水下发射水动力的多尺度预测网络研究1)
2021-03-10岳杰顺权晓波叶舒然王静竹王一伟
岳杰顺 权晓波 叶舒然 王静竹 王一伟,2)
∗(中国科学院力学研究所流固耦合系统力学重点实验室,北京 100190)
†(北京宇航系统工程研究所,北京 100076)
引言
航行体出水过程中的出筒、水下航行阶段,常常伴随着自然空泡和通气空泡的产生、断裂、溃灭、压力脉动等现象[1].形成复杂的汽液固耦合效应,对航行体载荷和运动的预测造成困难[2].剧烈的压力脉动也很给航行体水下发射的稳定性及机动性带来了极大的挑战.因此对空泡的演化和压力特征进行预测研究,对航行体的结构强度设计以及安全发射有着非常重要的意义.气泡的膨胀、收缩以及脉动等动力学行为很大程度上取决于发射条件[3].实际工程需求中,在给定基本几何构型和水深、压差等初始条件下,需要能够迅速获得航行体的尾部压力脉动响应,进而获得弹道曲线[4].传统的方法着重对整体过程进行实验观测或数值模拟[5-8],效率比较低,只适用于特定工况或机理研究,很难满足工程中的弹道优化问题.
一些简化的计算方法,例如势流理论将回转体流场速度势看作一个随回转体运动的点源和位于空泡轴线处的线源的叠加,从而建立空泡波动预测的理论模型[9].摄动理论是在弹道扰动很小的情况下,用线性化函数逼近非线性函数,进行弹道的修正[10].这类简化方法能够在一定程度上提高空泡和弹道预测的效率,但是这类方法适用的情况有限.
近年来,随着人工智能技术的发展,机器学习和神经网络的方法在参数预测,流体模拟和特征提取等领域中逐渐广泛应用.给定若干种构型或发射条件进行CFD 模拟,利用这些结果对神经网络进行训练,在优化过程中利用训练好的神经网络替代CFD 分析,可以迅速给出弹道或优化设计.魏倩等[11]提出了一种基于BP 神经网络的中制导改进算法,预先离线训练、学习,大大缩短了计算时间.邵雷等[12]利用BP 神经网络对非线性函数的逼近特性,通过弹道数据库训练网络,实现中制导弹道在线生成.吴朝峰等[13]提出了基于遗传算法优化的BP 神经网络,直接对外弹道落点进行了预测.张秦浩等[14]使用Q-learning 强化学习预测弹道,提高了制导精度.
宫兆新等[15]模拟了水下发射过程,表明通气空泡和燃气尾泡的形状以及弹体运动轨迹会受到发射参数的影响.因此对神经网络多参数识别和多目标优化的能力提出了较高的要求.深度学习模型由于所需的输入数据集少,训练效率更高,预测能力更好等特点,被广泛运用到流体力学以及其他各类物理过程的建模和预测中[16].Tang 等[17]建立了基于残差U-Net 和卷积长期短期记忆(LSTM)递归网络的深度学习代理模型,并将其用于预测地质模型中的动态地下流动.Jagtap[18]采用物理信息神经网络中进行回归预测方程的解,获得了线性和非线性偏微分方程的解的曲线.陈家扬等[19]利用深度学习网络高效的特点实现了短期风功率预测,为调峰容量提供依据.李江等[20]提出一种将深度卷积神经网络用于弹道目标微动分类的方法,实现目标预测.Wang 等[21]利用长短期记忆网络从历史轨迹中预测出民航客机未来的移动趋势.这些例子充分说明可以基于数值模拟的结果,利用深度学习网络的泛化性构建模型,具有预测航行体的水动力和弹道曲线的潜力.
此外,水下发射涵盖的出筒、水下航行中的空泡断裂、溃灭现象,造成压力非线性的剧烈脉动.对于这种整体趋势叠加强噪声的数据,需要使用一些新的技术,例如多尺度、多分辨率网络,使网络能够实现发射全过程的预测.同时要求神经网络满足一定的物理约束,而不是简单的完全基于数据.目前有一些将这些新技术运用到其他领域的例子,Wang 等[22]利用代理模型进行多尺度建模,应用于材料力学中的动态变形,大大降低了计算成本和误差.Wang 等[23]结合了深度学习技术和局部多尺度模型简化方,法来预测多孔介质的流动动力学.Yang 等[24]提出了一种基于高斯过程回归的多保真度方法,将物理系统的直接观测视为高保真数据,而随机输出被视为低保真数据,重构了稳态传热问题的温度场.Meng 等[25]将数据分解成线性和非线性部分建立模型,学习低和高保真度数据之间的复杂非线性相关性.这种多尺度预测的概念类似CFD 中广泛采用的大涡模拟模型[26],对于大尺度的涡使用高分辨率的直接模拟,小尺度的涡使用模型来封闭.多尺度方法在具有强噪声数据分析中也已经被广泛使用,例如医学信号分析[27],水轮机振动非线性信号分析[28].
本工作通过发射过程的数值模拟、气泡演化的理论分析和深度学习的智能方法研究了空泡与航行体相互作用的问题,在模拟数据和理论公式的基础上,提出了一种具有物理意义的多尺度深度学习模型.该网络模型以一维卷积网络为基础,构建了一种编码-解码型网络结构,通过不同的采样频率将原始数据划分为大尺度和小尺度,进而训练低保真度和高保真度的网络.从而实现对不同物理过程的响应和捕捉.并通过测试和验证说明给定不同发射条件下,该深度学习网络模型能够实现航行体受力特征的快速预测,从而为运动和弹道的预测提供依据.
1 输入数据的生成及航行条件的参数化方法
1.1 数值计算方法
本文采用的人工智能的深度学习网络,需要采用数值模拟方法建立大量的输入数据进行网络的训练.采用商业CFD 软件Fluent 对发射过程进行动态数值模拟,将获得的尾部峰值压力曲线作为输入数据和预测目标.此外,需要将发射条件转化为相同维度的时序数据张量才能用于网络的训练.流场分析中不需过多考虑三维外形的流场细节,但是需要实现出筒过程的气泡膨胀、收缩和断裂等关键过程.
将计算的航行体模型简化为圆柱回转体构型,并将复杂的三维发射过程简化为二维轴对称问题.此外,由于仅研究尾部的压力脉动,仅模拟尾部的通气空泡,忽略肩部的附着空泡.采用动网格的动态层状网格技术实现出筒过程和航行过程的刚体运动的过程,整个流场的网格均是四边形单元.建立三个区域的网格,一个是周围的静止区域,另两个分别是中间上下两部分的变形区域,之间以interface 连接,如图1.多相流物理模型采用VOF 模型,湍流模型采用k-ε RNG 模型,物理时间步长取dt=0.5 ms.

图1 计算区域划分Fig.1 Computational domain
由于发射参数对航行体水下运动的影响较大,所以需要综合考虑发射速度、发射水深和出筒压差对空泡的影响.背景压力随水深变化,给定发射筒内初始静温出筒压差范围.出筒初始速度范围考虑到计算效率的限制,所取工况数量有限,但应该尽可能均匀的涵盖目标范围内的情况,使预测工况作为内插而不是外插条件,这样更有利于获得可靠的神经网络具体的工况设置见3.1 节.运动加速度考虑了3 种情况,即零加速度、固定减速、随速度变化减速.形成了共计108 组样本的输入数据.
1.2 Rayleigh-Plesset 气泡方程式的气泡演化的理论关系
现有的机器学习大多直接用作黑盒工具,对数据直接进行操作.为了使该深度学习网络的训练过程具有一定的物理性和泛化性,需要发展基于空泡演化的物理知识发现与特征提取.可以将气泡演化的机理看作是物理过程未受干扰的线性过程[29],这一部分作为输入引入网络;而航行体和壁面的影响可以看作是非线性因素,这部分不通过理论模型处理,而只通过数据和网络预测.因此对单气泡演化机理进行探索,将获得的气泡内压变化曲线,作为输入数据,提供监督.
本文通过描述液体中球形空泡半径随时间变化规律的Rayleigh-Plesset 方程,获得气泡内压

其中,R为气泡半径,ρl为液相密度,νl为液相的运动黏性系数,σ 为相间表面张力系数,pB为泡内压力,p∞为背景压力.pB初始值与筒内初始压力相同,使用通过四阶龙格库塔方程求解R-P 气泡方程式,得到该时间步的气泡半径R,令==0,可以得到该瞬时的泡内压力,再将结果代入下一时间步的迭代.最终得到气泡半径和泡内压随时间变化的关系[30].
1.3 输入数据
图2 是数值计算的气体体积分数.航行体出筒后在筒口形成一个逐渐膨胀的球状气泡.随着航行体的运动弹尾气泡被拉断,断裂后从中心形成一个回射流,将尾空泡铲离壁面,尾流中的旋涡造成气泡剧烈膨胀和收缩,使这个阶段的压力呈现脉动规律.证明结果符合文献中非定常空化流的流动结构和机理[31].

图2 数值计算的气体体积分数Fig.2 Simulated vapor volume fraction
获得基本流场后,对于不同的发射速度、深度和加速度条件需要将其转化成适用于网络输入的参数化表达.例如速度随时间变化的曲线、深度(转化成背景压力)随时间变化的曲线.深度神经网络进行数据训练前训练数据样本需要进行归一化或无量纲化处理,其目的是取消各维数据间数量级差别,避免因为输入输出数据数量级差别过大而造成网络预测误差较大.考虑到数据的物理性质,本文采用无量纲参数对原始数据进行无量纲化,速度和压力的无量纲参数分别取U∞和.对神经网络数据进行无量纲处理获得的曲线如图3.可以看出各通道的数据达到了近似的量级.

图3 无量纲化后的输入数据Fig.3 Dimensionless input data
2 网络模型
2.1 一维卷积网络模型
卷积神经网络凭借其局部连接、权值共享、下采样等特性可以保留重要的参数,来达到更好的学习效果.二维卷积被广泛用于处理图像和机器视觉,而一维卷积通常用在处理文本中[32].处理文本的时候,通常卷积操作的卷积核kernel 的大小与文本中每个字符向量的长度相同.对于本文的数据,可以看成是一系列字符拼凑成的曲线,因此选择通过一维卷积网络来进行数据的预测.实际的网络模型搭建中,在基于Keras 库的TensorFlow 框架中通过Convolution1D 函数实现.
分别对上述初始条件的发射问题进行了批量的数值模拟.目标输入共计108 组数据.从其中随机取10%即11 组数据作为测试数据样本,其余97 组数据作为训练数据样本.以速度曲线、背景压力曲线以及理论公式的结果曲线构建108×400×3 的数组(网络的通道数channel=3,总时间t=0.8 s,取值间隔dt=0.002 s),作为输入数据的x;以底部峰值压力曲线构建108×400×1 的数组,作为输入数据的y.建立映射f(x)=y,通过神经网络训练寻找映射关系.深度学习网络预测流程图如图4.输入的数据分别为:底部压力pbtm、运动速度U、理论结果prp、背景压力pbg.建立映射pbtm=f(U,prp,pbg).进行网络的训练,导入新的一组进行预测,就可以得到新的.其中出筒压差通过理论结果prp的初值体现.
2.2 编码--解码网络结构

图4 预测流程图Fig.4 Prediction flow chart
本文的网络结构包含多层一维卷积,构成一种编码器--解码器网络结构[33].编码器的任务是在给定输入数据后,通过神经网络学习得到输入数据的特征谱;而解码器则在编码器提供特征谱后,逐步实现每段数据的类别标注,也就是分割.可以解决卷积--全连接结构网络的存储开销很大、计算效率低下、感受野太小的问题,提高预测精度.
本文采用的网络如图5,类似现在图像分割采用的比较多的Segnet 和U-net,对输入层使用三层一维卷积+池化进行编码,再使用三层一维卷积+上采样进行解码.在典型的编码器--解码器结构例如FCN、U-net 等网络中,都使用到了上采样技术.该网络可以接受任意尺寸的输入数据,采用反卷积层和上采样,使它恢复到输入数据相同的尺寸.在卷积层之后设置池化层和上采样层,能够减小参数的数量和计算量,在一定程度上也控制过拟合.为了让神经网络学习复杂的非线性曲线,将非线性激活函数ReLU 应用于某些层.采用Adam 优化器训练网络,并采用反向传播算法更新神经元.

图5 本文的网络结构Fig.5 The network structure
2.3 多尺度网络
从模拟结果可以看出,尾空泡在压差的作用下初始呈现出光滑膨胀的特点,底部压力逐渐降低,比较类似气泡方程式的规律.出筒后运行到一定时刻,尾部的低压区导致空泡拉断.断裂后附着在尾部的空泡开始出现回射流和气泡剧烈震荡等现象,产生压力脉动.该脉动的频率相对气泡膨胀和收缩的频率非常高,在一定程度上给神经网络的预测带来了困难.因为网络需要既能分辨气泡膨胀和收缩的光滑性规律,即具有大尺度分辨率;又要能分辨脉动的频率、幅值以及出现的位置等规律,即具有小尺度分辨率.因此,本文提出一种多尺度网络模型,分别预测两种特征,首先需要对原始数据进行一定的分解处理.
为了使输入数据满足多尺度的网络结构,需要对数据进行前处理,将曲线拆分为大尺度的宏观变化率和小尺度的瞬时脉动率.而且,基于实际经验,弹道的位移是对压力脉动产生加速度的二次积分,对瞬时突变的压力脉动效应并不太敏感,所以可以将压力脉动进行一定程度的简化,这一点支撑了该方法的合理性.
在MATLAB 中对原始数据进行移动平均低通滤波,滤波窗口宽度N默认为5.对于本文数据中滤波器使用的原则是:尽可能使过滤后的曲线光滑,但保证不抹去基本物理规律.图6 对比了不同窗口大小的过滤结果.通过FFT 运算将信号转换到频域.通过频域的振幅谱可以看出,通过低通滤波器,高采样频率的振幅被截断,压力曲线的震荡和毛刺被过滤掉,留下光滑低频部分.默认的窗口大小的过滤结果并不令人满意,通过尝试多种N的取值(5,10,15,20,限于篇幅并没有完全展示),取N=20 过滤后的压力曲线比较满足本文滤波器的原则,利于网络预测.最终选择的窗口大小为N=20.
曲线中可以看出,空泡断裂前的光滑区域和断裂后的高频震荡区域有很大的区别,如果使用一套网络或一种超参数设置会很难捕捉到两部分的特征.一种解决办法是,将前半部分和后半部分断开,分别采用两种网络.但是,这会导致压力突变位置的寻找成为一个新的难题,而且两段数据如何衔接也是一个挑战.为了便于网络的预测,该压力曲线可以认为是一系列线性波的叠加,满足信号的叠加原理.那么某处的振幅可以表达成几个单独波产生的振幅之和.因此本文创新的提出了一种多尺度网络,对于全过程分别构建基准压力曲线和脉动压力曲线预测网络,两种网络采用不同的尺度的分辨率,再将两个网络的预测结果叠加起来,得出最后的压力曲线.具体做法如下.

图6 不同窗口大小的过滤结果对比Fig.6 Filtered results of different window sizes
之前已经将底部压力曲线进行了过滤,获得了光滑部分的数据,将原始数据减去过滤数据则可以获得脉动部分的数据.通过这个过程完成了特征的分解.对这组数据分别构建网络1 和网络2.如图7 所示.
为了防止过拟合,同时提高网络训练效率,输入数据后进一步对数据进行处理,对每组数据每M个点取一个样本点,网络1 拟合比较光滑的数据,因此M值取较大;网络2 的数据细节更多,取M值较小.网络算法示意和参数设置如表1.
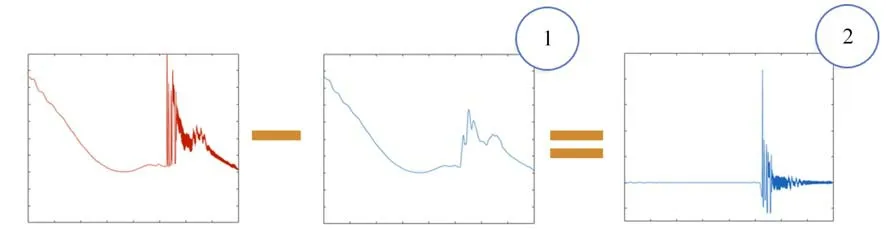
图7 数据的分解Fig.7 Decomposition of data

表1 网络算法示意Table 1 Network algorithm framework
需要强调的是,网络2 的输入需要加入另一条曲线——底部压力,这样能使网络准确识别压力突越位置,提高网络预测的能力.完成预测后通过插值,将网络2 的结果附加在网络1 的结果之上.实际操作中,当无量纲脉动幅值超过0.005 时,则添加脉动量.
3 结果与讨论
3.1 数值模拟结果
图8~图10 分别是不同初始速度、出筒压力和深度的数值模拟压力曲线.可以看出,发射初始阶段压力变化比较光滑,随着气泡膨胀,压力开始下降.到一定程度后,空泡开始收缩,压力上升.收缩到一定程度空泡的形态无法维持,产生断裂.断裂后产生剧烈的压力震荡,振荡的频率非常高,随着时间发展,压力脉动逐渐衰减,幅值逐渐降低.
不同的发射条件对底部压力曲线的影响比较大,具体有以下规律.在不同初始速度下,光滑阶段空泡膨胀速率不同,空泡断裂时间不同,断裂后峰值压力不同.不同出筒压差下,初始压力不同,空泡断裂时间不同,断裂后震荡幅值不同.不同筒口深度下,光滑阶段空泡膨胀速率不同,空泡断裂时间不同,断裂时的压力值不同.这些规律与文献[8]中的结果类似,证明了本文数值模拟结果的可靠性.

图8 不同初始速度的数值模拟压力曲线Fig.8 Simulated pressure curve at different U0
3.2 单尺度网络
图11 显示了单尺度网络预测的随机测试结果,图中的模拟结果显示采用网络1 的分辨率(即向量维度为80).可以看出,光滑阶段的网络预测结果和数值模拟结果比较接近,可以大致预测出不同发射条件下的变化规律,也能大致分辨出压力突变的位置.但是无论如何调整网络参数,也无法分辨出压力脉动的特征.此外,由于网络压力脉动效应的拟合,又会使得光滑曲线阶段产生锯齿状的微小波动,产生过拟合,使预测精度降低.说明单个网络的预测能力受限于同一尺度的分辨率,很难同时对两种分辨率的数据同时处理.说明了本文提出的多尺度网络的必要性.

图11 单尺度网络预测的压力曲线结果Fig.11 Test results for single-scale network
3.3 多尺度网络
图12 是采用多尺度网络模型后,网络1 的随机测试结果,可以看出,网络1 对光滑曲线的预测有很好的效果,能够预测不同发射条件带来的影响规律,而且对压力突变的位置和突变后曲线的整体走势都能进行很好的预测.


图12 网络1 的随机测试结果Fig.12 Random test results for network 1
图13 是网络2 对震荡的随机测试结果,可以看出,网络2 对震荡的频率和幅值都能获得很好的预测结果,而且可以获得小幅度震荡的内在规律.

图13 网络2 的随机测试结果Fig.13 Random test results for network 2
图14~图16 是网络1 和网络2 的结果叠加的最终预测结果,可以看出,对于任何发射条件,不同初始速度、出筒压差、深度,叠加后的多尺度网络(ML-multi)都能获得很好的预测结果.无论是光滑曲线、压力突变的位置、震荡的频率和幅值都和数值模拟的结果吻合很好.网络2 对整体的预测结果有大幅度的提升,使得整个深度学习模型能够预测压力震荡频率和幅值的能力.此外,整体曲线的走势和突变位置取决于大尺度网络的预测能力,而脉动的频率和幅值取决于小尺度网络的预测能力.图15(b)结果中,深度学习未能预测出第一个峰值,经观察发现该处的震荡频率较高,在网络输入数据处理阶段,该峰值被过滤掉.因此在数据处理时,可以根据实际情况调整过滤窗口的大小,或者利用幅值判断该处分量是否应该被过滤,获得更精确的预测.后期可以分别对两个网络进行进一步优化,继续提高预测的精度.
不同初始速度的预测结果如图14 所示.

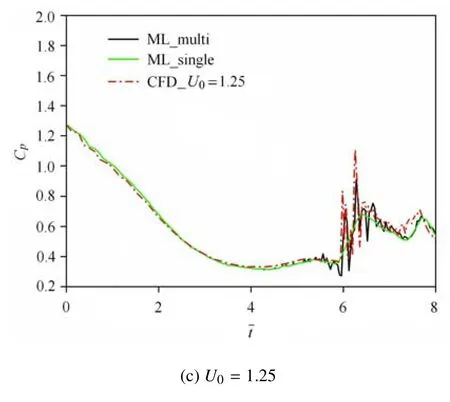
图14 不同初始速度的预测结果Fig.14 Prediction results at different U0
不同出筒压差的预测结果如图15 所示.

图15 不同出筒压差的预测结果Fig.15 Prediction results at different dp

图15 不同出筒压差的预测结果(续)Fig.15 Prediction results at different dp(continued)
不同深度的预测结果如图16 所示.


图16 不同深度的预测结果Fig.16 Prediction results at different depths

图17 测试集与CFD 结果的平均绝对误差Fig.17 MAE of test set

图18 测试集与CFD 结果的均方根误差Fig.18 RMSE of test set
图17 和图18 分别给出了一个测试集(11 组测试样本)与CFD 结果的平均绝对误差(MAE)和均方根误差(RMSE),对单尺度网络和多尺度网络进行了对比.平均绝对误差相当于L1范数,均方根误差相当于L2范数.可以看出,本文提出的多尺度网络在平均绝对误差上和单尺度网络比较接近,并在一些样本中获得了误差较小的结果,说明了基础光滑曲线预测的合理性,也证明压力脉动的添加并不会降低整体的预测精度.多尺度网络在误差上和单尺度网络相比提升并不太明显,说明本文提出的网络模型通过引入物理约束,已经能够满足大尺度情况下的压力预测.而小尺度网络在此基础上发挥了锦上添花的作用,为压力预测曲线添加了脉动效果.均方根误差上,多尺度网络在大部分样本中也比单尺度网络的结果好,说明这种网络模型对数据所有区域的预测水平都相当,优化了脉动部分的预测.
图19 给出了某一个预测样本的频谱对比.可以看出,单尺度网络过滤掉了高频脉动的振幅谱,因此无法体现压力脉动的细节.而多尺度网络可以预测出高频振荡的趋势,而且在中频区域的振幅与原始数据比较接近.证明了本文提出的多尺度网络具有对压力脉动预测的能力.

图19 某一个预测样本的频谱对比Fig.19 Spectral comparison of a prediction sample
3 结论
本文通过对航行体发射和水下航行的动态数值求解的和空泡演化理论机理的研究,建立了深度学习预测模型的输入数据库,提出了一种多尺度深度学习神经网络,并对其进行了训练和验证.
数值模拟结果显示,底部压力曲线的计算符合物理规律.初始阶段压力变化比较光滑,随着气泡膨胀,压力开始下降.到一定程度后,空泡开始收缩,压力上升.收缩到一定程度空泡的形态无法维持,产生断裂.断裂后产生剧烈的压力震荡,振荡的频率非常高,随着时间发展,压力脉动逐渐衰减,幅值逐渐降低.发射条件对空泡的发展和底部压力影响比较大.会导致不同的空泡膨胀速率、空泡断裂时间、断裂后震荡幅值等.
单尺度网络预测的压力曲线结果,可以大致预测出不同发射条件下的规律,也能大致分辨出压力突变的位置.但是无论如何调整网络参数,也无法分辨出压力脉动的特征.突显出了本文提出的多尺度网络的必要性.
本文提出的具有物理意义的多尺度网络在数据较少的情况下,对于多种常见的发射初始条件,网络都能获得很好的预测结果.无论是光滑曲线的走势、压力突变的位置、震荡的频率和幅值都和数值模拟的结果吻合很好,从而实现对不同物理过程的响应和捕捉.今后的研究中可以分别对两个网络进行进一步优化,继续提高预测的精度.此外,拟将外延参数的预测作为进一步的研究方向,提高网络的泛化能力.
