基于STM32单片机的地震检波器设计与实现
2021-03-07张允中徐成坤周小发金子潇
张允中 徐成坤 周小发 金子潇
(北京信息科技大学 北京市 100101)
1 引言
石油是人类赖以生存的不可再生自然资源,被誉为“工业的血液”,我国对石油能源的需求日益增加,开采石油资源需要获取油气藏的位置、平面分布、储层厚度广度、油气储量等资料[1],地球物理勘探的主要任务之一就是获取这些资料。地球物理勘探方法有地震勘探、重力勘探、磁力勘探、电法勘探等。其中,地震勘探方法是一种重要的勘探方法。地震检波器[2-3]是地质勘探中最重要的地震波传感器 (以下简称检波器) 。按工作原理的不同,检波器可分为压电检波器、感应检波器、激光检波器等。电化学检波器以电解液作为惯性质量,无需位置和中心调整,具有更大的工作倾角,具有自噪声小,动态范围大的优点,但由于制作工艺问题,存在一致性较低,频带窄,工艺复杂等缺点。[4]电磁感应式检波器的原理是电磁线圈切割内部永磁体形成的磁感应线,生成感应电动势,从而反映震动信号。这种传感器价格便宜、有较强的环境适应能力。[5]压电式检波器是以压电传感器为信号检测单元的检波器。它以某些介质的压电效应为基础, 在外力的作用下, 在电介质表面上产生电荷, 其电荷与所受外力成正比, 从而把机械能转化为电能。[6-7]其结构简单,灵敏度和信噪比高。本文以stm32f407单片机作主控制器,结合传感器模块和无线传输模块,设计实现了一款地震检波器。
2 系统总体设计方案
检波器设计如图1所示,传感器对人工震源产生的震动进行检测,stm32单片机对采集到的数据进行滤波、合成。转换后的数据可通过串口通信发送到PC上位机,也可以通过无线通信模块发送到上位机。单片机和无线传输模块由电源供电。
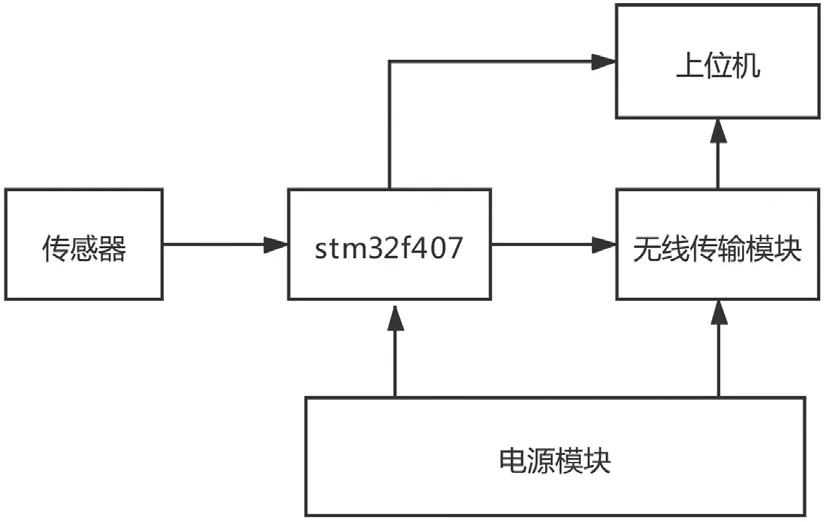
图1:检波器设计方案
3 硬件设计
3.1 单片机
本次设计核心采用STM32F407ZG单片机。STM32F407ZG单片机拥有以ARM Cortex-M4处理器32位RISC为内核的处理器,工作频率高达168M Hz,并且支持浮点运算和数字信号处理功能,具有丰富的外设,有着高性能、低成本、低功耗等优点。[8-9]同时,stm32具有两个DMA控制器,可以不经过cpu,直接进行数据的高效传输,节省了cpu的资源,加快数据处理。相较于8位的51单片机,stm32位数更高,具有更高的性能和更低的功耗,符合本系统的设计理念。
3.2 传感器
传感器选择MPU6050,整合型9轴运动处理传感器,包括3轴陀螺仪、3轴加速器和I^2C端口,可测范围为±2g到±16g之间,实现对快速和慢速运动的准确测量。相较于多组件方案,免除了组合陀螺仪与加速器时间轴之差的问题,减少了大量的封装空间。每个陀螺仪和加速度器的内部包含1个16位的A/D转换器,能够将其测量的模拟量转化为数字量,实现AD转换过程。传感器基于压电效应,其元件由压电材料制成,受力后表面产生电荷。此电荷经电荷放大器和测量电路放大后成为正比于所受外力的电量输出,从而计算出物体此时的加速度。
3.3 无线传输模块
无线传输模块选用NRF24L01无线传输模块,最高发射功率0dBm,接收灵敏度为-85dBm,支持125个通讯频率。支持6个数据通道(共用FIFO),支持 1Mbps和 2Mbps的空中数据传输速率。使用SPI接口与MCU完成数据通讯与通讯控制等功能。功耗低,不需要外加声表滤波器也可以有良好的通信效果。符合低功耗、低成本的系统设计理念。
4 技术分析
技术分析如图2,人工震源锤击地面发出震动,传感器接受地面震动产生的加速度后向单片机传送数据,单片机对加速度进行补正、合成、滤波后可通过无线或有线方式输出到上位机。

图2:检波器的技术分析
4.1 物体加速度分析
MPU6050可以测量出物体的三轴加速度和三轴陀螺仪的欧拉角,得到重力加速度在x轴、y轴、z轴上的分量,以及合成加速度大小,合成加速度大小是重力加速度和物体加速度之和。
4.1.1 物体欧拉角
振动时,物体姿态可能会发生变换,需要利用陀螺仪测得的欧拉角补偿。在没有外力的作用下,MPU6050内部内置三轴陀螺仪会负责确定相应轴的旋转速度,陀螺仪的工作原理是,旋转物体围绕方向不改变的旋转轴旋转,同时得到X 、Y、 Z轴的旋转加速度。
陀螺仪测得欧拉角工作原理如图3所示。
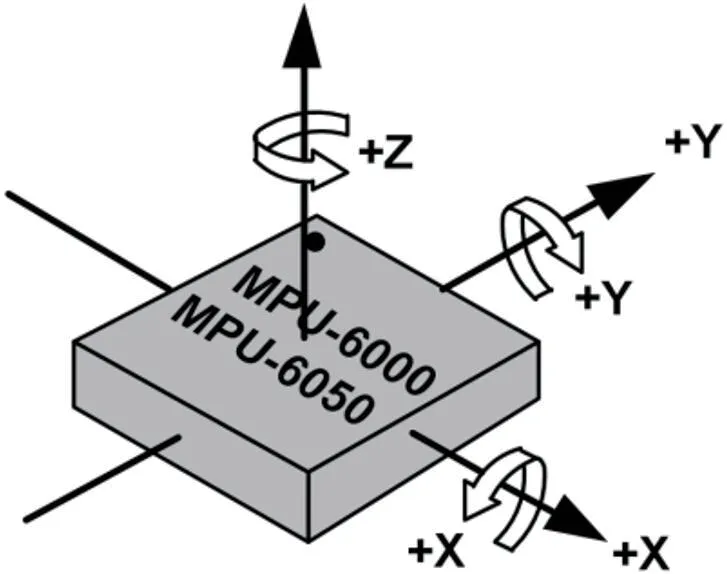
图3:陀螺仪工作原理
欧拉角由三部分组成,分别为横滚角(绕向前的轴旋转),俯仰角(绕向前的轴旋转)和航向角(绕向前的轴旋转)。通过陀螺仪测得的加速度和欧拉角,根据方向余弦,可以得到物体加速度在X 、Y、 Z轴的分量,用以补偿物体真实加速度。有时可以根据这个道理,判断旋转物体是否发生倾覆,保持原有的方向,然后,读取轴指定的方向并自动传输数据信号。
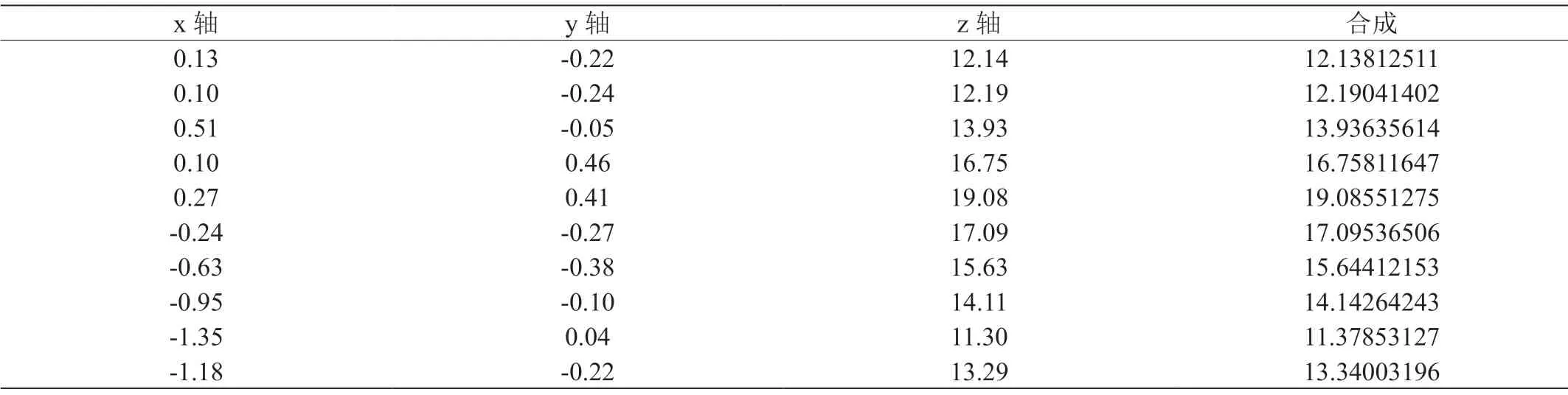
表1:三轴加速度数值
4.1.2 物体实际加速度
使用MPU6050三轴加速度计,加速度计的读数,不是g(9.8m/s2)为单位的,而是以LSB为单位的,在读出物体加速度之后需要做最后的转换表示,以准确表示加速度计分辨率,使用如下公式进行计算。
Rx = ADCRx /灵敏度
4.2 加速度模的合成
实验中,通过对加速度进行采集,得到由单片机输出的实际物体三轴加速度,并对加速度进行合成,在短时间内,我们认为震动的方向是保持不变的,加速度的方向不影响对幅度大小的判断,直接进行加速度的模值的合成即可。
4.3 加速度滤波算法
在实验进行数据采集时,采集到的数据往往会有随机误差,由于存在随机干扰,因此,在相同条件下测量同一量时,数据的数值和方向会出现无规律的变化,影响实验结果,但多次测量的结果符合统计规律。为克服随机干扰引起的误差,在硬件上使用滤波技术,在软件上使用软件算法实现数字滤波。使用数字滤波算法无需多余硬件成本,简化了封装,同时不存在阻抗匹配问题,可靠性高,实时性强。本设备使用加权平均滤波算法,对不同时刻的数据加以不同的权:通常是,越接近现时刻的数据,权取得越大。给予新采样值的权系数越大,则灵敏度越高,但信号平滑度较低。通常检波器所采用的的滤波算法多为限幅滤波法、中值滤波法、算术平均滤波法等,本设计采用的加权平均算法则是突出最近的采样数据在整体中的比重,该算法有效的提高了检测的灵敏度,相较常用的算术平均算法有较大的提升。
5 实验结果
通过传感器测得物体的三轴加速度,x轴y轴z轴的加速度分量是真实加速度和重力加速度的合成,通过陀螺仪对欧拉角的测量,得到真正的加速度。实验得到的三轴加速度数值如1所示。
为消除测量噪声,需对所测到的三轴加速度进行滤波,滤波后对加速度进行合成,此步骤为直接进行加速度的模值的合成,原因是,本次设计只关心加速度模值的大小,且认为,短时间内,地震方向不发生改变,则加速度的方向也不改变,加速度的模值的合成表如表2所示。
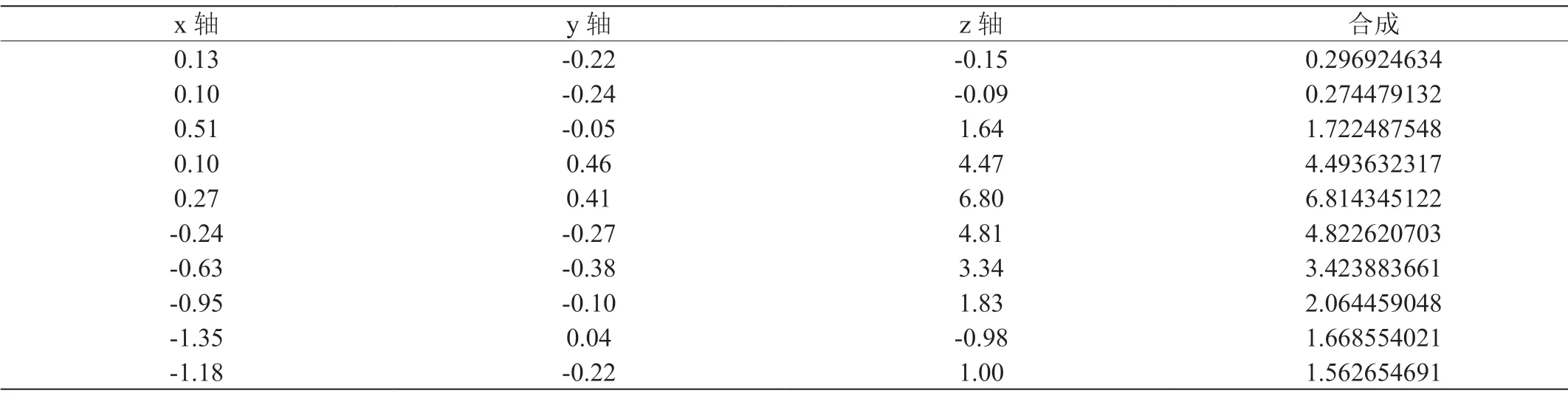
表2:滤波后的加速度
滤波前后加速度对比如图4所示,可以看出,经过滤波后,加速度误差得到了明显的减小,从而验证使用的算法的正确性。
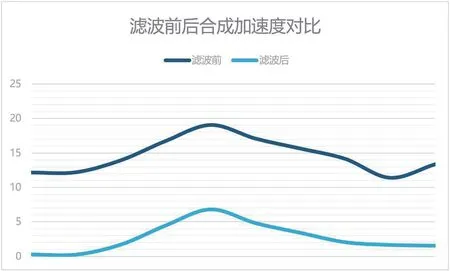
图4:滤波前后加速度对比
6 结论
本文设计一个地震检测仪,用于检测人工产生的地震波,并向上位机传送得到的数据。检测仪基于stm32f407单片机和MPU6050传感器组成。传感器与单片机固接在同一电路板上,并将电路板置于要检测的位置,以检测想要检测的部位。检测震动波形的过程如下,首先传感器获取地震过程中地面振动的三维加速度,再由单片机对加速度进行滤波,然后对加速度进行矢量合成,将加速度信息传递给上位机,经人工模拟地面机械振动过程,经地震波检测仪的检测和处理,获得了地面机械振动的加速度,取得了良好的检测结果。
