海洋地震拖缆拉力采集电路研究
2021-03-08马晓伟黄龙君胡勇于强
马晓伟 黄龙君 胡勇 于强
(中海油田服务股份有限公司 天津市 300451)
1 引言
拖缆在水下进行地震数据采集作业过程中,由于拖缆自身重量、长度和在水中的阻力等因素,拖拽受力比较大[1-2],6KM二维采集作业情况下,拖缆受力约在10KN~15KN之间。拖缆受力大小能够间接反映出拖缆在水下的姿态,分析拖缆可能出现的问题,如挂渔网、断裂等,当拖缆出现挂网或被其他物体缠绕时,不仅影响地震数据采集增大噪声,严重时拖缆断裂。
拉力采集电路能够实时监测拖缆受力情况,面对以上问题可以及时作出相应对策,减小不必要的损失。拉力采集段由拉力采集电路和拉力传感器构成,本课题基于自主研制拖缆地震采集系统,设计研发一套拉力采集电路,研究分析拉力采集电路和传感器的线性关系,并对拉力采集电路和传感器进行标定,实现拉力数据实时采集[3]。
2 拉力采集电路及传感器
拉力采集电路实时的将拉力传感器输出的电压信号经过放大、模数转换成十六进制数码传输给拉力段,然后由水上系统解析得到相应的拉力值信息[4]。图1为拉力采集电路结构图,拉力传感器感受到拖缆外界拉力后,将拉力信号转换成微弱电平信号传输给拉力采集电路,电路对微弱电平进行放大和模数转换生成一个16bit的数据流,之后传输到数字包传输板,传输板对数据进行封装同地震数据一起传送到水上系统进行解析,水上室内系统经过解析之后将拉力值实时显示在工作站界面上。

图1:拉力采集电路结构
采集电路放大器采用的是由仪表放大器和同相比例放大器共同组成的二级放大结构,采集电路输入差模信号经过仪表放大器放大128倍,传递给同相比例放大器再进行6.5倍放大,最终实现拉力采集电路815倍信号放大[5]。
3 拉力采集电路标定
3.1 传感器线性分析
基于自主拖缆地震采集系统,模拟拖缆工作段在采集作业过程中的受力情况,给传感器施加拉力,测试传感器在不同拉力值下,输出差模信号与拉力值的线性关系,其中拉力间隔为5KN,表1为不同拉力值对应的拉力传感器输出信号值。由表1可以看出,拉力传感器的输入拉力值与输出信号值具有很好的线性关系,因此每间隔5kN取一个拉力值进行测试标定符合实际情况。

表1:拉力传感器输出信号
3.2 拉力采集电路标定
拉力采集电路标定的原理为:在不同拉力值下,拉力传感器输出差模信号值即拉力采集电路输入信号,经过放大、ADC模数转换之后,分析比较不同拉力采集电路之间的一致性[6]。针对同一传感器,选取2块拉力采集电路对其进行标定。传感器序列号为5006,将拉力采集电路分别命名为T1、T2,标定时,拉力值范围为5KN~40KN,每间隔5KN测试传感器输出和拉力采集电路输出值,其中拉力值误差小于10N。表2为测得T1、T2拉力采集电路对应同一拉力传感器差模信号输出值与ADC输出信号值。
由表2可以看出在相同拉力值情况下,拉力传感器输出的差模信号基本一致,经过拉力采集电路两级放大之后,T1与T2的ADC输出信号绝对差值小于25mv,最大误差率为0.5%左右,误差较小;经计算可得T1拉力采集电路放大倍数为808倍,T2拉力采集电路放大倍数为815倍,两块拉力采集电路放大倍数比较接近于,误差处于允许接收范围之内,分析可得,经过标定之后拉力采集电路的一致性比较好。
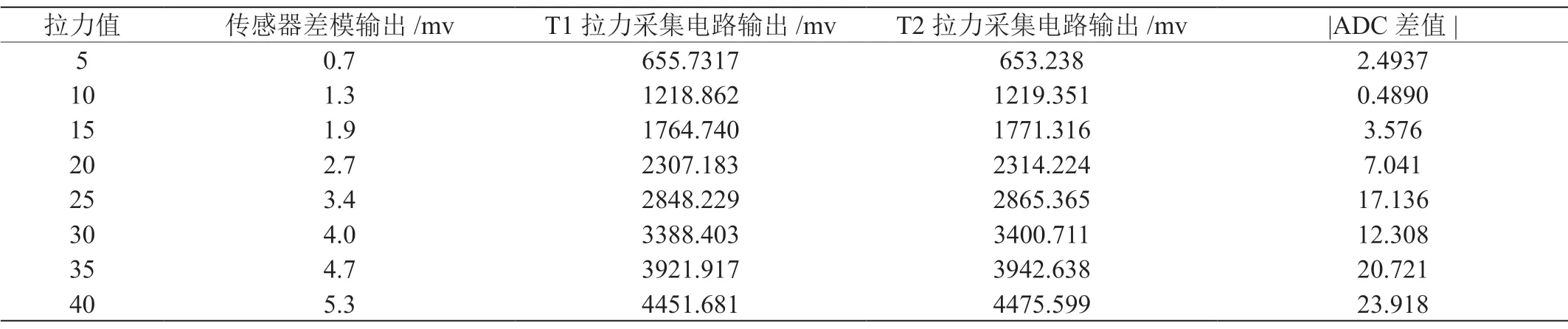
表2:T1,T2拉力传感器差模信号输出与拉力采集电路输出值
3.3 一致性分析
通过3.1对拉力采集电路标定我们可以看出对于同一拉力传感器,不同拉采集版的一致性比较好,误差在可接受的范围之内,满足海上勘探作业过程中拉力采集需求。下面我对同一拉力采集电路不同传感器之间的一致性进行分析。选取拉力采集电路命名为T3,传感器型号为5005和5006,拉力值范围为5KN~40KN,每间隔5KN测试传感器输出和拉力采集电路输出值,其中拉力值误差小于10N。表3为拉力传感器对应的拉力采集电路的ADC输出值,图2为拉力传感器5005、5006差模信号输出与拉力采集电路ADC输出关系,其中y1为5005拟合曲线关系,y2为5006拟合曲线关系。
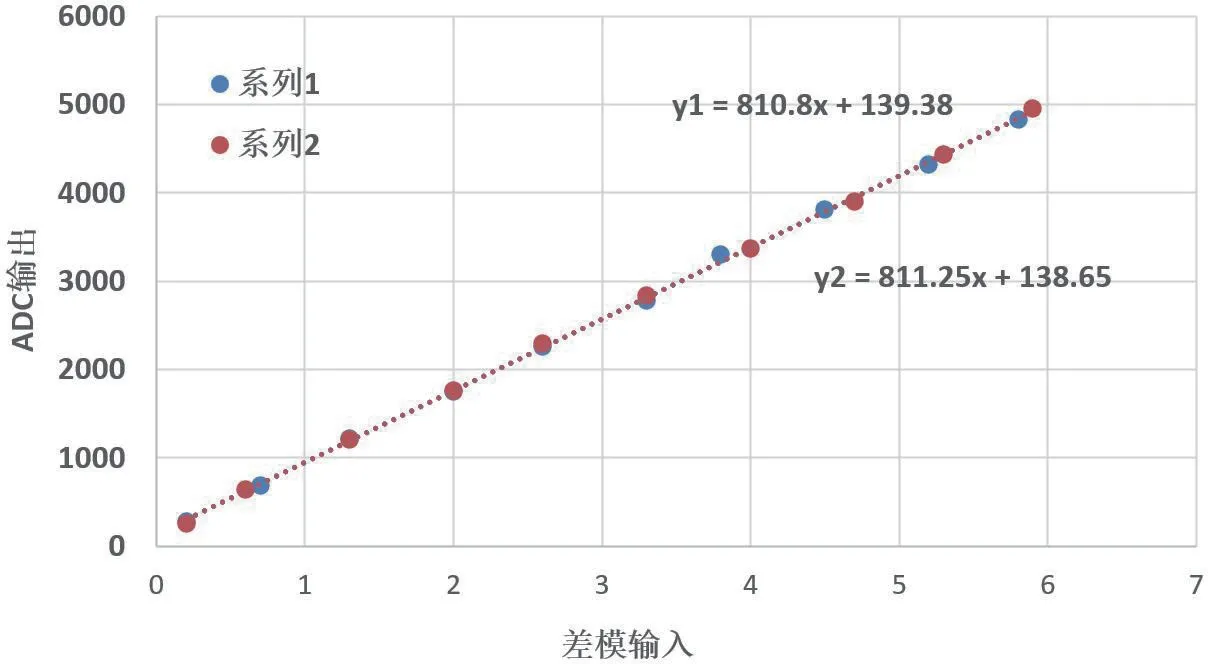
图2:差模输入与ADC输出关系

表3:不同传感器对应ADC输出
由表3可以看出,在相同拉力值情况下,传感器5005和5006差模输出值基本相同,误差很小,经过拉力采集电路放大、模数转换之后,ADC最大输出值误差在2.5%左右;图2显示差模输出信号经过拉力采集电路放大、拟合之后的线性关系基本一致,说明5005和5006拉力传感器的一致性比较好,特别是在10KN~25KN范围内曲线基本重合,满足自主拖缆地震采集系统海上作业时受力需求。
4 结束语
本文基于自主拖缆地震采集系统,设计研究一套拉力采集电路,对拖缆受力情况进行实时监控,模拟拖缆工作段作业过程中受力情况,对拉力采集电路和拉力传感器进行试验标定,同时对同一拉力传感器不同拉力采集电路,以及不同传感器同一拉力采集电路的一致性进行分析。结果显示标定后的拉力采集电路一致性很好,满足拉力采集电路设计要求,能够实时监测拖缆受力情况,误差在可允许接受的范围之内;同一拉力传感器输入与输出线性关系,以及不同传感器之间一致性效果比较好。由此可见标定后的拉力采集电路与传感器能够准确的实时监测拖缆受力情况,基本能够满足拖缆采集系统海上作业需求。
