以考虑通过解卷积来提高方位向分辨率。此类方法的关键是如何正则化解卷积的“病态性”问题。针对该问题,Zhang等[4]在贝叶斯框架下利用分裂伯格曼(Bregman)算法解卷积实现超分辨,但是该算法对信噪比的要求较高。管金称等[5]利用统计优化模型来正则化解卷积的“病态性”问题,但是受限于噪声的分布情况。Richards[6]给出了限制迭代解卷积(Constrained Iterative Deconvolution, CID)和其快速算法(Fast CID, FCID),但是会引入过多的噪声,而且迭代次数的选择会对最终的结果造成很大的影响。Yang[7]和Huang等[8]将Richardson-Lucy算法引入到均匀线阵的波束形成,通过优化波束宽度来达到更高的分辨率,但是对于非均匀阵列并未做相关研究。
针对上述问题,本文提出了用最大熵正则化方法来解决解卷积的“病态性”。与传统方法相比,该方法不需要对先验信息作出假设,不拘泥于原始场景中的目标分布,以 Frieden熵来衡量最终解的特性,可以在噪声抑制和缺失信息恢复之间取得较好的平衡,获得比传统解卷积方法更好的效果。同时,本文引入图像熵来评价最终的成像效果,用客观的评价数据进一步说明该算法的超分辨性能。
1 方位向卷积模型建立
为了避免线阵在偏离法向时引起波束宽度增加,该声呐以半圆形换能器阵列为基础,通过对180个通道回波信号进行处理,在正前方90°内形成540个波束,采用多波束电子扫描的方式实现对探测场景的实时成像。在0°~180°内分布180个相同的换能器阵元,各个阵元之间的间隔为Δθ=π / (K-1 ),K=1 80。通过使用固定的6组加权系数,可以利用1~91号阵元形成1~6号波束,2~92号阵元形成7~12号波束,通过旋转90次可以在正前方90°内形成540个波束[9],具体过程如图1所示。
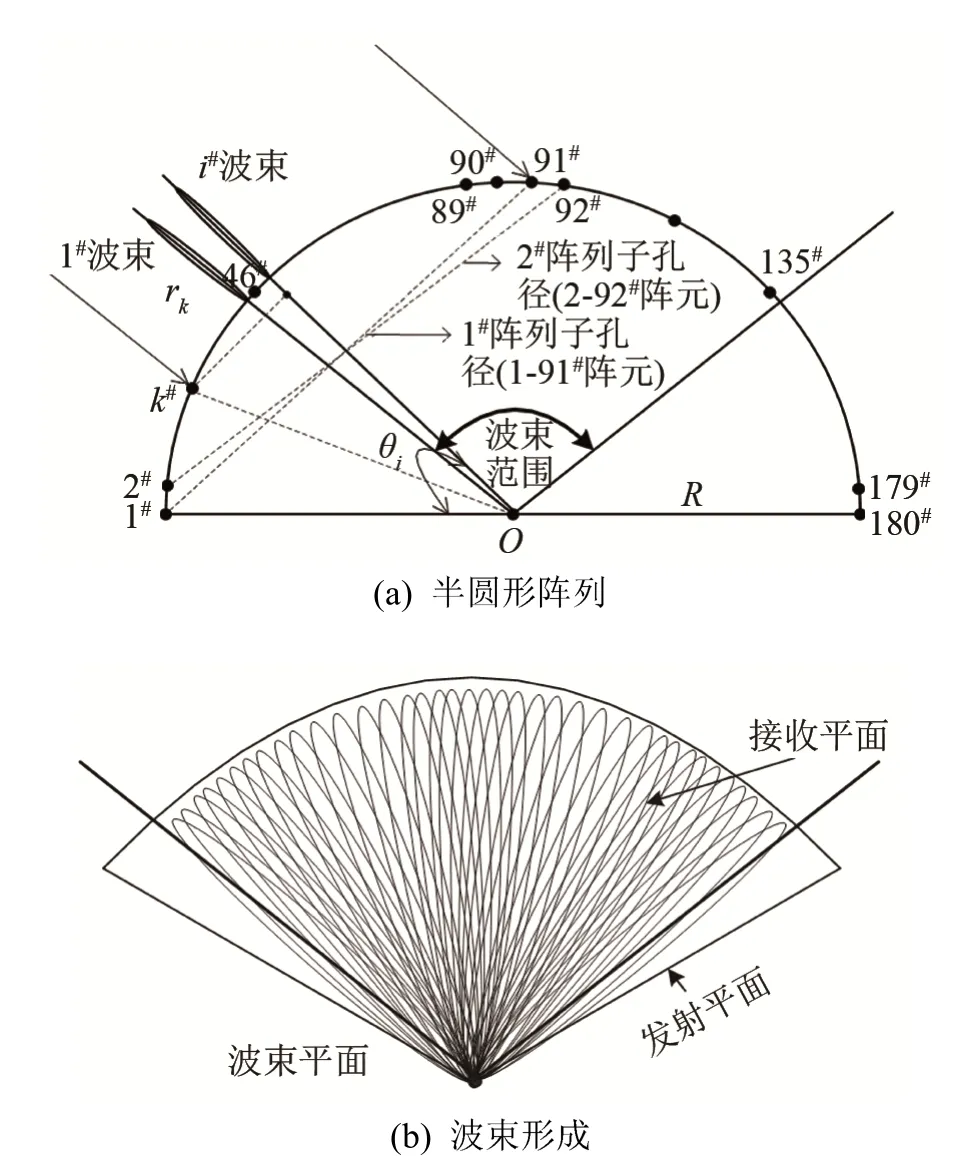
图1 半圆形阵列的波束形成示意图Fig.1 Schematic diagram of beamforming for semi-circular array
成像声呐经过数字波束形成后的接收数据可以看作是目标的散射信息和卷积核的卷积结果,其中卷积核包括方位向上的波束方向图和距离向上的脉冲调制函数,由于声呐的距离分辨率目前可以达到cm级别,所以本文只考虑方位向分辨率的提高,即在固定目标距离时,声呐接收到的方位向上的信息可以看作是目标的散射信息x和波束方向图h[9]卷积的结果。因为接收到的数据是离散的,可以用离散时间系统来表示,即x(n),n= 0,1,2,… ,N-1和h(n),n= 0,1,2,… ,M-1,其中N表示散射场景的采样点数,M表示波束主瓣的采样点数。卷积的结果可以表示为

此时式(2)可表达为

式中:H∈RL×L表示L×L维的卷积核矩阵;y,x分别表示L×1维的声呐接收信号和L×1维的目标散射信息。同时方便后续的说明,本文将式(2)称为“波束扫描”,将式(4)称为“矩阵相乘”。
为了验证这种近似的合理性,下面对仿真场景的不同的接收方式成像的结果进行比较。图2(a)是波束指向为45°的方向图的仿真,可以看出3 dB波束宽度近似为1.2°;图2(b)是由13个点目标组成的原始目标场景的仿真,每个点目标的散射强度设置为灰度值 100,声呐的工作参数设置如下:工作频率 450 kHz,相控扫描范围 45°~135°,声速为1 500 m·s-1,换能器阵列半径为0.12 m。
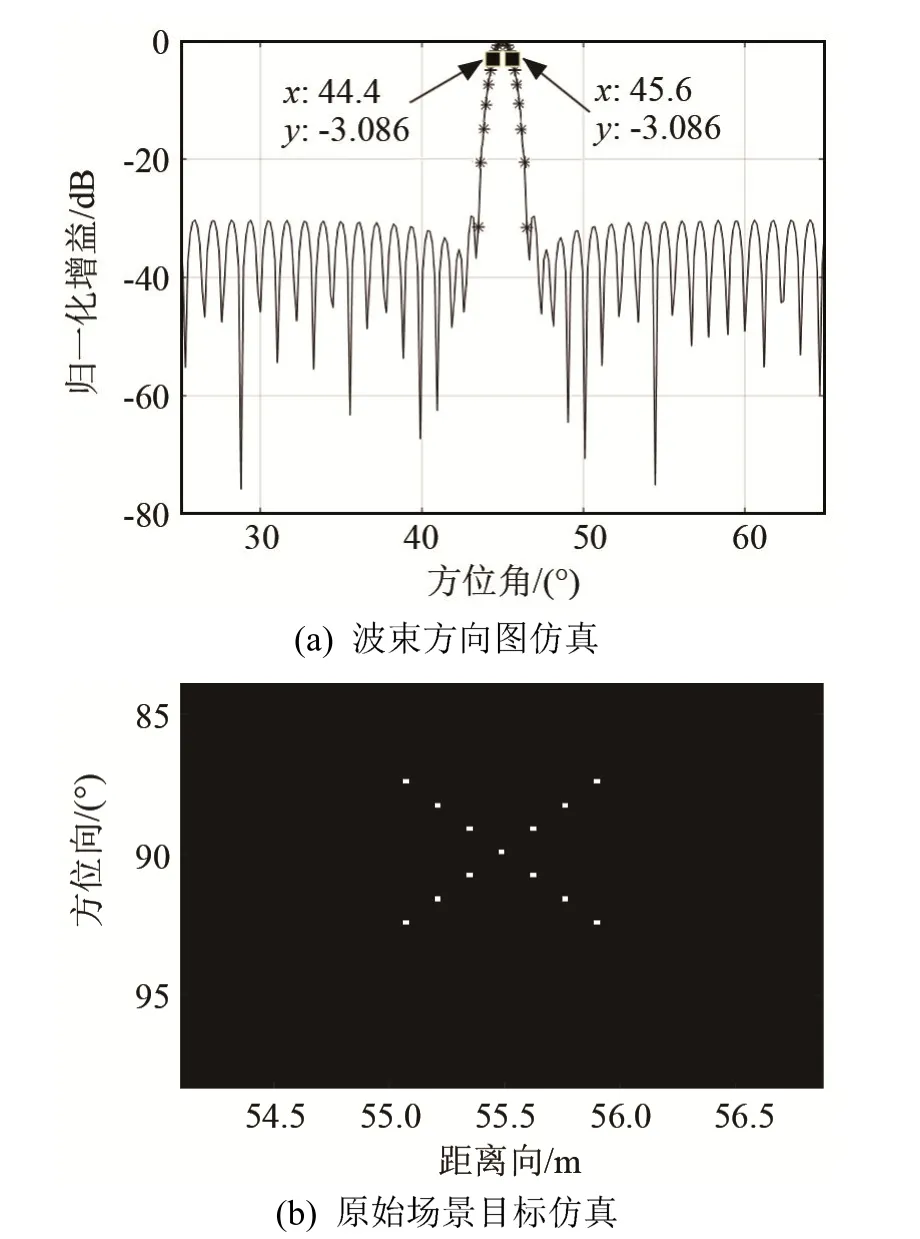
图2 波束方向图及原始场景仿真Fig.2 Simulation of directional pattern and original target scene
原始场景经过波束扫描和矩阵相乘两种接收方式后,可得到图3中的结果,其中L=540,M=17,N=524。
从图3中可以看出,两种不同接收方式的成像结果几乎一样,说明了卷积核矩阵近似的合理性。

图3 两种接收方式成像结果对比Fig.3 Comparison of imaging results of two receiving modes
图4是两种方式在接收单目标和双目标时方位向的剖面图对比。可以看出,在接收单目标时两者基本重合。在双目标接收时,两者也只有略微差异,这进一步说明了矩阵相乘处理和实际接收情况基本一致,为后续的算法推导奠定了基础。
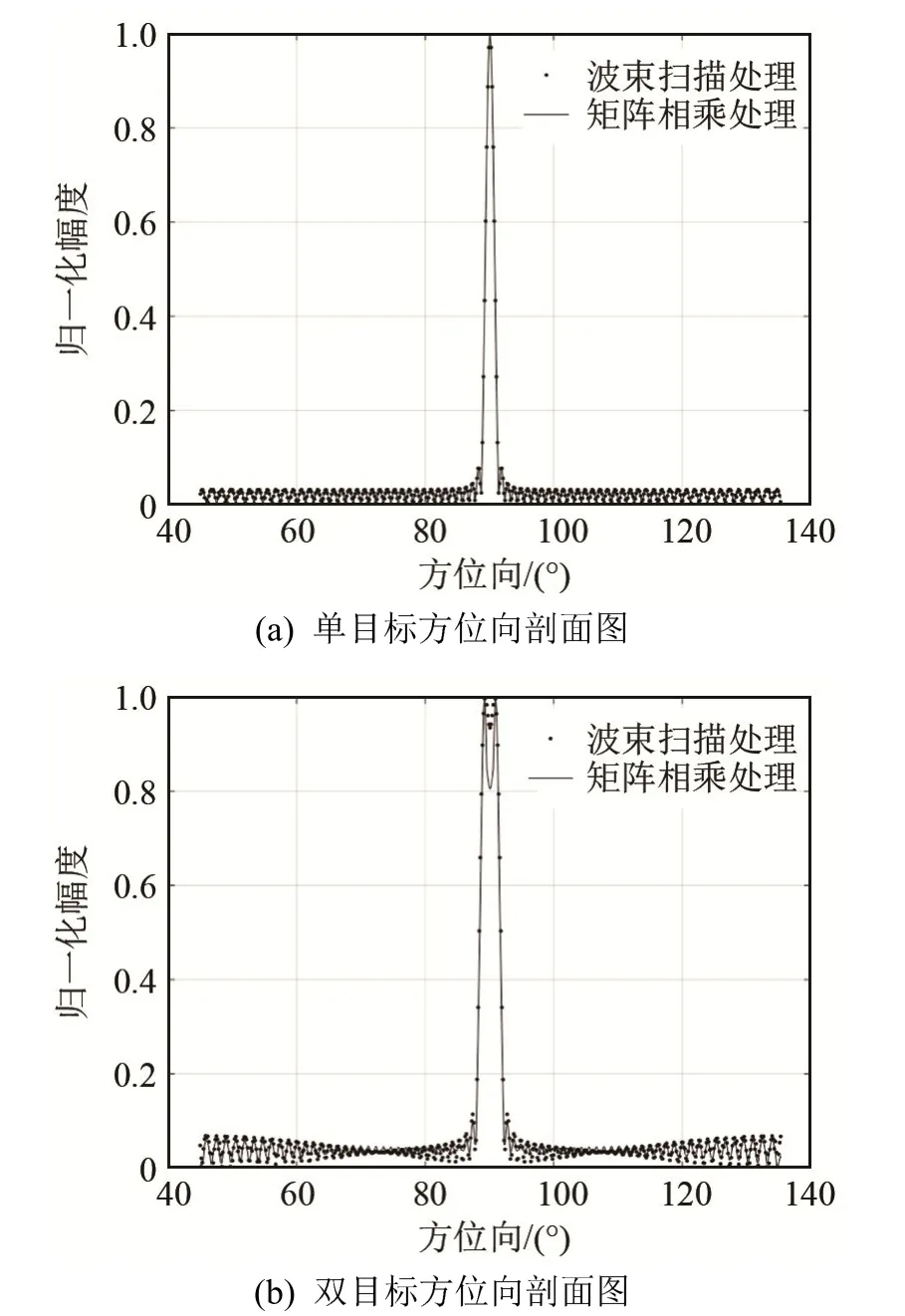
图4 两种接收方式点目标方位向剖面图Fig.4 Azimuth profiles of point targets of two receiving modes
2 最大熵算法推导
由式(1)可知,通过解卷积的方法可以求出关于原始目标散射信息。然而解卷积的过程是一个逆问题,存在着“病态性”,无法直接求解,但是可以通过引入正则化的方法来使“病态性”问题转化为“良性”问题进行求解。
解卷积可以理解成对原始目标散射信息的估计,如何使估计量达到最优是需要解决的问题。熵可以用来衡量信息量的大小,通过使信息熵最大来恢复出散射信息是可行的。原始场景 Frieden熵的表达式为[11]

此时,Frieden熵与信息论中的香农(Shannon)熵具有相同的表达式。
根据正则化的方法,可以将熵的求解问题转化成有限制条件的优化问题:
式中:ε为xj相对变化量的门限值。可认为此时获得的解最优。
每次迭代过程主要包括:
(1) 初始化λi,0,与卷积核矩阵点乘之后进行指数运算得到xj;
(2) 将卷积核矩阵与式(1)中的计算结果进行点乘;
(3) 将yi与过程(2)中的结果进行点除,再进行对数运算;
(4) 将λi,k与过程(3)中的结果相减得到λi,k+1。上述过程的主要运算包括两次点乘、一次点除、一次指数运算、一次对数运算,所以每次迭代计算的复杂度为O(Ll og2L)。
从算法实现过程可以看出,最终超分辨的性能主要和λi,0的初始化、迭代终止条件中ε的选取有关。λi,0的选取与最初的熵有关,均匀地选取λi,0,即所有λi,0初值均相等,可以使初始熵达到最大,有利于减少算法执行的时间。ε的选取与迭代的次数有关,此算法是将噪声当作信号进行处理,随着迭代次数的增加,可能会导致噪声也被相应地放大。因此,选择合适的λi,0和ε有利于超分辨的实现。
3 最大熵算法仿真和实测数据验证
3.1 最大熵算法仿真
此次仿真设置的场景和图 2一致,均是由 13个点目标组成的X形状。在信息传输的过程中加入不同程度的噪声,其他相关仿真参数为:λi,0=0,i= 1,2,… ,L,ε= 1 0-5。接收到的原始数据以及经过最大熵算法和FCID-CID算法处理之后可以得到图5中的结果,图中上排表示不同信噪比(Signal to Noise Ratio, SNR)下仿真声呐接收的目标场景,中排表示经过最大熵算法处理后的场景,下排表示经过FCID-CID算法处理后的场景。
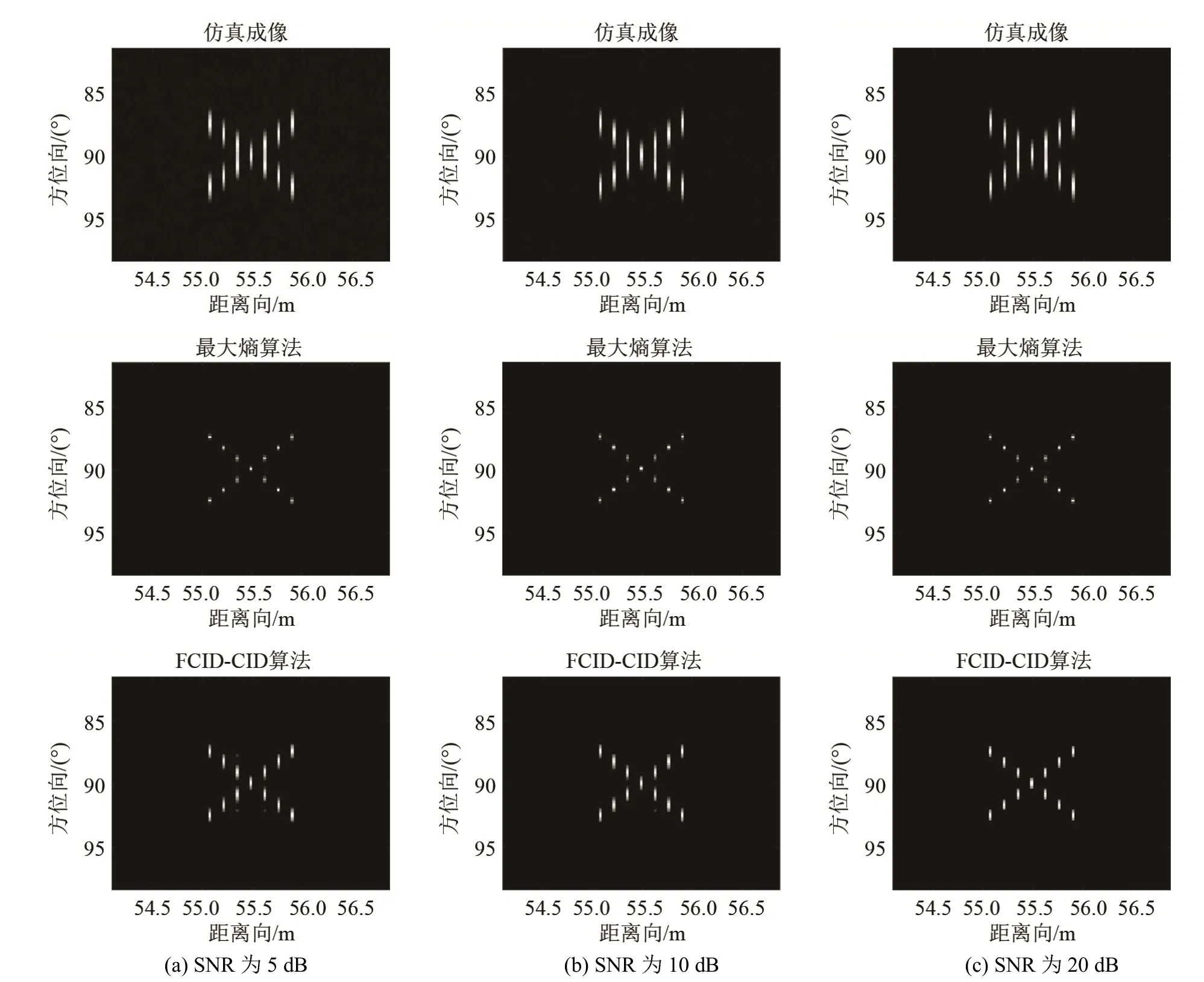
图5 仿真声呐与最大熵算法、FCID-CID算法不同信噪比下成像结果Fig.5 Imaging results of simulated sonar, maximum entropy algorithm and FCID-CID algorithm under different SNRs
从图5中可以看出,经过波束扫描之后的图像有很明显的模糊,原本清晰可以区分的目标变得不可区分,这是接收到的数据被滤除高频信息造成的。在经过两种算法处理之后的数据,均可以区分出被波束扫描造成的模糊数据,很明显地显示出了原始的点目标场景,实现了点目标的超分辨。但是最大熵算法处理之后的结果要比FCID-CID算法处理的结果具有更好的超分辨性能,更接近于实际的仿真场景。
同时,为了更好地显示出图5中细节的差别,利用Photoshop的曲线工具(第一次明暗度输入设置为17,明暗度输出设置为146;保存后第二次明暗度输入设置为93,明暗度输出设置为191)增强两幅图像的对比度,可以得到图6,从图中可以看出,不同信噪比下,两种算法均能较好地恢复出原始的散射点目标。
图6 最大熵算法、FCID-CID算法不同信噪比下对比度增强后成像结果Fig.6 Enhanced imaging results of maximum entropy algorithm and FCID-CID algorithm under different SNRs
为了使这种说法更具有说服力,引入图像熵的概念来评价成像的效果。图像熵是用来度量图像的聚焦程度的,同一幅图像的图像熵越小,其聚焦性能越好[14]。图像熵的定义为


表1 不同信噪比下不同成像算法的图像熵Table1 Image entropy of different imaging algorithms under different SNRs
从表1中可以看出,不同信噪比下,经过最大熵算法和FCID-CID算法处理之后的图像熵相对于原始数据的图像熵明显下降,说明处理之后的图像聚焦性能更好,原本不可区分的点目标变得清晰可以区分,这与图5中的结果一致。比较最大熵算法和FCID-CID算法可以看出,最大熵算法处理之后的图像熵的下降明显要比FCID-CID算法处理后的下降得多,说明该算法具有更好的超分辨性能。
为了更直观地说明该算法的超分辨性能,画出某一距离向点目标的方位向剖面图结果,如图7所示。从图7中可以看到,经过波束扫描的方位向剖面图的两个点目标只出现了一个峰值,两个目标不可区分;但是经过最大熵和FCID-CID算法处理之后可以明显看出两个峰值,可以明显区分出两个目标,验证了两种算法的超分辨性能。通过最大熵算法和FCID-CID算法的比较可以看出,前者无论是在点目标的区分还是在噪声的抑制上面都表现出了优于后者的性能。

图7 最大熵算法、FCID-CID算法不同信噪比下方位向点目标剖面图Fig.7 Azimuth profiles of point targets processed by maximum entropy algorithm and FCID-CID algorithm under different SNRs
为了进一步探究最大熵算法能够适用的信噪比,进一步减小信噪比得到图8。
图8中第1排为不同信噪比下仿真声呐接收到的目标场景,第2排为最大熵算法处理后的场景,最下排为某一距离向上两个点目标的剖面图。从图8中可以看出,在信噪比较低的情况下(0 dB, -5 dB,-10 dB)该算法仍能有很好的超分辨性能;在信噪比减少至-15 dB时,恢复出的原始场景有明显的噪声干扰,点目标也不如高信噪比下区分明显,而且方位向上点目标的剖面图有明显被放大的部分噪声,产生虚假目标,妨碍对真实目标的判断。
3.2 实测数据验证
为了更好地说明该算法的实用性,下面对声呐的实测数据进行处理来验证该算法的超分辨性能,
实验所用参数与上述仿真参数设置相同。实验对水池中悬挂两根细线的圆环进行测试,通过终端显示软件实时显示,并可以将显示的图像的数据进行保存,具体的实验场景如图9所示。
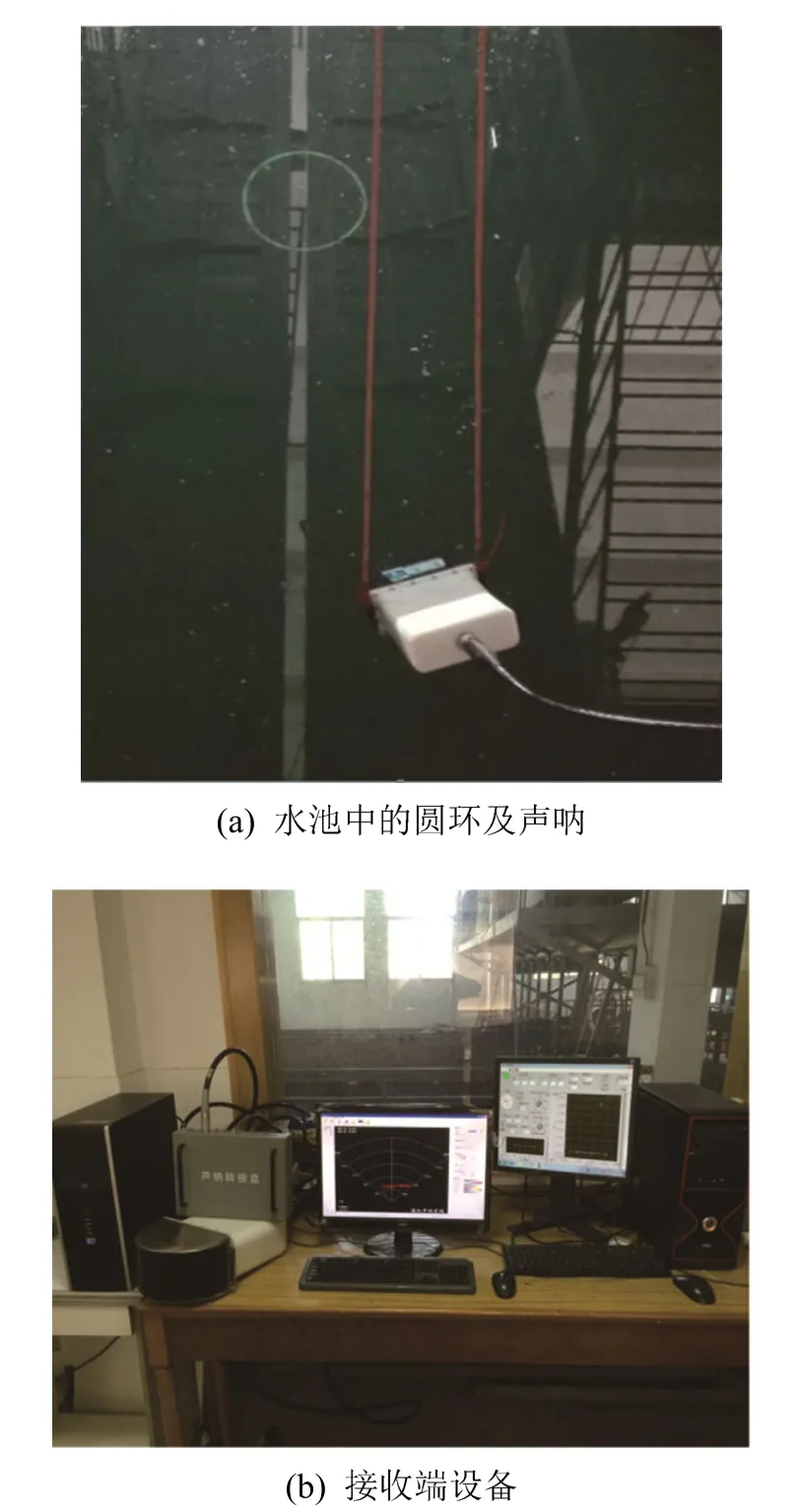
图9 水池实验场景Fig.9 Pictures of the pool experiment site
将获得的实测圆环数据保存后,用Matlab软件进行处理得到的结果如图10所示。

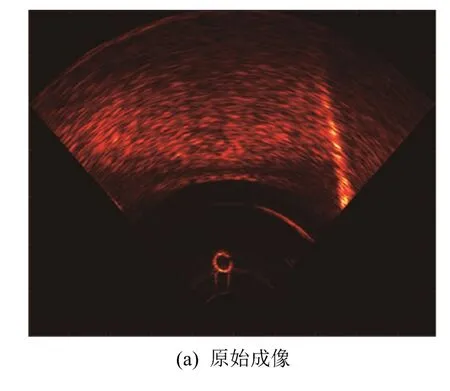

图10 实测数据成像处理效果对比Fig.10 Imaging results of the measured data processed by different algorithms
从实测数据的处理结果可以看出,原始接收的数据在上方有很明显的模糊,但是在经过算法处理之后,细节变得清晰,更容易区分。计算原始成像、最大熵算法成像和FCID-CID算法成像的图像熵,可以得到如下结果:
可以看出,在经过最大熵算法处理之后,图像熵已经有所减小,但是下降有限。这是因为改善后的图像只在上方的细节方面重新聚焦,原始圆环已经聚焦,而上方聚焦的部分占总体的比例较少,所以图像熵下降很少,但是总体来说,图像的聚焦程度仍有所改善。此外,最大熵算法处理的图像熵低于FCID-CID算法处理的图像熵,这也和3.1节仿真结果一致,验证了最大熵算法较传统的超分辨算法在性能上有了进一步的提高。
4 结 论
本文的研究基于课题组研制的一款多波束成像声呐,建立了方位向的卷积模型,利用信号处理的方法来改善方位向的分辨率。通过解卷积的方法恢复出原始目标的散射信息,以最大熵来正则化解卷积的“病态性”问题。经过不同信噪比下的仿真和与FCID-CID算法的比较,可以看出本文算法在较低信噪比下仍能实现超分辨性能并且性能优于FCID-CID算法。此外,引入图像熵的概念衡量算法处理之后的图像聚焦程度。同时,声呐实测数据的处理进一步验证了该算法的超分辨性能。但是,仍有一些问题需要继续探索:如何实现最大熵的加速算法和更有效地去除噪声,需要对这些问题进行深入的研究。