一种可上下移动的多喷头智慧喷药机设计*
2021-03-10崔雅筠
朱 颜,崔雅筠
(聊城大学 机械与汽车工程学院,山东 聊城 252059)
水果业的发展对促进我国经济的发展具有重要意义。喷药能够有效防止病虫危害,有利于果树的正常生长。市面上的喷药机主要包括背负式喷药机、车载式喷药机、牵引式喷药机等,这些喷药机喷射范围小、浪费人力且不利于喷药人员的健康,不适合果树的高效喷药。
目前,美国等发达国家对喷药机的研究成果已经处于先进水平。例如,Faial B S等人通过计算机系统的研究,改良了无人机喷药路线,加强了无人喷药技术的精确性[1];Tona E等人通过经济技术分析,提出了以自主机器人平台提高喷药精度的思路[2];Berenstein R等人研究出了可调整喷嘴角度、根据识别目标改变喷涂直径的农药喷洒装置,减少了农药的浪费,提高了喷药精度[3]。
近年来,我国对农业喷药机的研究取得了一定成果。崔龙飞等人通过建模补偿、算法研究,设计了有利于地面颠簸时保持喷药平稳的双钟摆被动悬架式喷雾机喷杆[4];张勇[5]、殷长昊[6]、张岩[7]等课题组分别对喷药装置的控制系统进行了研究,为植保机器的智能化做出了贡献;丁在兴等人设计了一种通过红外测距传感器定位的适用于林区苗圃的小型自动喷药机[8]。
综上所述,国内外学者为加强喷药机的智能化、自动化,对喷药机的控制系统、喷药结构进行了研究。作者在国内外研究成果的启发下,拟设计一款基于计算机视觉的可上下移动的多喷头智慧喷药机,以适应果园作业的需求。
1 可上下移动的多喷头智慧喷药机的总体结构与工作原理
1.1 总体结构
可上下移动喷药的多喷头智慧喷药机主要由行走装置、储药装置、喷药装置、电路与控制装置组成,它的整体结构如图1所示。

图1 可上下移动的多喷头智慧喷药机的总体结构
1.2 工作原理
可上下移动喷药的多喷头智慧喷药机的工作原理为:(1)启动电源,发布指令后,步进电机驱动行走轮行走;(2)摄像头负责识别路况、定位目标点并将信号传给控制系统,定位到目标树木后,行走轮停止;(3)移动装置带动连接杆匀速上升,以实现多喷头自下而上雾化喷射药物;(4)连接杆运动到最高限位点后,多喷头停止喷射药物;(5)移动装置较快地带动连接杆运动到最低限位点;(6)若继续喷射下一目标,则重复以上命令;若喷射药物任务结束,则回到初始点,停止作业。
2 可上下移动的多喷头智慧喷药机主要装置的设计与分析
2.1 行走装置的设计
可上下移动喷药的多喷头智慧喷药机行走装置的三维模型如图2所示,其主要由行走轮、步进电机放置支架、步进电机、承重底板等组成。
行走装置采用四个步进电机驱动四个行走轮完成行走作业,满足控制喷药机在目标点启停的需求;承重底板作为喷药机的主要承重单元,选用了抗压性能好的合金钢。
2.2 储药装置的设计
可上下移动喷药的多喷头智慧喷药机的储药装置的三维模型如图3所示,其主要由水泵、储药箱、软水管组成。
塑料包括聚乙烯、聚丙烯等通用塑料,聚酰胺等工程塑料,光敏塑料等功能塑料。聚乙烯材料价格便宜、材料易得、耐腐蚀性强、紧密性好、使用寿命长,因此选用聚乙烯为储药箱的制作材料。储药箱容积为20L,可容纳较多的药液;箱内放置有滤网,以避免药渣进入喷药装置中。
选用了直径为16mm具有导水层、防爆层、皮肤层三层结构的软水管,以增强水管的使用寿命。水管的一端与储药装置的储药箱连接,另一端与喷药装置连接。
2.3 喷药装置的设计
可上下移动喷药的多喷头智慧喷药机喷药装置的三维模型如图4所示,其主要由移动装置、喷头连接杆、喷头组成,移动装置主要由步进电机和丝杠滑台组成。
连接杆连接了丝杠滑台和三个喷头。在步进电机的驱动下,多喷头在丝杠滑台、连接杆的带动下可实现一定高度范围内的上下喷药。
2.4 电路与控制系统的设计
电路与控制系统包括单片机最小系统、检测系统、稳压系统、电机驱动系统、蓝牙通讯系统等电路系统。喷药机运用C语言编写控制程序将程序烧录入STM51单片机后对整机进行控制,检测系统将提取的图像信息转变为数据信息后传给单片机最小系统,稳压系统实现了电压的稳定,驱动系统驱动步进电机工作,蓝牙通讯系统接收通讯信号[9]。
2.4.1 稳压系统的设计
在降压电路中,采用LM2596芯片将DC24v电压降至 DC12v、DC5v、DC3.3v,分别稳定传输给水泵、摄像头、单片机;在升压电路中,采用MOSFET管半桥驱动电路将DC24v电压升至DC60v作为步进电机的工作电压,满足大功率驱动的要求[10-11]。
2.4.2 检测系统的设计
为了实现自主检测道路并规划行走路线,增强喷药目标的精确识别能力,可上下移动喷药的多喷头智慧喷药机采用计算机视觉的方法提取图像。
(1)图像采集:主要包括两个高清摄像头,一个摄像头负责拍摄前进道路的路况,另一个摄像头负责拍摄目标树木、定位喷射目标。
(2)图像处理:摄像头采集到的图片信息采用卷积神经网络技术(Convolutional Neural Networks,CNN)进行处理。
3 可上下移动喷药的多喷头智慧喷药机关键部位的可行性分析
3.1 基于Matlab的振动分析
3.1.1 路面模型的搭建
为保证喷药机行驶的平顺性和喷药的稳定性,运用滤波白噪声法对路面进行路面不平度分析。根据路面的粗糙程度可将路面分为不同等级,喷药机的作业环境为较为平整的土路,因此,按照B级路面的参数进行路面激励分析[12-13]。
路面不平度数学模型如式(1)所示:

运用Simulink模块建立路面不平度仿真模型,如图5所示。

图5 路面不平度的Simulink模型
路面不平度系数Gq(n0)在B级路面的上限为128×10-6m3,下限为32×10-6m3,几何平均值为64×10-6m3,在计算Gain(增益)模块时,Gq(n0)取64×10-6m3。当行驶速度分别为5m/s、15m/s、25m/s时,Gain 模块 K1、K2的值,如表1 所示。
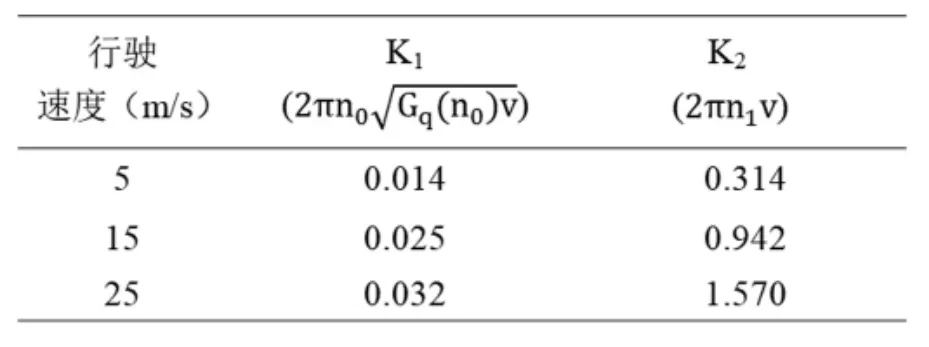
表1 增益K1、K2在不同行驶速度下的取值
将Band-Limited White Noise(限宽白噪声)模块的Noise power(噪声功率)的值设为0.5,从而获得单边功率谱;按照表1对增益模块进行设置。运行Simulink模块、对图像进行处理后,不同行驶速度下路面不平度随时间的变化如图6所示。
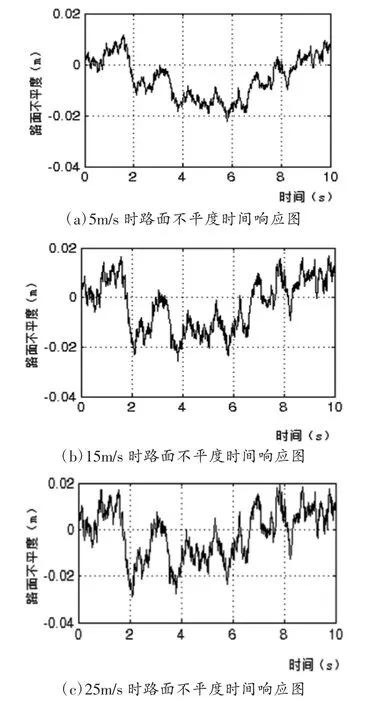
图6 路面不平度随时间响应图
由图6可知,行驶速度不同时对路面激励的振动幅度有影响,但路面高度的变化幅度均在±0.04m之间,行驶速度对路面不平度的影响不明显。因此,在对喷药机进行振动分析时,不考虑行驶速度对振动的影响,选择5m/s的速度进行分析,K1、K2的值分别设置为 0.014、0.314。
3.1.2 振动分析
将喷药机简化为1/4车身车轮二自由度力学模型进行振动分析,简化模型图如图7所示。

图7 车身车轮二自由度简化模型
根据图 7 建立数学模型,如式(2)、(3)所示:

式中,m1为喷药机车轮的质量(kg),k1为喷药机车轮的刚度(N/m-1),m2为喷药机其余部分质量(kg),k2为喷药机车身底部悬架的刚度(N/m-1),c为阻尼(N/(m/s)),x1、x2分别为喷药机车轮、喷药机其余部分的振动位移(m),q为路面不平度。
喷药机的性能参数如表2所示。

表2 喷药机的性能参数
运用Simulink模块搭建车身车轮二自由度仿真模型并设置合适的参数,如图8所示。

图8 车身车轮二自由度Simulink仿真模型
运行Simulink模块、对图像进行处理后,振动位移x1、x2,加速度a1、a2随时间变化如图 9所示。振动位移、振动加速度为矢量,数值代表大小,正负代表方向。

图9 振动位移、加速度响应时间图
通过Simulink模型的To Workspace模块在Matlab的工作空间查看振动位移、振动机加速度的具体数值可知,喷药机其余部分的振动位移x2的最大值为0.0221m,振动加速度a2的最大值为0.1973m/s2;喷药机车轮的振动位移x1的最大值为0.0207m,振动加速度a1的最大值为0.1856m/s2。结合振动位移、振动加速度的最大值和图9可知,喷药机的平顺性良好,能够实现在果园中稳定行走的功能。
3.2 承重底板强度校核
行走装置部分的承重底板是喷药机的承重支撑单元,选用了抗压性能较好的合金钢。承重底板的强度对喷药机的稳定性具有重要作用,因此,对其进行承重分析,校核其刚度是否满足需求具有重要意义。
运用Solidwoks的Simulation模块对承重底板进行了刚度校核。在储药箱装配处施加200N竖直向下的载荷,喷药装置装配处施加100N竖直向下的载荷,其von Mises应力分布云图结果如图10所示。
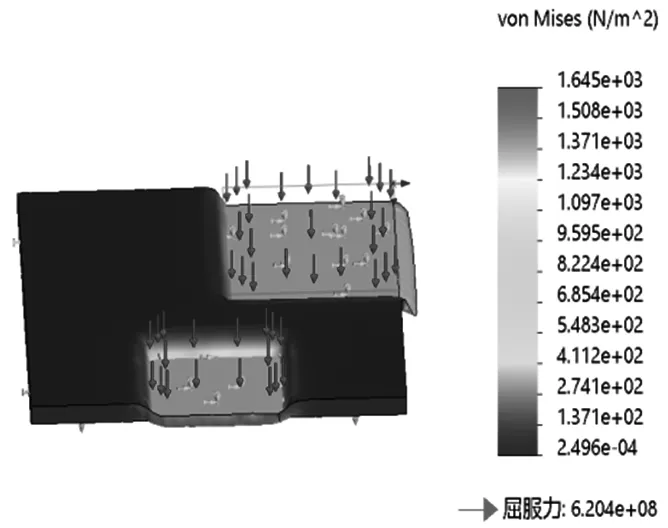
图10 底板von Mises应力分布云图
由图10可知,承重底板受到的最大应力σmax为1.645×103N/m2,合金钢的屈服力 σ 为 6.204×108N/m2,因为σmax<σ,所以底板满足强度要求。
4 结束语
可上下移动喷药的多喷头智慧喷药机克服了传统喷药机的缺陷,采用基于计算机视觉的方法识别路况、定位目标,采用丝杠滑台升降的方式完成连接杆带动多喷头的上下移动喷药。它对提升果树产量、品质,减小喷药人员负担,有极大的帮助。
