特殊领域作战外骨骼机器人的功能展示视频制作
2021-03-09王名祺干静曾博明子微
王名祺,干静,曾博,明子微
特殊领域作战外骨骼机器人的功能展示视频制作
王名祺,干静,曾博,明子微
(四川大学 机械工程学院,四川 成都 610065)
通过分析不同类型外骨骼机器人功能的表达需求,围绕体现人、外骨骼机器人、作战系统设备以及环境联动响应的表达思路,确定利用CINEMA 4D、After Effects、Premiere等软件,提出了制作功能展示视频的具体流程:前期设计时,结合外骨骼机器人及未来城市作战平台的特点,撰写故事性脚本;中期制作需根据脚本进行机器人等装备的模型建造及场景搭建,并完成对应动画的设置,经过调试与检验之后渲染导出各序列动画;将渲染导出的序列放入剪辑软件,按照视听性原则完成后期剪辑。以特殊领域作战外骨骼机器人为例,总结了功能展示视频的制作流程,并解决了制作过程中出现的影响效率的一系列问题。
外骨骼机器人;协同系统;未来城市作战平台;功能展示;视频制作
外骨骼机器人近年来逐渐成为热门话题,通过电影、展览等方式出现在人们的视野中,但由于其研发周期长、研发经费高等特点,对大众来说仍然是个陌生名词。近年来,越来越多功能展示视频用于普及复杂产品,这是一种将产品结构、工作原理化繁为简并直观呈现的展示方式,主要通过三维建模与动画技术真实还原产品,让观看者了解产品的功能特点和应用场景。当外骨骼机器人完成概念设计之后,功能展示视频成为了宣传展示的有效手段。
1 外骨骼机器人的展示需求
1.1 外骨骼机器人的特点
外骨骼机器人是一种结合了人的智能和机械动力装置机械能量的人机结合的可穿戴装备。外骨骼机器人主要有以下特点:
(1)多样性。外骨骼根据不同的划分标准可进行不同的分类,例如根据结构可分为上肢外骨骼机器人、下肢外骨骼机器人、全身外骨骼机器人和关节外骨骼机器人;根据功能可分为增力型、训练康复型和运动辅助型。

图1 下肢与关节外骨骼机器人结构示意图
(2)复杂性。外骨骼机器人由多种系统共同组成,包含机械系统、驱动系统、传感系统、控制系统、绑缚系统等模块,是一种复杂的高精度机器人。在使用外骨骼机器人的过程中还涉及到很多其他因素,比如使用者、使用时所处环境、与外骨骼机器人产生响应的其他装备等,这些事物与外骨骼机器人一起构成了一个庞大的协同系统,协同系统中的各个因素之间都会相互协同、相互影响。协同系统中的单体具有功能复杂性,整个系统也具有信息传递的复杂性。
(3)协同性。在使用外骨骼机器人时,其与使用者之间会产生协同,从而达到增强身体机能的目的。外骨骼机器人也会与协同系统中的其他装备产生协同与反馈,例如对环境的监测、信号接收与控制等。
1.2 特殊领域作战系统及系统活动介绍
现代科技的高速发展和广泛应用推动了武器装备和作战方式发生演变,由此引发了新的军事革命,以信息为基础、信息化武器装备为工具的现代化战争将逐步取代机械化战争,成为未来战争的基本形态。与此同时,城市由于人口比例逐渐增长,意味着越来越多的冲突将发生在城市,使之成为未来战争的主要战场。
特殊领域作战外骨骼机器人主要用于未来城市作战场景中,士兵除了参与传统的地面机动作战,还会参与到纵深机降作战、逐屋争夺作战及其他形式的协同作战中。复杂多变的行进空间、非结构化的行进地形、受限制的空间视野、复杂的敌方火力、长时间的疲劳战斗等作战特点都会给士兵带来未知的挑战,也对外骨骼机器人的人机融合性能够提出了更高的要求。所谓的人机融合,是指一种人、机、环境相互作用的新型智能形式,外骨骼机器人不仅需要满足士兵在穿戴时的人机需求,还需要适应复杂的环境,是协同系统中的核心环节。
通过外骨骼机器人的连接,人的快速决策与机器的高效执行相互协同,人的后天认知能力与机器的数据探测能力相互反馈,使人的负重、机动、感知、持续作战等能力都得到了一定增强,实现人与外骨骼机器人之前的融合与协同,更加适应未来战场复杂多变的要求。穿戴外骨骼机器人的士兵可以与头盔、电台、武器等单兵可穿戴设备结合,可实现通信中继、多平台协同感知等作用,增强作战攻击、有效载荷、生存防护等功能,提高士兵的格斗、平衡、越障、投掷等能力,构成未来单兵特种作战系统;与无人机、无人车、控制终端等无人作战系统结合,可实现电子对抗、多平台协同打击等作用,加强后勤保障、能源管理、战场侦察等能力,构成协同作战系统。

图2 特殊领域作战系统
2 外骨骼机器人功能展示视频制作思路
2.1 功能展示视频的制作原则
功能展示视频是一种将产品以三维动画的形式渲染,并通过后期剪辑与合成,制作成一段可以跨平台独立播放的综合展示视频,它打破了三维软件的局限性,从而可以广泛传播。视频清晰地向观众展示了产品的外观、结构、功能等信息,是全方位展示产品的重要手段。早期的功能展示视频为二维产品展示动画,仅通过二维软件或实物拍摄的方式表达,随着三维动画技术的发展与兴起,传统的二维平面制作方式已经不能满足市场需求,三维产品展示动画凭借它的立体、生动、真实等诸多优势,逐渐占领了功能展示视频的市场。
由于外骨骼机器人的一些特性,在制作相应的功能展示视频时应遵循以下三个原则:
(1)真实感。真实感是制作功能展示视频时的基本原则。首先要注意渲染的真实感,例如材质、光线、环境等要素。其次是传达内容的真实感,不同类型的外骨骼机器人将在作战系统中实现不同功能,例如增强力量、提升耐力、精准打击等,可以通过反复搬举、射击等动作来体现强化效果,利用三维动画技术将这些动作渲染出来,让观看者清楚理解外骨骼机器人的功能。
(2)完整性。制作功能展示视频时不仅要展示外骨骼机器人本身,也要展示其协同系统内的相互响应。制作者可以通过切换不同角度单独介绍协同系统中的某一部分,但也要充分展现其与系统中其他部分之间的连接、反馈与作用。
(3)视听性。功能展示视频需要具有流畅的叙述逻辑,与此同时也应保证画面所传达的信息清晰易懂。在制作视频时要注意镜头的语言艺术,可以通过镜头的切换与组合、剪辑节奏的变换与控制,以及适当加入音效配合增加视频的视听性。丰富的视觉与听觉信息组合能提高视频的视听性,使观众在看懂视频的同时,留下深刻的印象。
2.2 功能展示视频的故事性需求
(1)故事性需求的提出
外骨骼机器人功能展示视频制不仅需要对外骨骼机器人的结构及工作原理进行介绍,更重要的是展示其穿戴效果、使用场景和实现功能。在介绍机械结构时,通常采用结构拆分和镜头推移的手段,但如果展示使用情景时也沿用相同手段,视频则会略显单调乏味,且不能直观反应出使用环境。所以对功能展示视频的制作提出了故事性的需求,通过故事叙述的方式,更加生动全面地表现出特殊领域作战外骨骼机器人的使用情景。
(2)与电影、产品仿真动画在表现需求上的异同
外骨骼机器人功能展示视频制和电影一样,需要脚本的撰写来指导整个故事流畅、自然地展开,但电影制作与功能展示视频制作最根本的不同在于表现需求。电影制作侧重讲故事,导演编剧通过跌宕起伏的剧情,环境氛围烘托以及人物语言、动作、心理刻画等手法,生动地将故事讲述给观众,电影的结局或给观众揭示道理,或留下悬念引人遐想。但功能展示视频更侧重于通过故事来凸显外产品功能,制作者会通过特写镜头或特定动作,辅以文字或字幕描述来达到这一目的。同样以三维动画技术为核心的产品仿真动画对脚本的依赖度就小了很多,运行公式才是制作过程的主导,因而仿真动画的表达重心在于仿真的精密性。
(3)与电影、产品仿真动画在表现手法上的异同
电影、产品仿真动画与功能展示视频制作的不同还体现在表现手法上。对于电影来说,传统的拍摄手法都是实景拍摄,但由于拍摄成本高,受天气、环境等物理因素限制种种缺点,进而许多画面都逐渐由三维动画技术代替完成。电影里有很多虚构情节,导演通过夸张的手法来实现想要表达的内容,这其中与现实存在一定失真。功能展示视频通过模拟产品的真实运作过程从而达到设计预期,是一种体现真实性的表现手法,但精密性并不及产品仿真动画。一方面因为功能展示视频中的协同系统十分复杂,如果完全按照实际力学性能进行模拟工程量会过于复杂,大大降低了制作效率;另一方面因为外骨骼机器人的更新换代速度很快,要做到完全精密的仿真有一定困难。
3 外骨骼机器人展示动画制作流程
3.1 功能展示视频技术路线概述
功能展示视频的制作流程一般由前期设计、中期制作和后期剪辑三个部分组成。前期设计指分镜头脚本撰写,是一个将抽象灵感具象化的过程,也是整个功能展示视频的基础,也是其核心。制作者撰写脚本时需要确定叙述方式、故事节奏、表达重点等要素,通过文字描述将想要展现的画面转换为故事,并为后面的动画制作规划好路线,起到整体把握的关键作用。中期制作包括建造模型、赋予材质、动画设置和渲染输出,是整个展示视频的制作重点,将直接影响到之后的后期剪辑,所以往往也是耗时最多的阶段。后期剪辑包括后期制作和视频输出,在将前面渲染动画顺序连接的同时,通过小节标题或者字幕衔接过渡,再加入适当的特效与音效,将最终视频从剪辑软件中渲染导出,才算是完成了功能展示视频的制作流程。
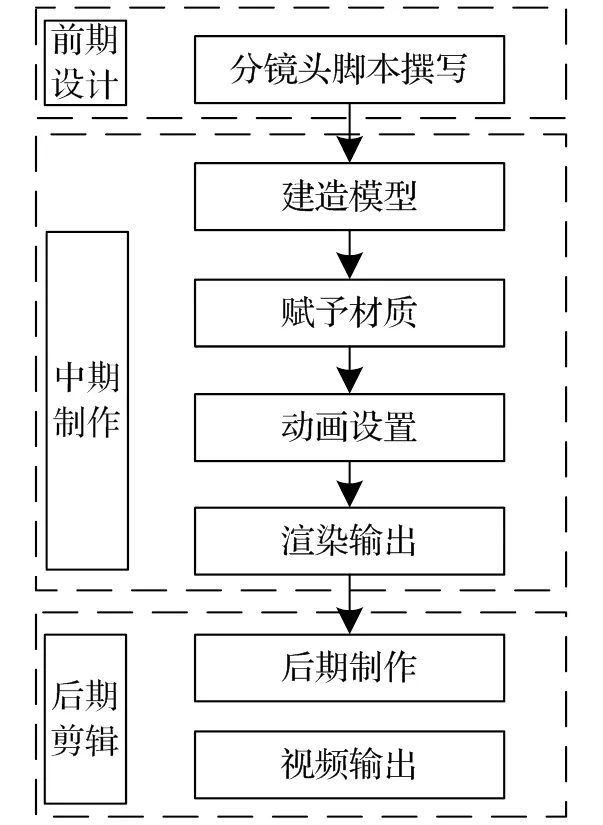
图3 功能展示视频制作流程
本文以特殊领域作战外骨骼机器人作为功能展示视频制作的核心,展示目标是表现出穿戴不同类型外骨骼机器人的士兵在特殊领域作战中发挥的作用,因此重点表现的部分为外骨骼机器人的结构、功能,以及穿戴外骨骼机器人的士兵在战场中的作战情景。
3.2 前期设计
在制作功能展示视频的前期,首先要对展示内容、目标及重点进行分析,根据侧重点逐步撰写出详细的分镜头脚本方案,明确每一段分镜头要表达的对象与内容,同时也要将每段之间的逻辑关系、连接顺序及方式整理出来。脚本也无需像文章那样写成一段一段文字,一般采用表格的形式列出序列号、镜头说明、画面描述、画面示意、画面时长、制作方法及备注等内容。画面示意可以通过手绘草图或者线框图表来简单示意,其目的是清晰地表达出画面所要展现的内容。
本次脚本撰写中,不仅有单独介绍四款外骨骼机器人的外观、结构、功能的部分,还有未来城市作战场景的部分,这一部分采用了故事叙述的方式展现。制作者将故事背景设定在2030年,为争夺某种虚拟资源而展开了一场城市战争,穿戴外骨骼的士兵将前往到这个特殊领域中进行作战。为了制造一个身临其境的观感,在进行战场空间运镜时摆脱了人们习以为常的第三人称视角,而是带入飞行于城市战场中的无人机视角,让观众以第一人称的方式“参与”这场战争。
3.3 建造模型及赋予材质
为确保外骨骼机器人的细节与真实感,在建模时选用1:1的比例,单位选用毫米。还应提前导入人体模型作为参考,以统一各部分的比例及连接方式。为了减少不同软件间转换格式带来的时间浪费、难以修改以及其他未知错误,本次展示视频在中期制作过程均使用CINEMA 4D软件进行操作。
场景设计的含义是三维动画中,除了外骨骼机器人之外其它随时间改变的事物的造型设计。搭建特殊领域作战场景时,因其模型数量多、场景宏大等特点,制作出具有真实感的未来城市作战平台成为了一个很大的挑战。通过从未来科幻片中类似场景的提取,以及对未来城市战场作战特点和故事背景需求的分析,首先要搭建出一个处于战争中的城市模型,将建筑、街道、车辆等物体按照布局排列组合之后,还需要对其模型进行不同程度的损坏处理;然后将炮台、弹药箱、无人车、无人机等装备放置在需要出现的地方,并提前规划好其运动轨迹,预留出相应空间;最后将穿戴外骨骼机器人的士兵放入对应功能区。对于场景中不予重点表现的模型可以降低其面片数并直接复制排列,这样一来既能减少模型运行数据量,也能提高动画制作与渲染输出的效率。
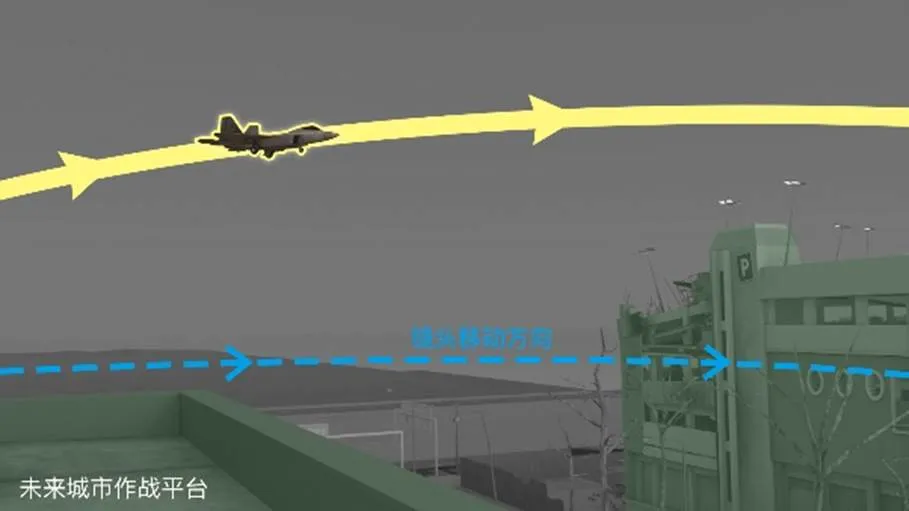
图4 无人机运动轨迹

图5 无人车运动轨迹
完成造型建模之后,要逐个对象进行材质赋予,有些材质还需要单独制作贴图,天空、光线等环境也同样不能被忽略。除了材质,布置合理的灯光也能增加场景的真实感,再加上后期进行适当的特效与音效合成,才真正搭建好具有真实感的未来城市作战平台。
3.4 动画设置
动画设置这一阶段是利用关键帧技术,让原本静止的物体运动起来。在视频中展示的四款外骨骼机器人需要完成不同的动作:下肢外骨骼机器人提供助力,辅助士兵背负重物进行远程行走;膝关节外骨骼机器人能增强士兵在轻载下的机动能力与耐力;腰部外骨骼机器人提供腰部及手部助力,可以增强士兵物资搬运能力与耐力;柔性外骨骼机器人则与其他无人作战系统结合,增强多平台的感知预警以及精准打击能力。在展示不同种类外骨骼机器人时,士兵要在对应的场景完成规定动作,外骨骼机器人与人体间的随动关系成为了动画制作的一大难点。
要让穿戴外骨骼机器人的士兵完成既定动作,需要经历如下步骤:
(1)首先要让士兵动起来,为外骨骼的运动轨迹提供依据。在CINEMA 4D中,通过角色功能为士兵模型创建骨骼系统,并依次按照从父级到子级的关系对各骨骼关节进行多视图调整,使其贴合士兵的各个关节。
(2)骨骼位置调整完成后即可以对士兵模型进行绑定,并在动画选项里调试检查,如果有出现面片的变形或破裂等情况,还需要对骨骼绑定进行刷权重处理,最终调试完成的士兵模型便可以按时间先后顺序进行关键帧设置。
(3)在不同时间节点上士兵会定格在不同姿势,通过对动作的分解来设置关键帧,并在各关键帧之间多加入几个点位进行动作平滑,从而完成士兵的搬举、行进、指挥等动作。
(4)设置完成士兵的关键帧动作之后,将外骨骼机器人按照相应的关键帧修改位置,使其在动作过程中尽可能地贴合人体,反应出机器与人体之间的随动关系。
(5)除了对场景内模型进行动画设置,同样也利用关键帧的方法对摄像机进行动画设置,使其运动轨迹达到脚本预期的第一人称效果。

图6 动画序列截图
3.5 渲染输出
利用CINEMA 4D制作完成的动画,渲染输出格式为PNG格式单帧图片,后续再放入视频制作软件中将图片序列转化为视频格式。渲染成带alpha通道的图片序列并非视频格式,这样做不仅在后期合成时可通过层的方式方便场景叠加,也可防止渲染动画中途遇到软件意外停止运行,下一次渲染需要从头重新开始渲染的情况,而是直接从上次停止帧开始继续渲染。
3.6 后期剪辑
将CINEMA 4D渲染得到的图片序列首先依次导入After Effects中进行拼接,并完成片头、标题及特效场景的制作。利用软件间的兼容性,Ae文件可以直接导入Premiere进一步剪辑,为了增强展示视频的连贯性与视听性,还可以提前搜集一些空镜素材在剪辑时穿插过渡,而后进行画面滤镜调色、字幕、音效及背景音乐添加,最后导出mp4格式的成品视频。

图7 合成视频截图
4 结语
特殊领域作战外骨骼机器人的功能展示视频最终时长为330 s,采用空镜素材约90 s,利用CINEMA 4D软件制作了4款外骨骼机器人及其指定动作,一共渲染了10个动画序列,最终采用图片序列约3000帧。
三维动画技术的运用使得产品介绍形式更加丰富,内容更加生动直观。本文通过探究制作功能展示视频的一般步骤:脚本撰写、建造模型、赋予材质、动画设置、渲染输出、后期制作和视频输出,完成了特殊领域作战外骨骼机器人功能展示视频的制作。后续如何提高制作效率及真实感仍然是一个需要不断探索的过程。
[1]李坦东,王收军,侍才洪,等. 穿戴式外骨骼机器人的研究现状及趋势[J]. 医疗卫生装备,2016,37(9):116-119.
[2]朱冬勇. 基于工业机器人生产线的三维仿真关键技术数据构建研究[J]. 现代信息科技,2019,3(4):173-176.
[3]刘贤梅,黄静,刘晓明. 三维动画技术与三维虚拟技术的研究[J]. 计算机仿真,2004(9):127-130.
[4]罗聆瑗,干静,马磊,等. 复杂机电系统科学想象视频的创作流程探索[J]. 机械,2019,1(46):21-26.
[5]陈曦. 三维动画技术在海洋石油工程中的应用[J]. 石油和化工设备,2018(11):65-67.
[6]邹煜,何晓晖,李峰,等. 仿真技术在工程装备研究中的应用与建议[J]. 机械,2012(S1):1-5,9.
[7]朱宏悦,陈彬,王小东,等. 化工园区三维场景建模研究与实现[J]. 系统仿真学报,2018,30(12):4610-4617.
[8]江山永. 产品三维演示动画制作流程方法研究[D]. 杭州:浙江大学,2016.
[9]柴晶. 产品展示动画设计与应用[D]. 武汉:华中科技大学,2015.
[10]Can Mo. Application of computer virtual simulation technology in 3D animation production[J]. IOP Conference Series: Earth and Environmental Science,2017,94(1): 012003.
Video Production of Function Display of Exoskeleton Robot in Special Field
WANG Mingqi,GAN Jing,ZENG Bo,MING Ziwei
( School of Mechanical Engineering, Sichuan University, Chengdu 610065, China )
By analyzing the expression requirements of different types of exoskeleton robots, focusing on the expression ideas of human, exoskeleton robots, combat system equipment and environmental linkage response, we determined to use and using Cinema 4D, After Effects, Premiere and other software, the specific process of making function display video is proposed: in the early design, write the story script based on the characteristics of exoskeleton robot and future urban combat platform; in the middle phase, build the model and scene of the robot and other equipments according to the script,, complete the corresponding animation settings, and then render and export each animation sequence after debugging and testing; put the rendered sequence into the editing software, and complete the editing according to the audio-visual principle. This paper takes the exoskeleton robot in special field as an example, proposes the production process of function display video, and solves a series of problems which affects the efficiency in the production process.
exoskeleton robo;collaborative system;future urban combat platform;function display;video production
TP391
A
10.3969/j.issn.1006-0316.2021.01.009
1006-0316 (2021) 01-0061-07
2020-06-28
王名祺(1997-),女,四川成都人,硕士研究生,主要研究方向为计算机辅助工业设计,E-mail:wmqq97@163.com;干静(1968-),女,重庆人,博士,教授,主要研究方向为产品创新设计理论、计算机辅助工业设计、机械设计等。
