自适应平方根球型卡尔曼滤波下的SOC估计
2021-03-07叶望博张雪霞
刘 楠,叶望博,李 明,吕 甜,张雪霞
(1.中车唐山机车车辆有限公司,河北唐山063000;2.西南交通大学唐山研究生院,河北唐山063000)
锂电池荷电状态(SOC)的估算对于电池管理系统而言,是至关重要的一环。电池的SOC 代表锂电池当前剩余容量。在有轨电车运行过程中,锂电池作为一种电动机供能装置,具有很高的能量密度,并且锂电池的当前状态与有轨电车的运行方式密切相关。因此,对锂电池的SOC 进行估算,能较好地反映锂电池当前剩余容量,从而预测有轨电车的运行状态。
当前对锂电池SOC 估算的方法主要包括安时积分法,开路电压法,卡尔曼滤波法(KF)以及人工神经网络法,深度学习等等[1-4]。其中安时积分法较为依靠SOC 初值的准确性,以及电流测量的精度,容易产生累计误差。而开路电压法,其开路电压的获取方法需静置电池较长时间,无法实时获取。人工神经网络法则要求庞大的关于锂电池SOC 的数据,包含各种状况下SOC 的变化状况,因此不太实用。针对锂电池这种非线性系统而言,无迹卡尔曼滤波方法[5]常被用于锂电池SOC 的估算,其计算速度以及精度均能达到较好的效果。
本文以2.7 V/20 Ah 的钛酸锂电池作为研究对象,通过实验及仿真验证,并分析其工作特性,最终建立了一阶Thenevin等效模型。此模型的计算量较少,且精度较高,能够很好地反映锂电池的工作特性。利用MATLAB 对等效模型的各个元件参数进行辨识。最后,针对标准UT 变换中设定参数较多且难以确定,以及因噪声统计特性未知而造成估算精度下降的两个问题,本文提出了在传统平方根无迹卡尔曼滤波方法下做球形变换,加入噪声自适应因子[6-8]的估算方法,对锂电池SOC 进行估算,提升了其估算的准确性和鲁棒性,使估算的误差不超过1%。
1 锂电池等效模型及参数辨识
1.1 等效模型
为模拟电池充放电特性,需对锂电池进行等效电路建模。通过不断地测试仿真,考虑到SOC 估算的准确性及计算量,本文采用一阶Thenevin 电路模型[9]作为钛酸锂电池的等效模型。此模型由三个部分组成:(1)电压源Uoc;(2)欧姆内阻R0;(3)极化内阻Rp和极化电容Cp组成的并联部分,见图1。

图1 一阶Thenevin模型
图1 中,极化部分可模拟锂电池的极化效应,而在充放电时,电压骤变过程的瞬态反应可由R0表示。通过基尔霍夫定律,得该模型电路方程式:

式中:UL为电池端电压;I 为总电流,以电池放电方向为正;Up为极化模块两端电压。
利用安时积分法,可得锂电池SOC 计算式:

式中:η 为库仑效率;Qa为锂电池标称容量。
1.2 参数辨识
锂电池等效模型的参数辨识主要包括4 个部分:开路电压Uoc,欧姆内阻R0,极化内阻Rp以及极化电容Cp。辨识的步骤为,将锂电池SOC 从100%到0%分成20 等份,每隔5%,均对锂电池进行一次HPPC 循环脉冲实验[10],从而获得锂电池电压变化曲线,如图2。通过式(3)~(7)可辨识出不同SOC 值下的参数值。

图2 HPPC实验曲线图
锂电池在静置一段时间后,电压值会逐渐趋于稳定状态,此时电压即电池的开路电压值。因此,根据不同SOC 状态下所得到开路电压值,利用多项式拟合,可得OCV-SOC 之间的关系见式(3):



极化模块的辨识方法,则可根据电池在静置时间段内,所发生零状态响应得出:

通过MATLAB 中cftool 工具箱,利用最小二乘法,输入每个SOC 点所对应的Ut,Uoc,It,R0值,可得到对应的极化内阻Rp以及时间常数τ 的值。最后,与开路电压拟合方法一样,利用多项式拟合,将R0,Rp,Cp均拟合成关于SOC 的7 次多项式,见式(6)~(7):

式中:内阻均为mΩ级,极化电容为kF 级。
1.3 模型验证
利用等效电路模型以及参数辨识的结果,在MATLAB/Simulink 软件中搭建一阶仿真电路。选取脉冲充放电测试实验验证模型的可行性。
以脉冲充放电实验为例,以3 C 倍率对电池放电10 s,静置40 s,然后以3 C 倍率充电10 s,静置40 s,再以1 C 倍率放电3 min,直至放电到截止电压,其仿真电压曲线与实验电压曲线进行对比,见图3(a)。从图中可看出仿真端电压与实际端电压的区别很小,可以反映出电池在工作时电压的变化情况。由图3(b)误差曲线可知,前中期模型仿真效果最好。随着容量逐渐减少,即在后期时,其模型仿真值与实际值的差别较大,但最大误差仍未超过0.15 V,误差较小。因此表明,一阶RC 模型满足要求,为SOC 的估算提供了基础。

图3 脉冲充放电下电压对比图
2 锂电池SOC 的估计算法
2.1 平方根无迹卡尔曼滤波算法(SRUKF)
SRUKF 是在传统UKF 的基础上,运用协方差矩阵的平方根取缔原有的协方差矩阵参与到迭代的过程,通过QR 分解以及Cholesky 一阶更新获取协方差平方根,保证协方差矩阵的半正定性,并且此举能够提高其算法的精度。
SRUKF 的具体步骤如下:
(1)对状态变量的均值xˉ0和协方差矩阵平方根S0进行初始化操作:

(2)对k-1 时刻的状态变量进行sigma 化:
Sigma 化即将一个n 维的状态变量,利用对称采样取点的方法,得到2n+1 个与初始状态变量相同的统计特性。并且每个Sigma 点具有不同的权重系数,其权重值计算方法如下:
式中:λ 为缩放尺度因子,λ=α2(n+k)-n;n 为维数;α 为sigma 点以均值xˉ0为中心所分布的范围大小,一般取范围在10-6~1 之间的值;β 能够减小高次项所造成的影响,一般取β=2;k 即辅助尺度参数,一般k+n≠0。适度改变α 以及k 的值可以提高估算的准确性。
(3)时间更新
利用xk-1与uk的值,利用状态方程式对xk进行预测,首先对sigma 点进行更新,得:


依照sigma 点的预测对状态变量的误差协方差矩阵采取QR 分解,并利用Cholesky 分解保证误差协方差矩阵的半正定性,从而消除由α 或k 的取值差异所导致权值系数出现负值的情况。Sx,k表征状态变量协方差矩阵的平方根,其k 时刻具体更新方程如式(13):

(4)量测更新

(5)状态更新
卡尔曼增益的精确性会直接影响SOC 的估算准确度,而影响卡尔曼增益的因素主要是状态变量和观测量的互协方差,其计算方法为:
式中:Kk为卡尔曼增益;yk为k 时刻下所测得的端电压值;Sk即误差协方差的平方根。

2.2 球形UT 变换
在上述SRUKF 算法中,其UT 变换的权值计算包含过多需要设定的参数,例如α,β,k等。并且其参数的设定对最后估算结果会产生较大的影响,所以,在调整参数的环节,需要根据经验进行不断的尝试后,才有可能获得更好的结果。而这个调节的步骤一般较为复杂,为避免调整参数过程的繁复性,故选择球型UT 变换方法。球型UT 变换可将sigma 点从2n+1个点降至为n+2个点,从而减小了计算量。具体步骤如下:
(1)确定权值系数:

式中:ωi既表示状态变量均值的权值系数,也表示协方差矩阵的权值系数,且ω0通常取0。
(2)sigma 化:

若j=2,3,4,…,n 时,对ξ(1)
i 则可知:
利用球形UT 变换则可替代传统SRUKF 中sigma 点的选取方式,简化计算量。
2.3 噪声自适应
在实际的工作状态中,无论在计算过程或是测量过程都会带来难以估计的噪声,并且这些噪声的实际分布极难获取。因此,在一般的操作过程都会将噪声的协方差矩阵设置为一定值,方便计算。但是,若取得的协方差矩阵不准确,则会导致精度问题,严重时会使迭代发散。对此,本文引入自适应因子,对噪声的协方差自行进行匹配,并不断更新协方差的值。
计算自适应调节因子矩阵Dk如下:

其中:
式中:ek为观测误差,即ek= yk- ŷk|k-1。
在引入自适应调节因子后,则式(17)可改写为:

3 仿真分析
验证平方根球型无迹卡尔曼滤波方法对锂电池SOC 估计的准确性。本文以2.7 V/20 Ah 规格的钛酸锂电池作为研究对象,其截至电压在1.8 V。在标准条件下分别进行不同的工况测试,主要包括恒流充放,HPPC 充放电测试。并通过EKF,传统SRUKF 与ASRUKF 进行仿真结果对比。
首先,为检验算法的鲁棒性,分别设置SOC 初始值为1,0.8 和0.1 三种情况下的算法收敛程度,如图4 所示。在放电初期,由于初始噪声的设定可能与实际噪声差别太大,导致算法的震荡较为严重,但很快趋于稳定,并收敛到可接受的误差范围内。在放电平台区,算法对SOC 的估算基本与实际理论值重合,并一直到放电终止。

图4 SOC初值在不同状态下估算结果图
由图4 可见,当设定的SOC 初始值与真实值较为接近时,收敛的时间较短,其最大估计误差不超过2%,而放电平台区至放电结束,其误差在0.7%左右。这是由于电流较为稳定,对算法干扰较少,因此算法具有很好的效果。且即使SOC 初始值设置偏离实际值,但算法依然能够很快地收敛到真实值附近,并保持稳定的跟随。这说明,该算法具有很好的滤波作用,且具有较强的鲁棒性,对锂电池SOC 估算效果很好。
图5(a)为3 C 恒流放电下,SOC 理论值与EKF,SRUKF,以及ASRUKF 的估计值对比。图5(b)则为误差曲线图。由图5 可知,EKF 的效果最差,误差在5%左右,SRUKF 的效果在后期也逐渐变差,误差在不断增大,最大误差为2.5%。而ASRUKF 方法的估计值最接近理论值,其误差基本维持在1%左右。因此,ASRUKF 的精度较之其余两种方法更佳。
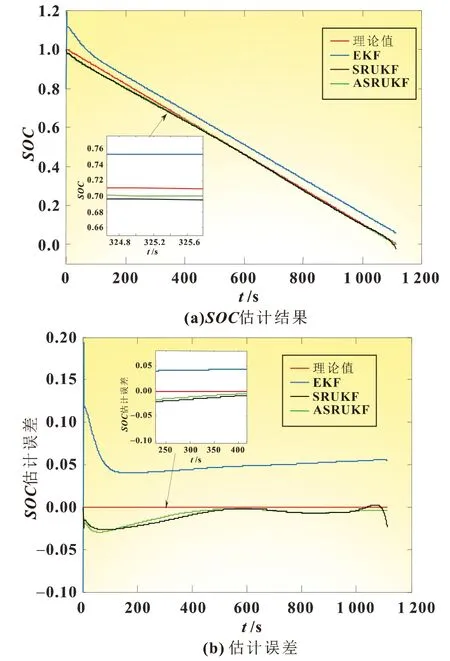
图5 恒流放电下SOC估计结果对比
根据图6 HPPC 测试条件下SOC 估算结果及误差对比,其具体操作流程可见前文参数辨识。由图可见传统SRUKF
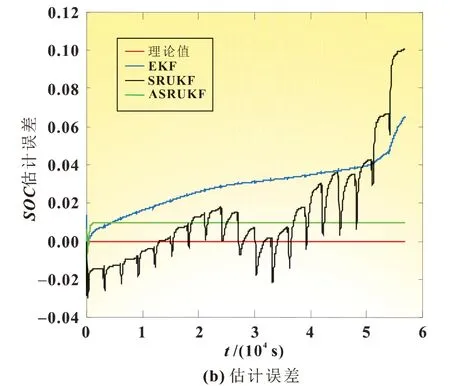
图6 HPPC 测试下SOC估计结果对比
在后期误差明显增大,且波动较为明显,而EKF 虽在后期误差也不断增大,但其波动幅度比SRUKF 算法小。经过自适应处理后的ASRUKF 算法,基本在测试1 000 s 之内,算法趋于稳定状态,误差始终保持在1%之内,算法稳定性很高。
4 结论
通过实验仿真说明,一阶Thenevin 模型能够满足本文所用钛酸锂电池的等效模型要求。并且,自适应平方根球型卡尔曼滤波方法相较于传统的SRUKF 方法而言,添加了自适应因子后,提高了SOC 的估算精度以及鲁棒性,即使在极为复杂的工况下,仍能使其最大误差不超过1%,且收敛速度较快,无论SOC 初始值偏离多少,能够很快收敛到真实值周围,滤波效果不错。
