基于OSPF路由协议思想的虚拟维修诱导技术
2021-03-09孙志丹王海涛谭业发钱坤
孙志丹,王海涛,谭业发,钱坤
基于OSPF路由协议思想的虚拟维修诱导技术
孙志丹,王海涛,谭业发,钱坤
(陆军工程大学,江苏 南京 210007)
提出了一种基于OSPF路由协议思想的虚拟维修诱导技术方法VMIT。首先列出OSPF核心部分与VMIT的对应关系,然后阐述VMIT的基本内涵,包括编制零件或总成层级码,通过零件发出故障信号以诊断故障零件,利用小波神经网络预测维修时间,采取改进的Dijkstra算法求解和评价更换零件最优路径。最后以更换离合器油封为例,阐述虚拟维修的四个阶段,分别为给油封及周边零件编制层级码,根据故障信号查找故障零件,利用小波神经网络预测拆装油封及周边零件的时间,获取拆除油封的最优路径。案例的四个阶段与VMIT的四个基本内涵相呼应,同时也进一步证明了VMIT的可行性。
OSPF路由协议;虚拟维修诱导;小波神经网络;Dijkstra算法
虚拟维修是以计算机技术、虚拟现实、增强现实等技术为依托,模拟维修人员在虚拟环境中对故障对象开展维修工作,包括故障诊断、虚拟拆装、更换零件、考核评价等内容[1]。但是,虚拟场景不同于真实环境,需要解决碰撞检测、拆卸顺序、装配配合、交互式控制等诸多关键技术[2]。
开放式最优路径优先(Open Shortest Path First,OSPF)是一个计算机网络内部的网关协议(Interior Gateway Protocol,IGP),用于在单一自治系统(Autonomous System,AS)内决策路由。OSPF协议主要包括如下几个部分:确定各路由器ID(唯一性编号)、链路状态、区域划分、区域自治、链路状态通告、最优路经优先(Shortest Path First,SPF)算法。
本文提出一种基于OSPF路由协议思想的虚拟维修诱导技术(Virtual Maintenance Induction Technology Based on OSPF Routing Protocol,VMIT),实现对虚拟维修过程的诱导,包括确保每个零件的唯一性;快速定位故障源;预测拆装零件的时间,并能评价拆装效率;获取最佳拆装路径和效率,还可对路径进行评价[3]。采用VMIT技术进行虚拟维修的过程中,预测结果既可以在维修时智能提示,也可以隐藏,并作为评价依据。OSPF的核心要素和VMIT的基本内涵关联如表1所示。

表1 OSPF术语与VMIT对应关系
表1是OSPF思想与VMIT对应关系,第5项可以看成是整体与局部的关系,即待维修区域可大可小,类比到车辆中,该区域可以大到整台汽车,也可以小到变速箱,或更小的摩擦离合器。因此,VMIT的核心要素在于前4项,本文主要对前4项展开论述。
1 VMIT基本内涵
1.1 编制层级码
VMIT编制层级码就是将目标机械以一个规范的顺序进行编号,编号的规则为:
(1)每一级编号均为两位数,不足两位前面补0。
(2)唯一根节点为第一层,规定为00,其下一层为第二层,分别01、02开始,最大为09,即,第二层最多包括9个节点。
(3)第三层依然为2位数,具体为:01节点下编号从11到19;02节点下编号从21至29,依次类推。
(4)第四层为四位数,其中11节点下编号从1111到1199。
根据上述规则,第一层仅一个编号,第二层最多9个编号,第三层最多81个编号,且前三层均为两位数。这样,一方面减少了层级码位数,同时也限制一级总成的大小,避免一开始就将待维修目标对象划得过细。目标对象可表示为:

式中:为待维修目标对象;H为对象一级总成;1j为二级总成,还可以进一步细化。
任意一个待维修目标对象既可以看成是零件总成,也可以看成是层级码的集合,即:

由于零件和层级码具有对应关系,因此,任意零件或总成又可以表示为:

通过层级码,不仅可以将每个零件或总成进行编码,形成表1的唯一ID;同时,层级码还暗含上下级层次关系,便于快速查找和定位各种零件属性。
1.2 VMIT故障定位诊断法
OSPF以链路通告的方式对外发布状态信息,VMIT采用类似方式对故障零件进行诊断。具体方法为:
(1)利用Unity 3D引擎构建桌面型虚拟维修训练系统[4-5],通过鼠标和浏览器模拟操作;或者建立与实物一致的1:1虚拟模型,然后利用HTC头盔、Microsoft HoloLens头显进行模拟训练操作[6]。
(2)用户进入故障分析与判断模块后,运转虚拟模型,起动故障并发出信号(相当于打开OSPF的链路通告)。
(3)用户根据模型运转情况,仔细观察各零件和总成的工作状况,一旦发现声音、颜色、位置变化等异常现象,就迅速定位到故障源。根据故障现象的不同,定位方法可以分为直接定位法和逐级定位法。直接定位法就是依赖于故障源准确模拟和用户的丰富经验;逐级定位法就是从大到小依次循环故障源,此种效率较为低下,故障定位的快慢也是评价训练的一个重要依据。
1.3 WNN预测拆装时间
1.3.1 神经网络

图1 典型的3层神经网络结构
图1包含输入层、隐含层、输出层,分别包含、、个节点。第个输入节点与第个隐含节点的连接权值为w;第个隐含节点与第个输出节点的连接权值为w;隐含节点和输出节点阈值均为。神经网络训练的过程就是不断修改权重值w和w,使得实际向量和期望输出向量之间的值小于阈值。
虚拟维修的时间预测就是将前期维修的历史数据放至输入层,通过设定阈值,调整权重,预测即将开始的拆装时间。虽然神经网络得到很大的发展,但也存在如下不足:①激活函数不满足框架条件;②神经网络的隐含层数目难以确定;③容易陷入局部极小值[9]。这样,会导致不能正确预测拆装时间。张国印[10]、陈英[11]等人探索了在神经网络中引入小波变换形成小波神经网络的可行性。
1.3.2 小波变换
小波的概念是由法国工程师J.Morlet在1974年首先提出,经过Y.Meyer、S.Mallat、I.Daubechies等人的推动,已经得到迅速的发展,它同时具有理论深刻和应用十分广泛的双重意义[12]。
定义1 设()为一平方可积函数,即() ∈2(),若其傅里叶变换()满足条件:
则()为一个基本小波,式(5)为小波函数的可容许性条件。将基本小波()进行伸缩或平移,设伸缩因子(尺度因子)为,平移因子为,伸缩平移后的函数为Ψ,b(),则:
式中:Ψ,b()为依赖于参数,的小波基函数,其中∈,∈且≠0。
1.3.3 小波神经网络
按0.01 mm/min的位移速度施加轴向应力,直至相似试件充分破坏,如图1所示,记录应力-应变曲线和试验力-变形曲线,对相似试件单轴压缩曲线进行分析。
将小波变换与神经网络相结合,充分发挥二者的优点,目前得到广泛的研究。典型的小波神经网络结构有三种[13]:
(1)利用小波函数来代替Sigmoid,类似于多层认知(Multilayer Perceptions,MLP),此种结构被称为MLP-WNN,其公式为:


(2)利用尺度函数为神经元,类似于RBF(Radial Basis Function),此种结构被称为RBF-WNN,其公式为:

式中:c为相应尺度函数对应的小波系数;φ,k()为某尺度对应的尺度函数。
(3)综合运用小波和尺度函数,充分利用两种函数的优点,具有分层、多分辨和局部学习的特点,此种结构称为多分辨小波神经网络(Multiresolution wave-net,MRA-WNN),其公式为:

对于MRA-WAN,在最低分辨率下,沿输入的每一维有两个采样点,对于一维函数,隐含层中有2个单元,经学习后所得权系数采用如下逼近形式:
其中=2,1()是()对最粗逼近,若要提高逼近精度,可加入小波基函数,即加入细节,得到f-1(),如下所示:

上述三种小波神经网络优化了传统神经网络,其目的在于训练历史拆装数据,进而预测即将开始的拆装所需时间,该时间既可以指导用户拆装过程,也可以作为考核用户的依据。
1.4 VMIT最优路径算法
如同OSPF一样,VMIT也采用Dijkstra算法。但是经典的Dijkstra算法没有考虑交叉点耗费时间情况,本文提出的VMIT算法采用如下方式寻找最优路径:
(1)通过小波神经网络训练,预测拆卸各种零件(或总成)以及取还工具所需的时间;
(2)将拆卸各种零件类比为OSPF路由协议中传播时延;
(3)将取还工具所需的时间类比为路由器的发送、排队和处理时延;
(4)利用Dijkstra算法,并考虑取还工具所需的时间,寻找最优路径;
(5)根据最优路径,提醒或评价受训者的虚拟维修过程。
通过计算最优路径,不仅可以诱导用户的训练过程,也可以成为评价手段。
2 VMIT虚拟维修诱导实例
本节以某型车辆行驶无力为例,阐述基于VMIT的虚拟维修过程,过程分为4个阶段,分别为给车辆编码、车辆行驶无力故障判断、预测拆装时间、获取更换零件的最优路径。
2.1 利用VMIT为车辆编码
通过本文的VMIT编码规则,将车辆的主要部件进行编码,编制结果如图2所示。

图2 变速箱模型分解示例图
图2中,将车辆本身编为00,其下一级主要构成从01、02开始,而后再逐级划分。如油封的编码为121313,第一组数字12表示其隶属于变速机构,其中的1表示其隶属于变速箱01;第二组数字13表示其隶属于一档摩擦离合器;第三组13表示油封。通过层级码,可以为接下来的拆装和更换零件打下基础。
2.2 车辆行驶无力故障判断
车辆行驶无力的原因较多,包括油品质量差、气缸工作不良、离合器摩擦片磨损严重、离合器油封漏油、车轮阻力大等,其中油封损坏是较为常见的故障[14]。
用户进入训练后,启动故障现象模拟,然后按照从易到难、从外到内的原则,迅速查看和判断车轮、油品、离合器、气缸活塞等周边情况,当发现离合器油封的颜色、形状异常时,进而判断行驶无力的故障原因之一。
2.3 基于VMIT的拆装时间预测
更换油封的前提是对其周边零件进行拆装,在虚拟环境中,需要对拆装时间进行预测,以提示和评价拆装效果。采用小波神经网络学习,预测虚拟维修过程中各个零件(总成)拆装和工具更换时间,主要分为如下几个步骤:
(1)确定初始权值
初始权值根据神经网络模型特点选为(0,0.6)间的均匀随机数;学习步长为0.001,最大平均误差均值长为0.02。当实际平方误差均值小于时学习结束,这时可对维修时间进行预测。
(2)确定学习样本
为了对虚拟维修的拆装时间进行预测,采用如下样本进行训练,如表2所示。表2中,对壳体、单向离合器、一档行星架总成等每一个部件都要进行学习和训练,从而得到拆卸总成的时间,其中“历史均值”指拆卸这些总成的历史记录均值,“前次占比”主要考虑的是本次受训人在拆卸此总成的前一个总成所花时间与历史记录的比值,这两个因素的权重较高。
为了对虚拟维修的切换工具时间进行预测,本文采用如下样本进行训练,如表3所示。

表2 拆装时间预测样本

表3 取工具和放回工具箱时间预测样本
表3中,“历史均值”和“前次占比”依然权重较高,“工具组装次数”可以为0,表示该工具直接使用。
3 仿真结果与分析
通过Matlab进行仿真计算,可以得到学习训练的收敛情况,如图3所示。

图3 采用小波神经网络训练100次和10000次后目标序列和实际输出序列
图3(a)是在训练100次后目标序列和实际输出结果,可以看出,MLP-WAN和RBF-WAN训练效果较差;达到10000次后,如图3(b),三者基本能达到目标。经过图中分析和对比,可以得到如下结论:
(1)MLP-WAN与BP训练算法并无太大差异,容易陷入局部最优状态,所以训练次数可能达到万次。
(2)RBF-WAN在事先确定的尺度因子不合适时,要重复训练整个过程,对于剧烈变化情况时,网络逼近效果较差。尤其是维修结束时,归还工具时间较长,导致目标数据变化较大,从而使得该算法精确度较差。
(3)MRA-WAN结构清晰和严格,具有良好的自适应性,它先从较大尺度上逼近总体趋势,然后根据系统的波动程度逐步细化,提高了预测速度。同时,经过对比,可以发现此算法比前两者的精度稍高。
4 基于VMIT的最优路径选择
虚拟环境下,拆装和更换零件时,必须要考虑到虚拟物体之间的碰撞、拆装先后顺序、配合度是否合理等多种因素,因此,选择合适的路径显得尤为重要。更换一档摩擦离合器油封的拆装顺序可能有多条路径,VMIT思想在于获取其中的最优路径。
为便于绘图和描述,将图2的层级码和名称均以编号表示,编号结果如表4所示。
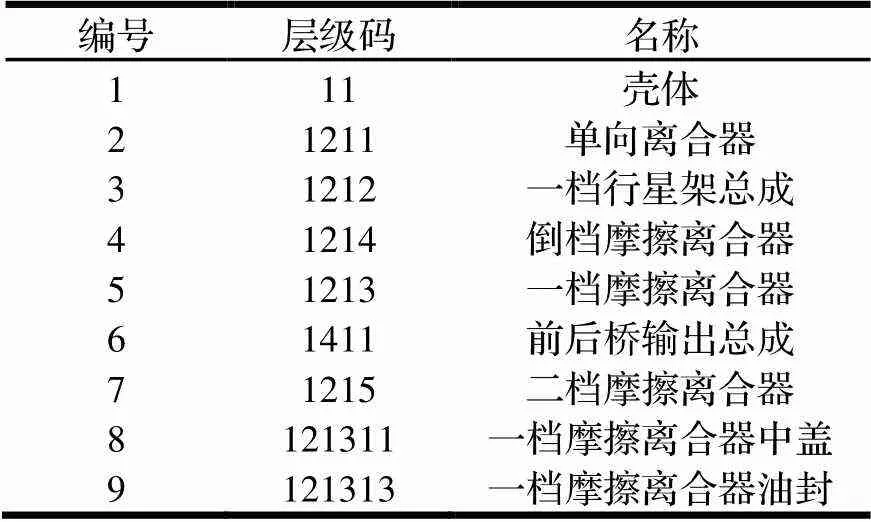
表4 更换油封的部分零件(总成)涉及的编号及名称
根据表4的编号和名称,假设更换油封可以采用多个路径,路径方向以箭头表示,各路径关系如图4(a)所示。
图4(a)中,从拆卸壳体1到一档摩擦离合器油封9可以包括1-2-4-3-5-8-9、1-6-7-5-8-9等多条路径。为了寻找最优路径,需要得到各点之间的拆装所需时间(OSPF的链路状态),为了说明方便,对上述小波神经网络的数据适当修改,设定更换工具时间均为4(OSPF路由器综合时延均为4),其余时间如图4(b)所示。本文的算法如图5所示。
首先获取各零件拆卸的历史时间均值(各节点之间传播时延),如表5所示,然后找出离1点(起始点)最近的点2,再由2点为起始点找出最近点3。此时需要进行循环判断,判断1点经过2点到3点之间的总距离是否小于直接由1点到3点的距离,如果小于,就以1-2-3为最佳路径;否则舍弃2点,以1-3为最佳路径,此处1-2-3的时间再加上经过节点2的时间,总时间为12,正好与1到3的距离相等,所以应该以1-3为最佳路径。后面继续循环直至完成所有点的验证。因此,本实例的最佳路径为1-3-7-5-8-9。

图4 更换油封路径图
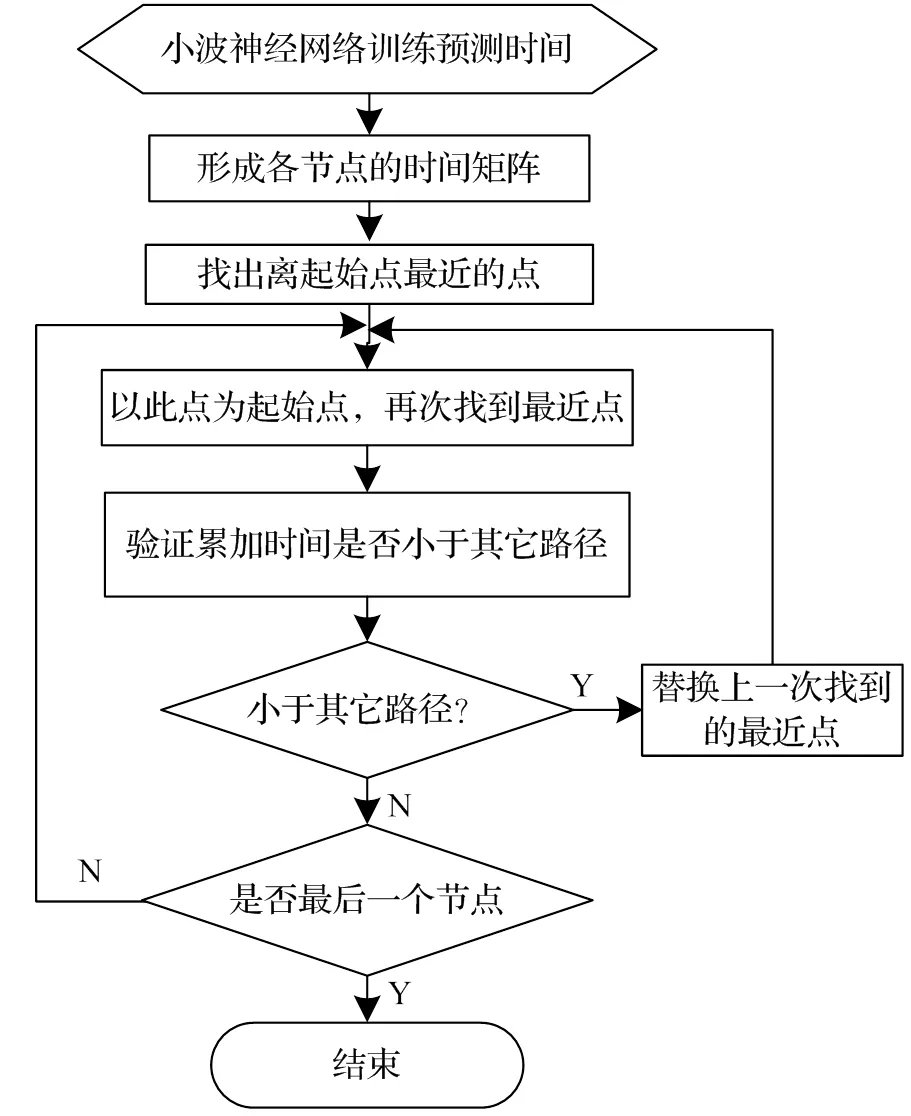
图5 VMIT最优路径流程图
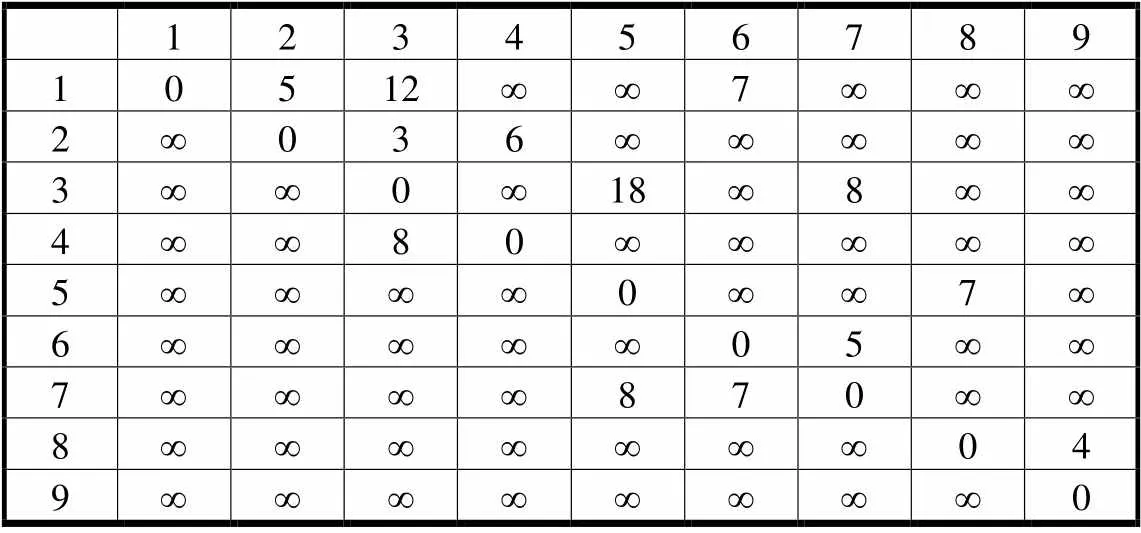
表5 VMIT各节点起始时间传播时延
5 结语
OSPF是计算机网络中广泛应用的路由选择协议,其思想可以被借鉴和应用。本文以此协议算法为参考,提出建立虚拟维修路由方法,主要通过建立虚拟零件的层级码、故障判断与定位、小波神经网络预测拆卸时间、获取最佳路径等手段实现。此外,OSPF的区域划分可以看成是某个子零件总成(如离合器)二次划分,自治系统可以类比于在总成内部实现神经网络自适应学习功能。借鉴和使用计算机网络中成熟的协议思想,可以为多种领域的应用和发展提供思路和帮助。
[1]赵鸿飞,张琦,王海涛,等. 桌面式工程机械虚拟维修训练系统技术研究[J]. 中国工程机械学报,2013,11(5):457-462.
[2]刘跃进,公丕平,冯柯. 工程装备虚拟训练系统关键技术研究[J]. 机械,2012,39(12):15-17.
[3]刘佳,刘毅. 虚拟维修诱导技术发展综述[J]. 计算机辅助设计与图形学学报,2009,21(11):1520-1534.
[4]何俊,公丕平,申金星. 某型火箭布雷车虚拟维修训练系统的设计[J]. 机械管理开发,2020,35(4):166-169.
[5]魏士松,周正东,章栩苓,等. 基于桌面虚拟现实技术的航天器虚拟维修训练系统[J/OL]. 系统仿真学报:1-7[2020-08-06].http://kns.cnki.net/kcms/detail/11.3092.V.20200803.1715.002.html.
[6]林蓝,姜良奎,付建林,等. 基于OSG虚拟现实的转向架车间布局规划[J]. 机械,2020,47(1):9-14.
[7]张亮,王端民,周友运. 基于BP神经网络的装备使用维修费用预测[J]. 装备指挥技术学院学报,2005(04):46-48.
[8] Shaoping Xu, Zhenyu Lin, Guizhen Zhang, et al. A fast yet reliable noise level estimation algorithm using shallow CNN-based noise separator and BP network[J]. Signal Image and Video Processing. 2019(14):1-8.
[9]徐营利,王展,胡晓兵,等. 基于径向基神经网络的刀具寿命预测模型研究[J]. 机械,2019,46(2):13-16,29.
[10]张国印,王志章,林承焰,等. 基于小波变换和卷积神经网络的地震储层预测方法及应用[J]. 中国石油大学学报(自然科学版),2020,44(4):83-93.
[11]陈英,董思羽. 基于可信度小波神经网络的多传感器数据融合方法[J]. 吉林大学学报(理学版),2020,58(4):953-959.
[12]Lu Shuping. The Research on Wavelet Network Prediction Model and its Application in Stock Market Forecasting[D]. Harbin:Harbin Engineering University. 2004.
[13]Bakshi R B,Stephanopoulos G. Wave-net: A multiresolusion, hierarchical neural network with localized learning[J]. AichE Journal,1993(1):57-81
[14]乔磊. 油封在实际应用中的几点注意事项[J]. 机械,2008,35(S1):34.
Virtual Maintenance Guidance Technology Based on the Idea of OSPF Routing Protocol
SUN Zhidan,WANG Haitao,TAN Yefa,QIAN Kun
(Army Engineering University, Nanjing 210007, China)
A virtual maintenance guidance technology method VMIT based on the idea of OSPF routing protocol is proposed. First, the corresponding relationship between OSPF core parts and VMIT is listed, and then the basic connotation of VMIT is stated, including programming parts or assembly level codes, sending fault signals through parts to diagnose faulty parts, using wavelet neural network to predict repair time, and adopting improved Dijkstra algorithm to solve and evaluate the optimal path of replacement parts. Finally, taking the replacement of the clutch oil seal as an example, the four stages of virtual maintenance are explained. They are to compile hierarchical codes for the oil seal and surrounding parts, find the faulty parts according to the fault source, and use wavelet neural network to predict the removal time to install the oil seal and surrounding parts, therefore to get the best solution to remove the oil seal. The four stages of the case correspond to the four basic connotations of VMIT, which proves the feasibility of VMIT.
OSPF routing protocol;virtual maintenance guidance;wavelet neural network;Dijkstra algorithm
TP183
A
10.3969/j.issn.1006-0316.2021.01.004
1006-0316 (2021) 01-0022-08
2020-07-31
孙志丹(1978-),男,江苏洪泽人,硕士研究生,讲师,主要研究方向为工程机械运用、保障和虚拟仿真等,E-mail:952160378@qq.com。
