一种基于小惯量红外稳定平台的复合电流控制方法
2021-03-06张雁伟李锐华舒骏逸阎歆婕冯建伟
熊 辉,林 宇,张雁伟,李锐华,舒骏逸,阎歆婕,冯建伟
一种基于小惯量红外稳定平台的复合电流控制方法
熊 辉,林 宇,张雁伟,李锐华,舒骏逸,阎歆婕,冯建伟
(昆明物理研究所,云南 昆明 650223)
小型化和高动态是红外成像稳定平台技术的发展趋势。由于转动惯量小,传统的PI型电流环控制难以克服反电动势的斜坡干扰,将降低小惯量红外稳定平台的动态响应。同时,高动态的小惯量红外稳定平台技术另一难点是平衡动态性和抗扰性能。为解决上述问题,本文提出一种基于无差拍预测控制和扩张状态观测的复合电流控制方法,有效提高了小转动惯量红外稳定平台的动态响应能力和抗干扰能力。仿真和实验结果表明,该复合电流控制方法将小惯量红外稳定平台电流环的调节时间缩短1/3,对速度响应的动态性能和抗干扰性能都有明显改善作用,而且具有很好的鲁棒性能。
红外稳定平台;小转动惯量;电流环;复合控制
0 引言
随着现代战争局部化、高科技和信息化的发展,红外探测技术运用越来越广泛。红外成像稳定平台作为实现精准探测的核心部件,主要通过稳定平台搭载红外热像完成对目标的自动搜索、自主识别和快速捕获、稳定跟踪[1]。稳定平台伺服系统的性能直接影响着隔离载体刚性扰动、控制探测器视轴指向的能力。红外制导与搜索跟踪技术的发展与进步,更是对稳定平台的小型化结构和高动态伺服性能提出了更高的要求[2]。相比有刷直流电机,永磁同步电机采用高性能永磁铁励磁和电子换相技术,具有空间体积更小、功率密度更高、可靠性更强等优点,因此受到了研究人员的广泛关注。
基于矢量控制策略的位置、速度、电流三闭环结构是永磁同步电机伺服系统经典的控制形式。其中,电流环性能决定着永磁同步电机伺服控制的品质[3-4]。目前,对于车载搜跟、机载光电吊舱等红外成像稳定平台系统,因转动惯量较大,在设计电流环时一般使用PI(Proportion Integral)型控制器将电流环简化为一阶惯性环节[5]。然而,对于红外制导等转动惯量很小的小型稳定平台,如果按照此工程设计方法,电流动态响应性能将显著恶化,难以满足伺服系统性能要求。
为优化和提高小转动惯量永磁同步电机电流环控制的性能,研究人员进行了很多的研究工作。蒋学程等将内膜控制用于小转动惯量的永磁同步电机电流环控制,并在此基础上考虑逆变器非理想特性的影响,设计了二自由度内膜控制器,改善了小转动惯量永磁同步电机电流跟踪性能[6];杨明等基于微小转动惯量永磁同步电机PI电流控制性能恶化的分析,提出了增加积分环节构成二重积分和在电流调节器输出补偿反电动势两种解决方案来改善电流环性能[7];王宏佳等基于机器人微小型关节驱动的应用,研究了永磁同步电机电流环带宽的影响因素,并采用电压平均值预测的方法改进了无差拍电流预测控制算法,提高了电流环的动态性能[8]。但是,这些研究都是基于小转动惯量永磁同步电机处于相对稳定的应用背景开展的,如机器人仿人关节控制等。对于干扰强而动态性要求高的小惯量红外稳定平台等复杂应用的研究很少。
本文首先针对红外稳定平台转动惯量小的特点,分析传统永磁同步电机PI型电流控制的缺点;然后,针对小惯量红外稳定平台高动态性能的需求,研究无差拍预测的电流控制技术,并分析其不足之处。接着,为使小惯量红外稳定平台获得高平稳和高动态的探测器视轴指向控制性能,提出了基于无差拍预测和扩张状态观测的复合电流控制方法。最后,通过仿真和半实物仿真实验,验证复合电流控制方法对小惯量稳定平台动态响应和抗扰性能的优化作用,得到了较好的控制效果。
1 电流环控制器的设计与分析
永磁同步电机的矢量控制通过三相静止坐标系到转子d、q轴同步坐标系的坐标变换,将正弦波电流矢量分解为独立的励磁分量d和转矩分量q,模拟了他励直流电机的控制[9]。为方便分析,将摩擦力矩集中到负载力矩中,并忽略反馈环节的滤波作用。基于d=0的速度、电流双闭环矢量控制框图如图1所示。图中,ASR、ACR表示速度控制器和电流控制器;空间矢量调制及逆变器部分等效为时间常数为pwm的一阶惯性环节;、p、f、分别表示电机定子电阻、极对数、永磁体磁链和转动惯量;*、m和q*、q分别表示速度、q轴电流的给定值和反馈值;q为q轴电压输出量;d表示扰动转矩。
根据图1,q轴电流环的控制对象为:

按照工程设计方法理论,大转动惯量的系统,机电时间常数很大,可忽略反电动势对电流的影响。q轴电流环的控制对象简化为双惯性环节,利用PI控制器消去控制对象中大时间常数的极点,最终将电流环开环传递函数简化为典型Ⅰ型系统[10]。
此时,电流环截止频率满足简化条件[10]:
但对于小转动惯量的系统,此条件很难成立。因为机电时间常数m很小,而且PWM(pulse width modulation)占空比更新等固有延迟都会限制着电流环带宽的提高。所以小转动惯量系统的电流环设计不能忽略反电动势的影响,不能简化控制对象。
小转动惯量系统的电流环,即使在干扰力矩d=0时,还存在由反电动势带来的斜坡输入干扰。根据式(1),PI电流控制的电流环阶跃响应存在稳态误差:
式中:i表示PI型电流控制器的积分系数。
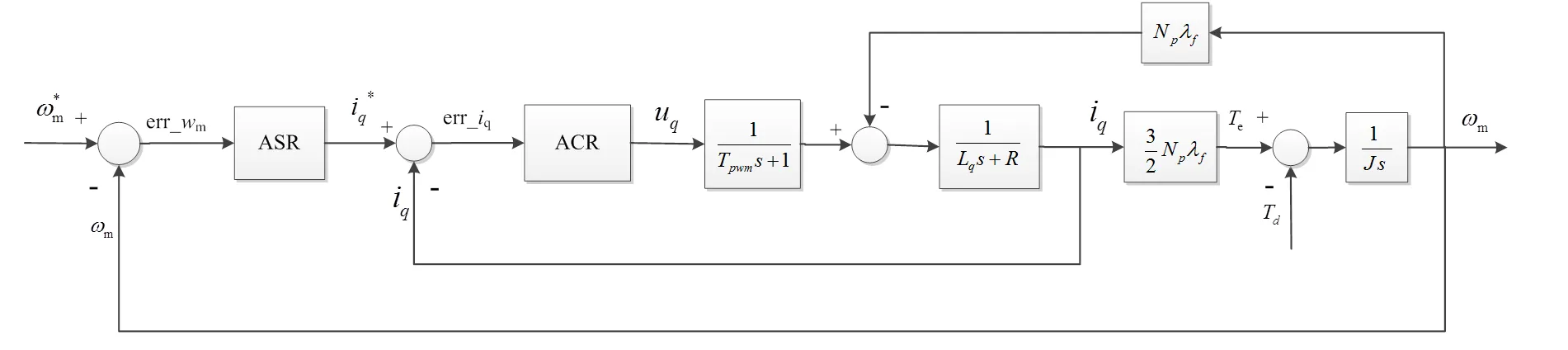
图1 基于id=0的永磁同步电机速度、电流双闭环矢量控制框图
由图2可知,电流环阶跃响应稳态误差与转动惯量(机电时间常数)成反比。甚至可以预见,存在扰动力矩干扰时速度波动引起的反电动势波动将使得PI控制的电流环性能严重恶化。
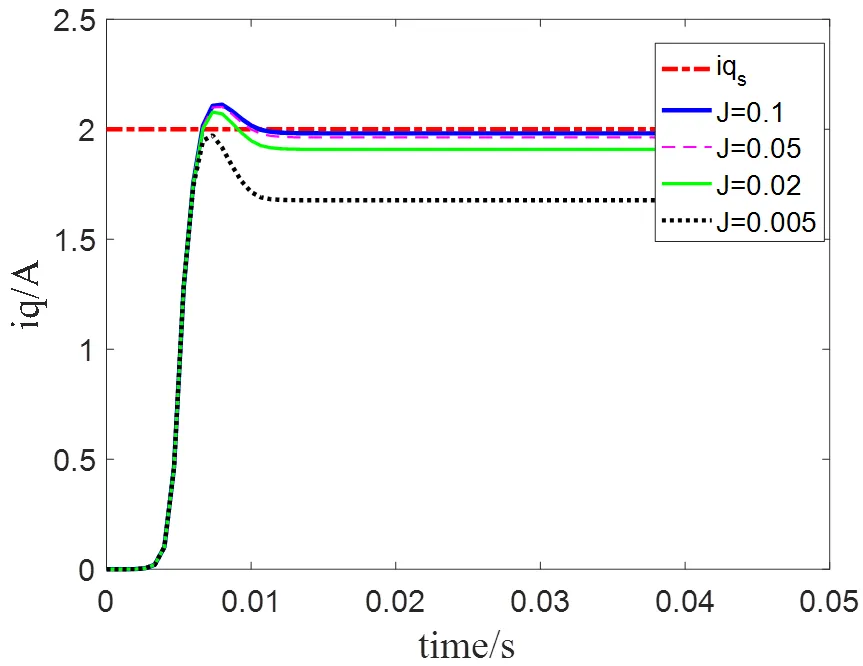
图2 不同转动惯量J下反电动势对PI控制电流环性能的影响
因此,针对小惯量红外稳定平台转动惯量小的结构特点和干扰强的运行环境特点分析,可得出以下结论:
1)PI电流控制存在电流跟踪误差,探测器视轴速度调整的动态性能将受到影响。
2)稳定平台需要频繁的启停和加减速以隔离弹体强扰动干扰,PI电流控制固有的超调和延迟等缺点会造成较大的视轴速度波动。特别是在小转动惯量条件下,PI电流调节误差更会加剧速度的波动。
所以,传统的PI型电流控制难以满足小惯量红外稳定平台的性能需求。要改善小惯量红外稳定平台视轴速度快速调整和平稳跟踪的性能,必须优化电流环的控制。
2 高动态复合电流控制方法的研究
2.1 无差拍电流预测控制的基本理论
无差拍预测控制作为一种利用系统输入输出预测被控量未来变化的自动控制方法,能够在一个控制周期内实现指令零误差控制,常用于需要高动态响应的场合[11-13]。
将转子旋转坐标系下的永磁同步电机电压平衡方程差分离散化,即可得到电流预测的基本方程:
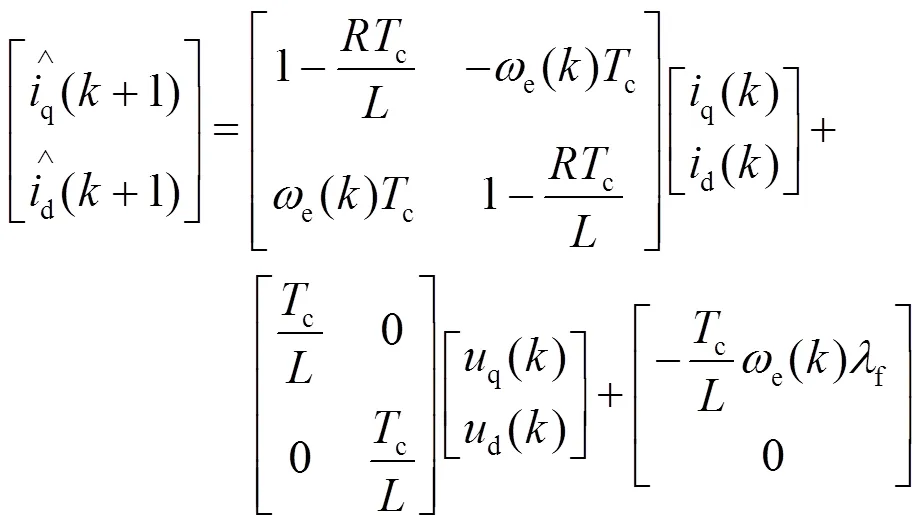
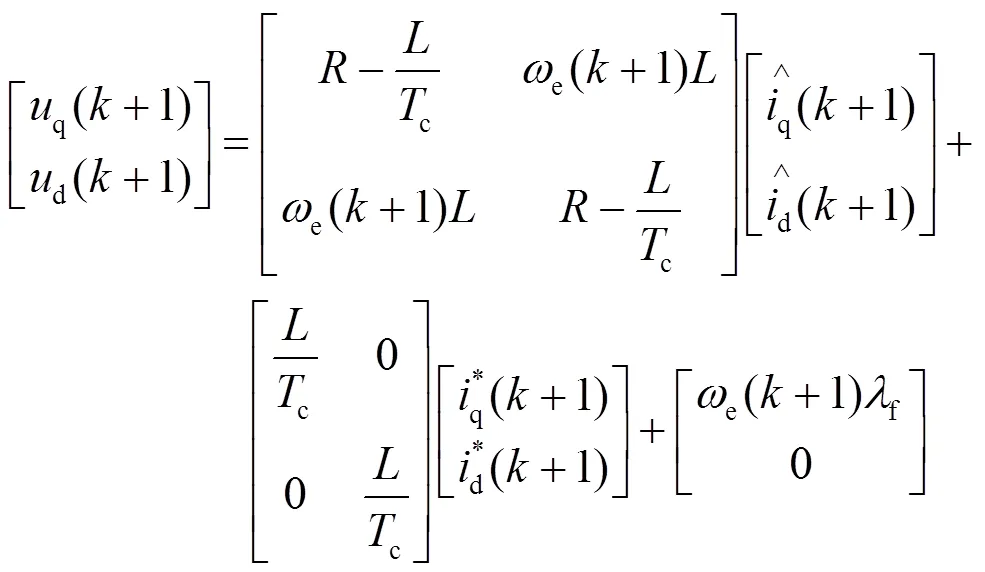
根据数字控制器PWM占空比延后一个控制周期更新的规则,此电压矢量将在下一周期开始处,即+1时刻输出。因此,第周期[+1]内,无差拍电流预测控制的控制方程为:
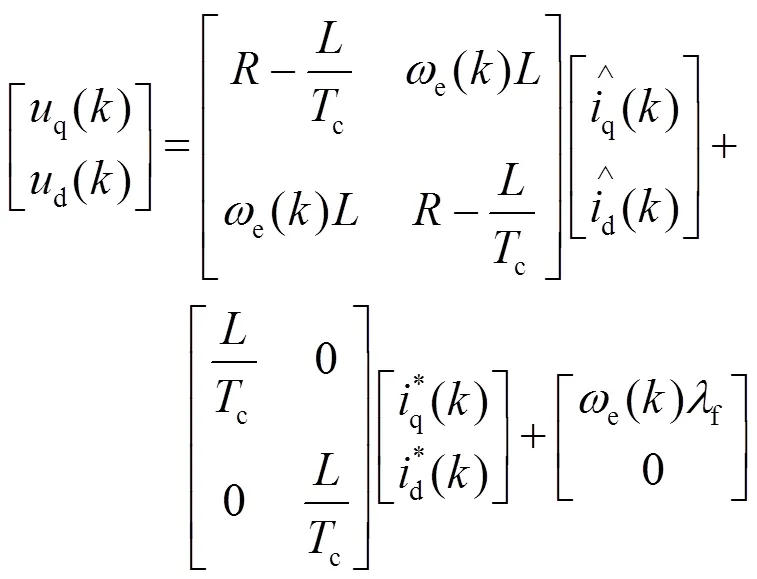
可见,无差拍电流预测控制方法消除了数字控制器PWM占空比更新的延迟,实现了第周期内时刻控制电压矢量的加载(控制时序如图3所示),能够在一个控制周期后实现电流的无误差跟踪。
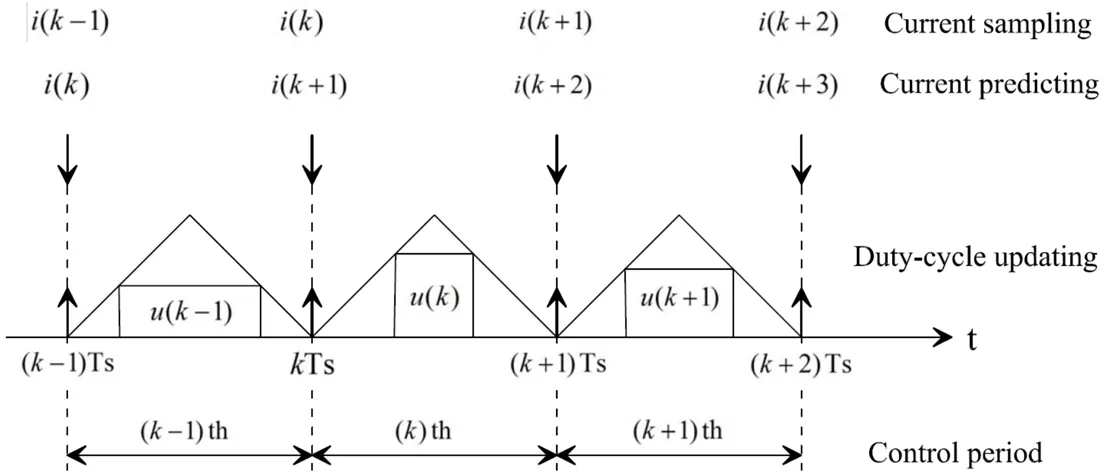
图3 基于无差拍电流预测控制的数字控制系统时序图
然而,无差拍电流预测控制本质上是基于模型的控制方法,模型参数的不准确和功率开关等硬件的非理想特性都会使得电流控制存在偏差,导致性能的下降,严重时甚至会造成系统的不稳定。根据表1所列的小转动惯量永磁同步电机参数,无差拍预测电流控制的电流环响应曲线如图4所示。
从图4可以看出,无差拍预测的电流控制方法虽然能够获得快速的电流环动态响应性能(上升时间约1ms,无超调),但是其存在控制稳态误差,且误差逐渐增大。因此,无差拍预测电流控制方法不能直接用于小惯量红外稳定平台的电流环控制,必须进行适当的改进。
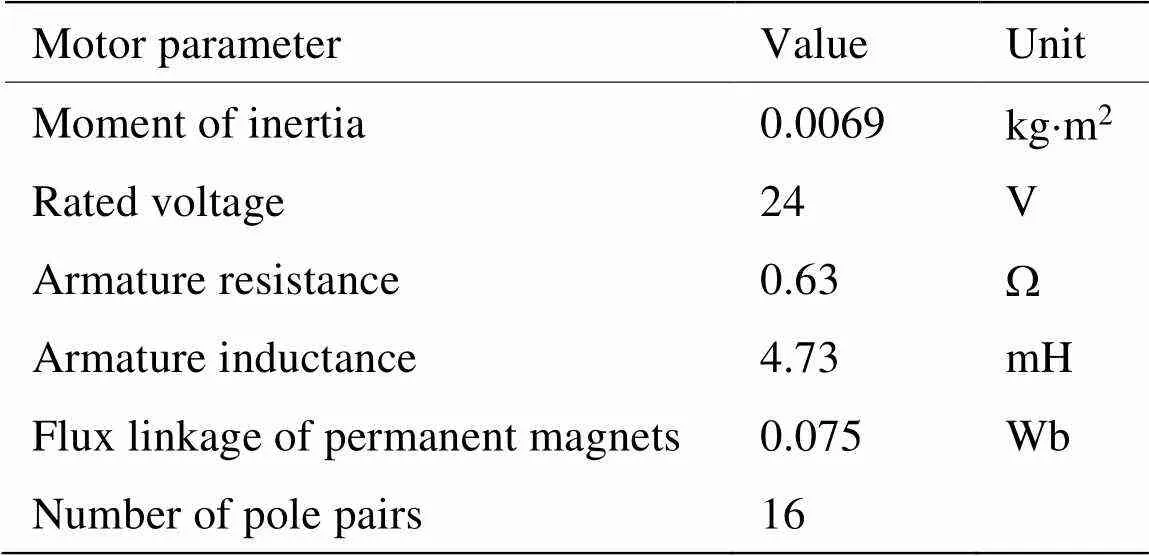
表1 小转动惯量的永磁同步电机参数
2.2 高动态复合电流控制器设计
为了解决PI型电流控制和无差拍电流预测控制方法在小转动惯量电流环控制中存在控制误差的问题,本文提出了基于无差拍预测的复合电流控制算法,期望在继承无差拍电流预测控制快速响应的基础上,既能消除稳态误差,又能改善电流环的动、静态性能。同时,为及时抵消小惯量红外稳定平台受到的强扰动、保证探测器视轴速度的平稳,在复合电流控制的基础上设计了扩张状态观测器(Extended State Observer,ESO)的扰动观测前馈补偿,以改善系统的抗扰性能。
无差拍预测复合电流控制如图5所示,两者并行复合控制。在电流变化的瞬间过程,无差拍预测控制起主要作用,预测电流并根据电流预测偏差输出电压控制量,实现快速的动态电流调节;在电流跟随的稳态过程,能够消除指令电流与反馈电流之间的静差,实现高精度的稳态电流跟随。
此时,式(6)表示的电压控制方程扩展为:

扩张状态观测源于自适应控制理论,基本思想是:将扰动量当作系统的一个状态量,利用可测状态变量估计不可测的扰动并产生电流前馈的补偿量,及时调整电流给定值以抵抗扰动影响。
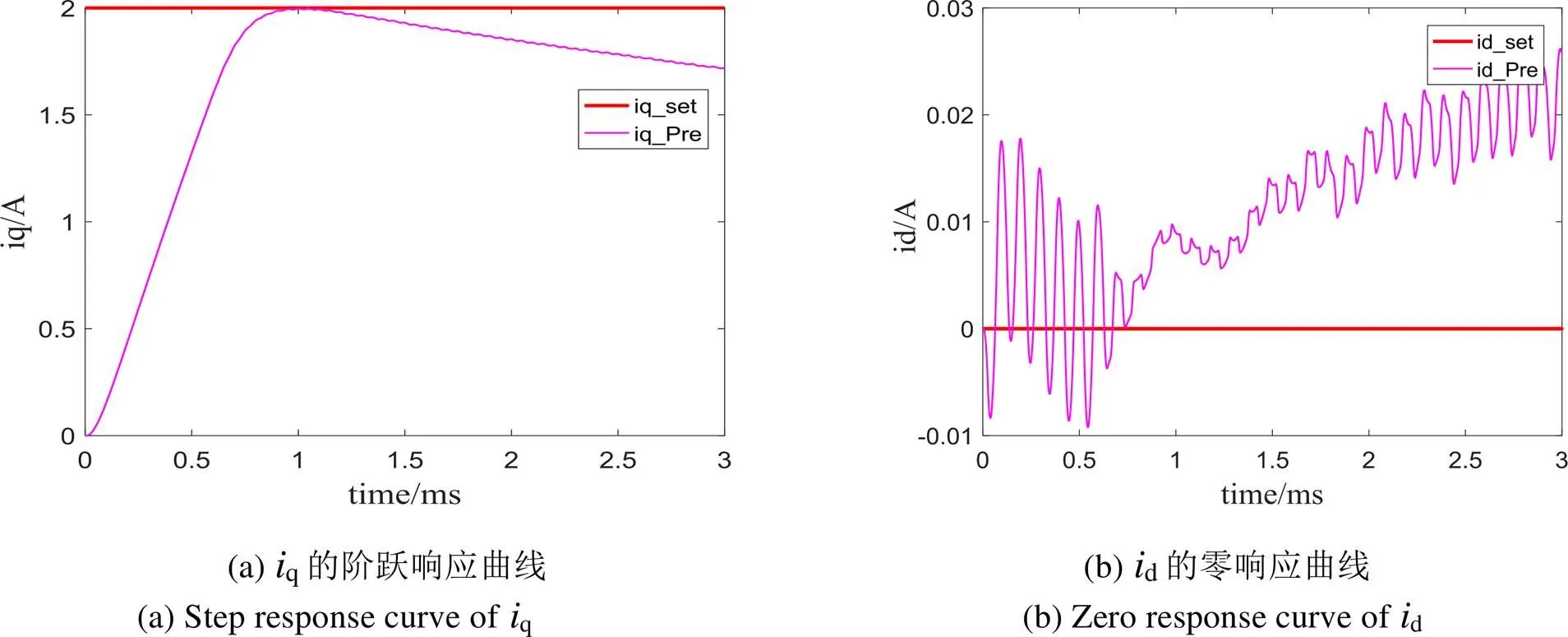
图4 无差拍预测控制的电流环响应曲线
根据文献[14-16],将参数变化引起的转矩波动、外界负载扰动l、摩擦都集中为一个总扰动d。将其当作系统的扩展变量并做归一化处理d/。由此,可将永磁同步电机的机械运动方程变形为:
观测误差为:
根据矩阵理论知识,观测误差矩阵的特征方程为:s=2+1+2。取1=2,2=2,即可通过扩张状态观测器的闭环极点-(>0)控制零观测误差的变化趋势,实现对扰动量的观测。图6表示搭建的扩张状态观测扰动前馈补偿模型。
3 实验与结果分析
3.1 仿真分析
基于MATLAB仿真平台分别比较了PI型电流控制和本文设计的复合电流控制的电流环性能及对速度外环跟随性和抗扰性的影响,并且对比了系统的鲁棒性能。仿真控制频率设置为10kHz,小惯量红外稳定平台电机参数如表1所列。
3.1.1 电流环性能对比
本部分在小惯量红外稳定平台扰动力矩d=0的基础上,对比PI型电流控制和本文设计的复合型电流控制的电流环动态性能。仿真实验中,设定q轴电流的给定值为2A,并用i_set、i_PI、i_new分别表示电流给定和PI电流控制、复合电流控制作用下的电流阶跃响应。所得的电流阶跃响应曲线如图7所示。
从图7(a) q轴电流的阶跃响应可以看出,相比PI型控制,复合电流控制的调节时间从2ms减小到0.76ms,缩短为1/3,而且无超调,稳态精度更高。从图7(b) d轴电流的零响应曲线看出,复合电流控制稳态精度差的数量级为10-3,而PI控制的稳态精度差数量级为10-2,且相对波动较大。
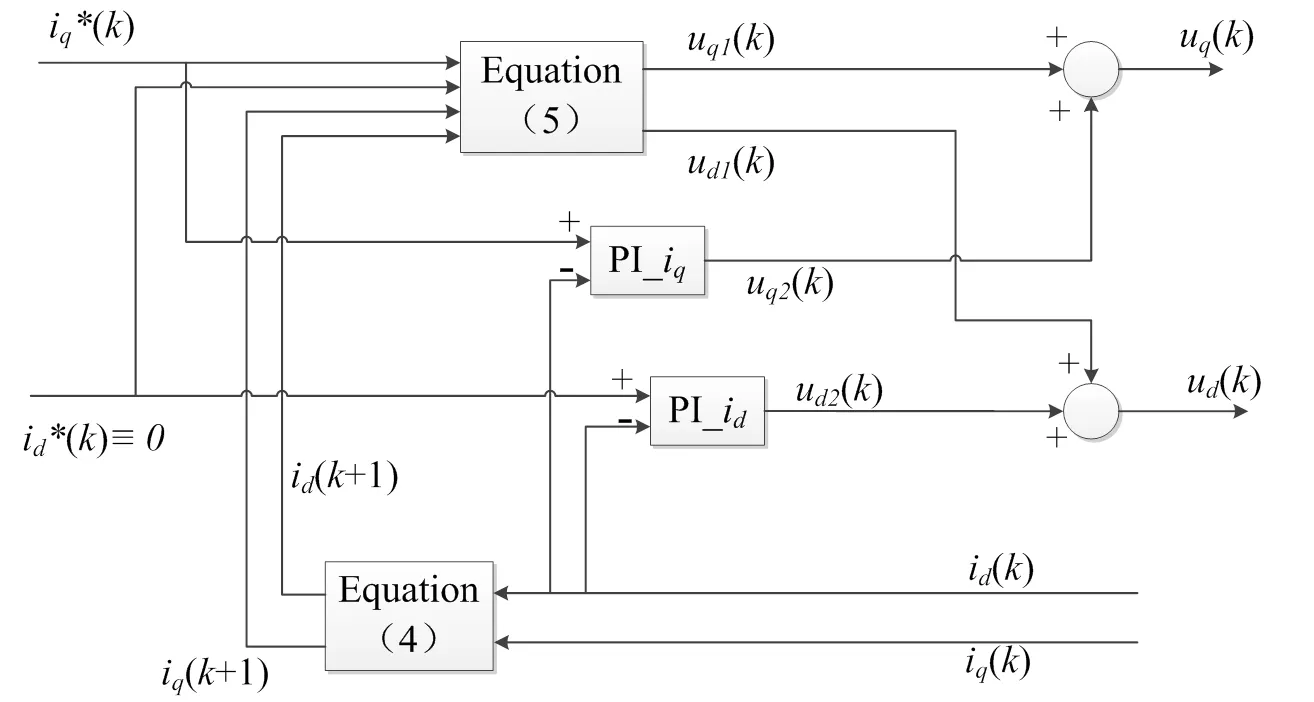
图5 基于无差拍预测的复合电流控制原理框图
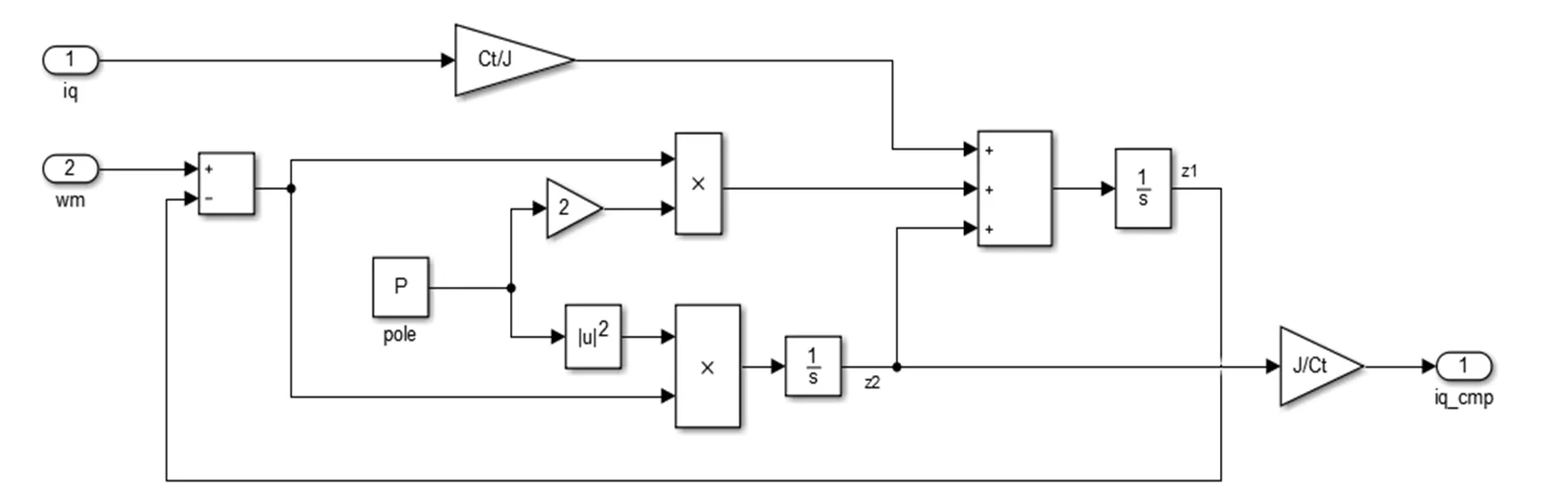
图6 基于扩张状态观测的扰动前馈补偿模型
因此,本文所提出的复合电流控制方法不仅继承了无差拍电流预测控制快速响应的优势,而且兼备PI控制消除静差的优点,最终实现了q轴电流无超调、0.76ms快速调节和高稳态精度的电流控制。
3.1.2 对速度环性能的作用
本部分首先对比PI型电流控制和复合电流控制对小惯量红外稳定平台速度外环跟随性能的影响效果,其次对比基于两种电流控制器内环作用的速度外环在有无ESO扰动观测前馈补偿时的抗扰动性能。实验中,速度控制器选用经典的PID控制器,并且为了区别速度控制器对实验结果的影响,分别在不同的速度环增益参数K下进行了对比实验。
1)对速度环跟随性能的作用
在外界扰动和扰动观测补偿未激活的情况下,通过模拟小惯量红外稳定平台突然正向加速和突然反向调转的极限工作模式,验证两种电流控制器控制的电流闭环对速度外环跟随性能的影响效果。实验中,设定转速给定值在15ms时从1r/min阶跃到10r/min,在40ms时从10r/min反向阶跃到-10r/min。使用n_set、n_PI、n_new分别表示速度的给定和基于PI型电流控制器、复合电流控制器作用的速度响应,结果如图8所示。
从图8中可以看出,在调整速度环增益参数K的过程中,增大K的值,都能减少基于两种电流控制器内环作用的速度外环正向加速和反向调转的速度超调量。但是,对于相同的K设定,相较于PI电流控制,基于无差拍预测复合电流控制内环作用的速度外环在给定速度突变时,速度响应曲线振荡次数和振荡峰值都比较小。
2)对速度环抗扰动性能的作用
加入幅值为0.25Nm、频率为5Hz的正弦扰动力矩,模拟小惯量红外稳定平台受载体振动、基座摩擦、风阻等力矩扰动的运行工况,验证引入ESO的扰动前馈补偿前后,基于两种电流控制器内环作用下的速度外环抗扰动性能。使用n_PIE、n_newE分别表示引入ESO前馈补偿后的基于PI型电流控制器、复合电流控制器作用的速度响应,结果如图9所示。
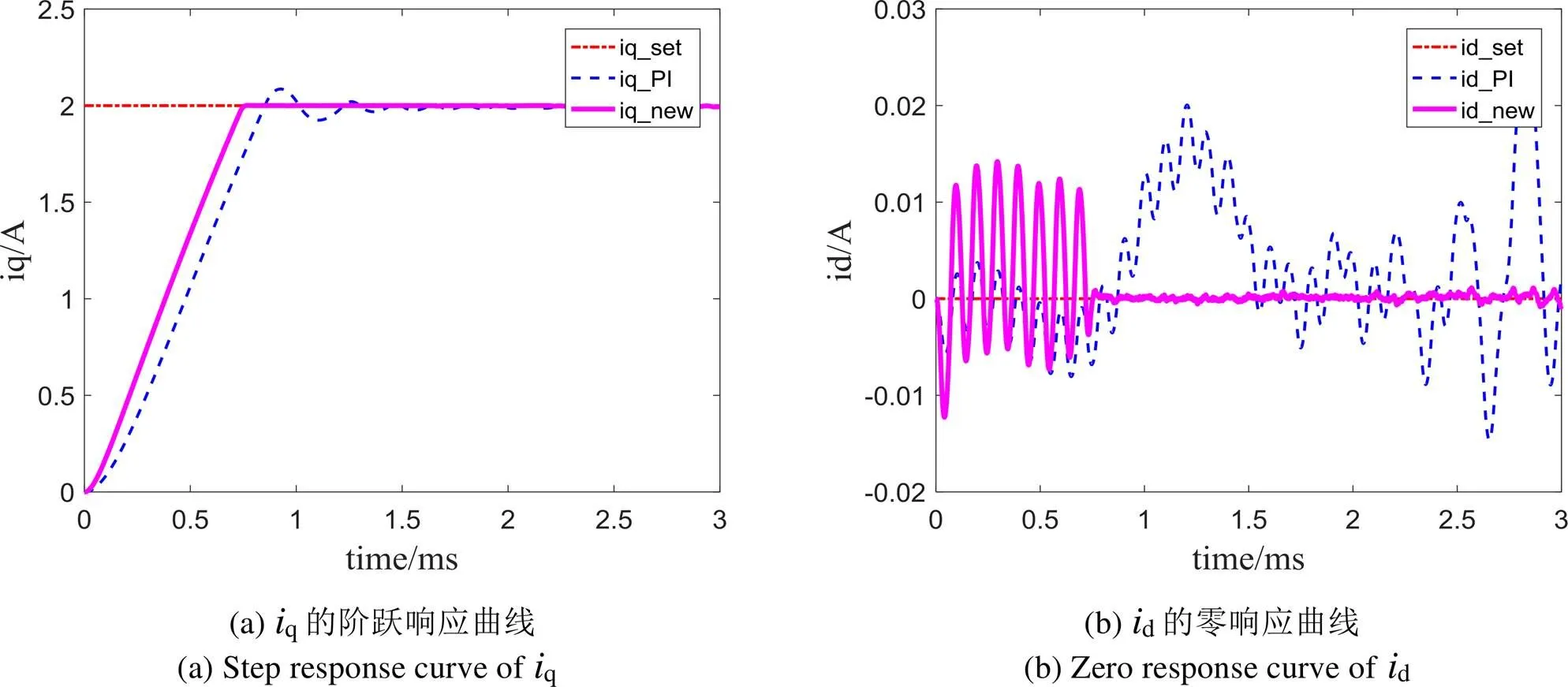
图7 两种电流控制器的电流环性能对比
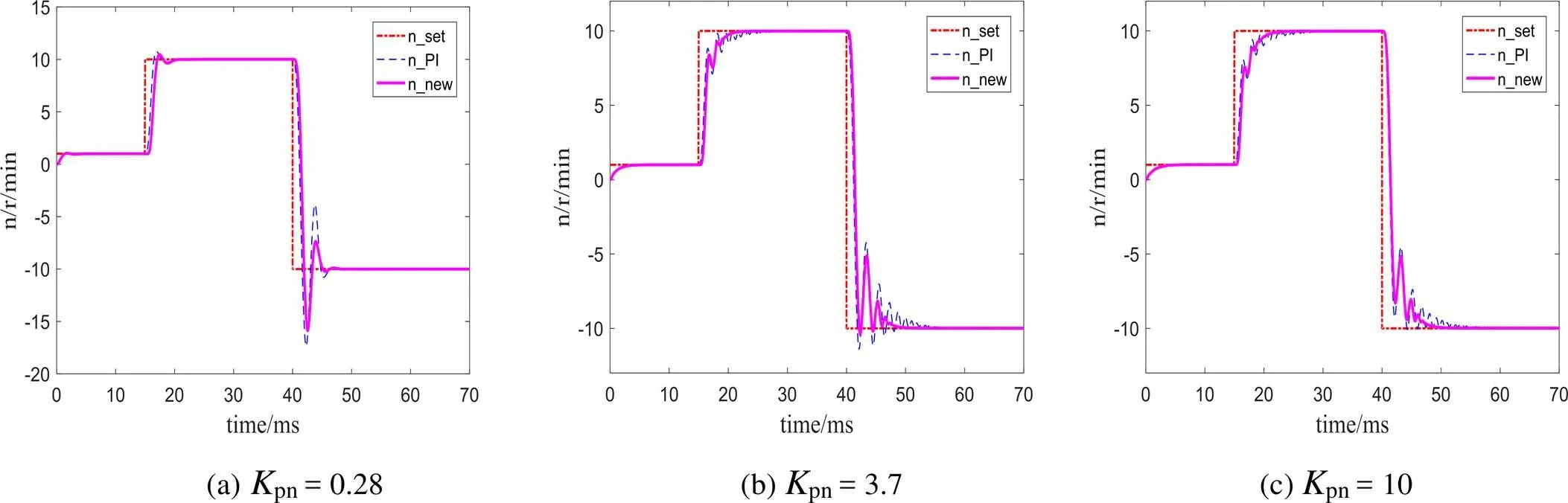
图8 两种电流控制器对跟踪性能的影响
从图9可以看出,引入ESO前馈补偿后,基于两种电流控制器内环作用的速度外环受扰后的系统稳定性有明显改善,且增大pn的值都能减少速度外环受扰动时的速度动态降落。但是,随着pn的增大,基于PI电流控制器内环作用的速度响应曲线出现振荡,且pn越大,振荡越剧烈;而基于无差拍预测复合电流内环作用的速度响应曲线只在pn很大时出现小幅振荡。
综合图8和图9可知,相比较于PI型电流控制器,本文设计的复合电流控制器能够明显改善速度外环的跟踪性能和抗扰动能力。只要pn设定合适(如图8(b)、图9(b)中pn设定为3.7)时,将获得很好的动态响应和抗扰性能,满足小惯量红外稳定平台高动态和高平稳的视轴速度调整需求。
3.1.3 对控制系统鲁棒性的作用
考虑到实际小惯量红外稳定平台使用的严峻环境,还对比了PI型电流控制和本文所设计的复合电流控制作用的系统鲁棒性。整个鲁棒性研究实验,以表1所列参考值作为控制器参数,将电机模型中的电阻、电感参数值设置为参考值的1.2倍,永磁铁磁链值为0.8倍[12]。使用i_PI_1、i_newE_1和n_PI_1 、n_newE_1分别表示PI型电流控制器和复合电流控制器作用的控制系统在电机模型参数变化后的电流和速度响应。图10为电机模型参数变化前后的电流环响应曲线。图11为电机模型参数变化前后的速度环扰动响应曲线,其中实验扰动力矩和速度外环PID参数与速度环抗扰实验(图9(b))相同。
从图10可以看出,所设计的复合电流控制器在参数变化后,q轴电流阶跃响应无超调;调节时间约为0.85ms,对比参数变化前,相对变化1.3%,但仍近似等于参数未变化的PI型电流控制的上升时间。d、q两部分电流响应均表明,所设计的复合电流控制器,在电机模型参数变化前后,电流闭环响应都能保证数量级约为10-3的高稳态电流控制精度;而PI型控制的电流响应稳态精度约为10-2且波动较大。
从图11(a)低速响应曲线可以得到,电机模型参数变化后,基于本文复合电流控制器作用的速度响应在受扰动后速度动态降落约1.8%,对比参数变化前的受扰降落,相对变化1.2%;而基于PI型电流控制器作用的速度动态降落约为4.6%,相对变化3%,且出现低速振荡。从图11(b)高速响应曲线可看出,电机参数变化后,基于复合电流控制器作用的速度响应在受扰后的速度动态降落约1.6%,小于电机模型参数变化前基于PI型电流控制器带来的速度动态降落(约为1.7%)。除此之外,相对于PI型电流控制,在参数变化前后,基于复合电流控制器作用的速度环响应曲线较为平滑,受扰后恢复时间较少。
综合比较,无论是电流环响应,还是对受扰动后速度环响应的影响,本文设计的复合电流控制器都具有良好的鲁棒性能。
3.2 半实物实验与结果分析
基于HiGale仿真系统,搭建快速控制原型(Rapid Control Prototype, RCP)的半实物仿真实验平台,对比PI型电流控制器和复合电流控制器的作用效果。半实物仿真验证平台架构如图12所示:小惯量稳定平台的电机参数如前表1所示;角度通过1:32极对的双通道旋转变压器获得,并差分滤波后得到角速度;电流由华电自动化生产的HD-B17霍尔式电流传感器采集;通过联轴器轴向连接磁粉制动器,模拟扰动负载。
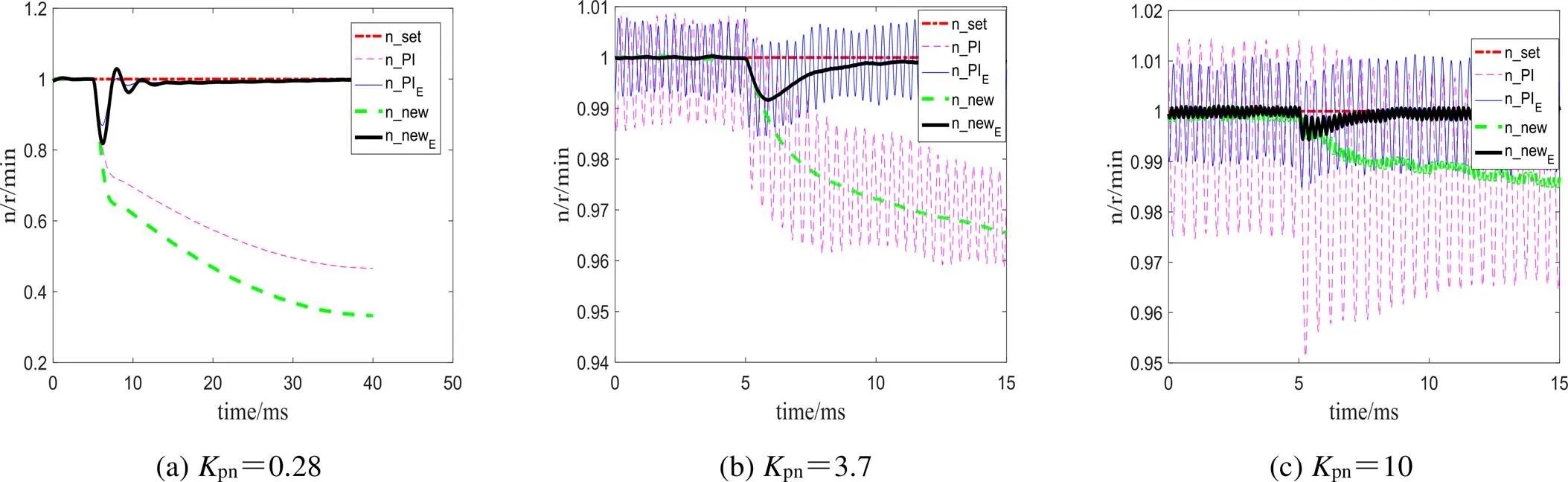
图9 ESO前馈补偿下两种电流控制器对抗扰性能的影响
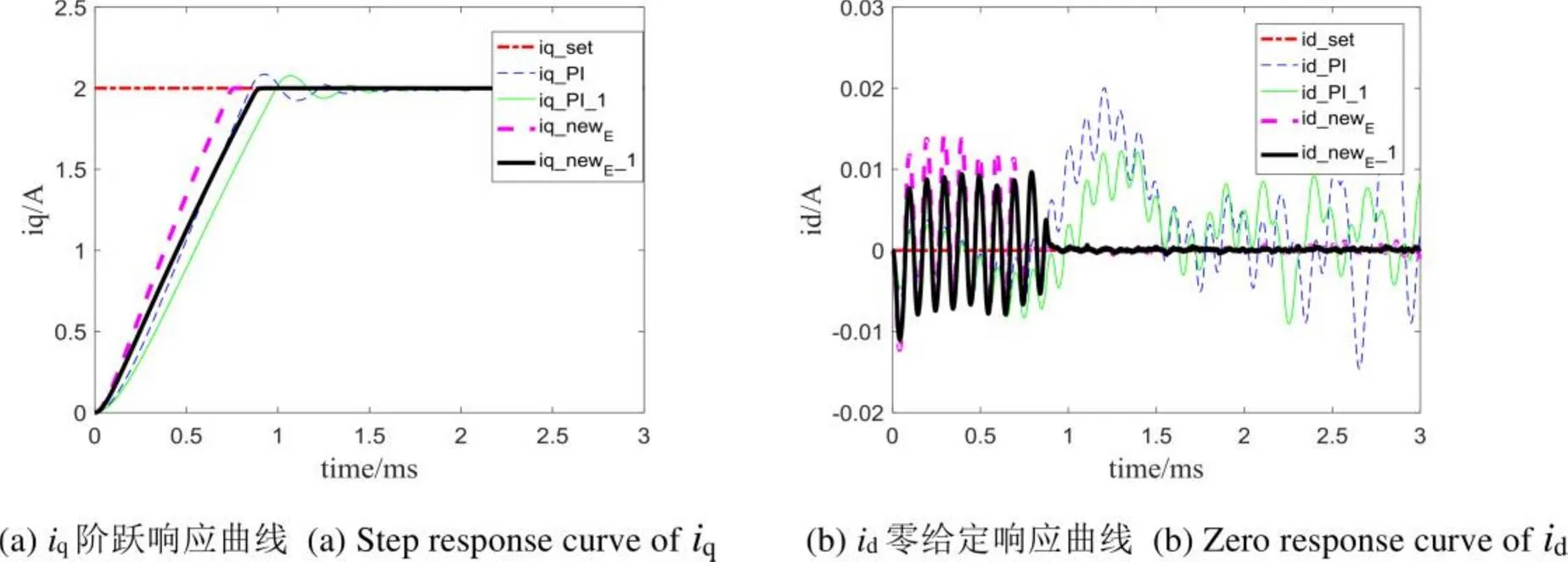
图10 电流响应鲁棒性能对比
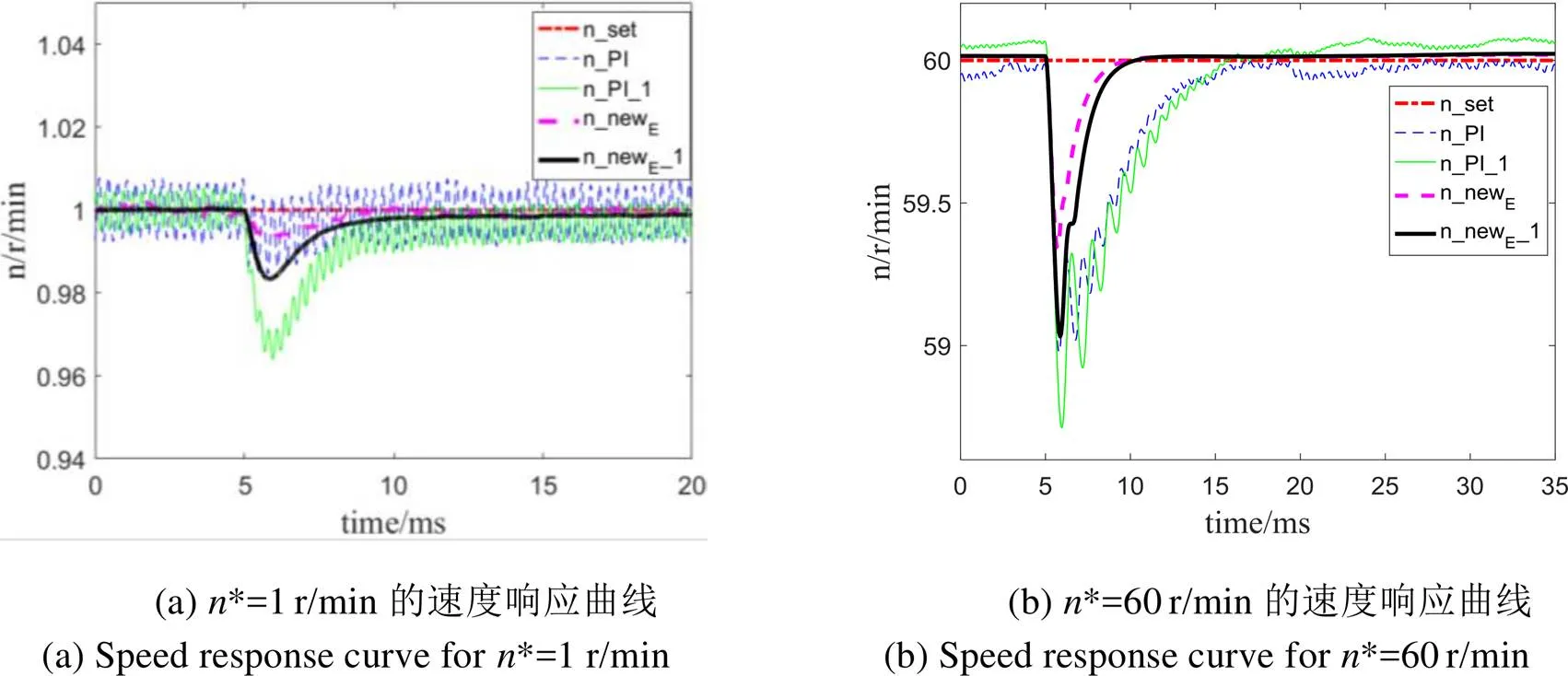
图11 速度环抗扰鲁棒性能对比
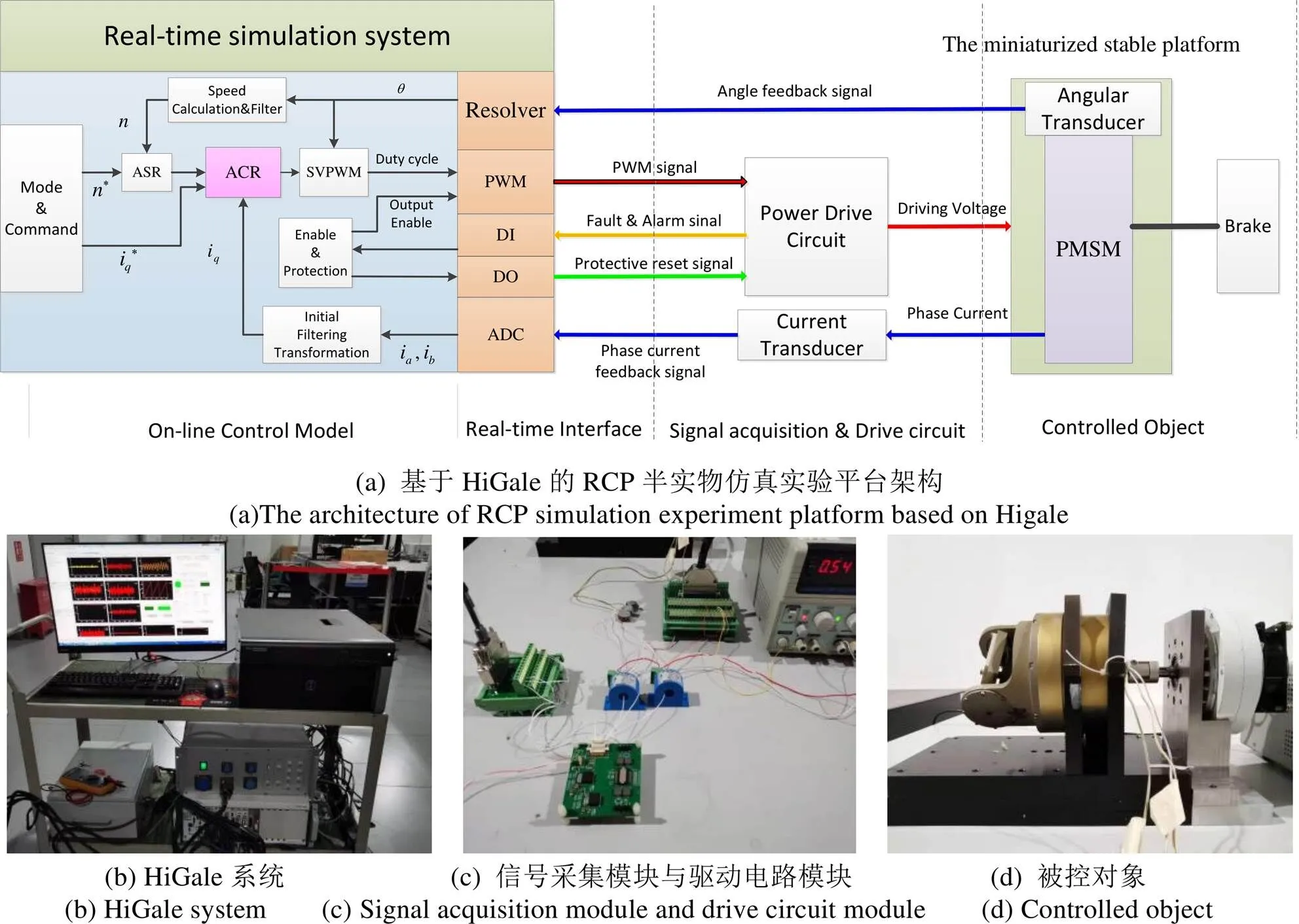
图12 快速控制原型半实物仿真实验平台架构与实物图
实验步骤如下:
步骤一,基于电流环的阶跃响应,对比两种控制器作用的电流响应时间和稳态精度。电流阶跃给定值设定为2A,以直观的电机转速变化控制实验的启停。
步骤二,搭建速度环(相同控制器类型和控制参数),形成速度+电流双闭环回路,对照观察两种电流控制方法对于小惯量稳定平台在速度跟随性和速度抗扰性上的作用。譬如,速度环控制器参数统一设定为pn=8,in=0.4。
由于小惯量稳定平台在高速和低速下自身系统干扰力矩的主因会发生变化,因此,速度跟随性实验和速度抗扰性实验需分别在高速和低速下进行验证,例:低转速1r/min和高转速60r/min。
3.2.1 电流环响应性能对比
图13表示基于两种电流控制方法的q轴电流阶跃响应曲线和稳态误差曲线。从图13(a)可以看出,相对PI电流控制,复合电流控制能够改善电流环响应的动态性能,调节时间缩短约1/3,与图7仿真结果一致。对比图13(b)、(c)可知,复合电流控制方法能够优化电流响应的稳态精度。受电流传感器精度和反馈噪声等因素影响,电流稳态精度优化程度虽未达到仿真结果中一个数量级,但也明显提升约3/5。
3.2.2 速度环跟随性能对比
图14、15分别表示低速和高速条件下基于两种电流控制方法内环作用的速度环阶跃响应曲线及速度稳态误差曲线。综合比较图14和图15,无论处于低转速或是高转速,复合电流控制方法比PI控制器更能降低速度跟踪误差。由表2可知,比起PI控制器,复合电流控制方法的响应滞后时间缩短约1/2,调节时间缩短约1/3。
实验结果表明,复合电流控制方法能有效地改善速度环的速度跟随性能。
3.2.3 速度环抗扰性能对比
通过磁粉制动器施加与仿真实验相同的扰动力矩(幅值0.25Nm,频率5Hz),基于两种电流控制方法内环作用的速度环抗扰动响应曲线如图16所示。为保证受扰后系统的稳定性,PI型电流控制中也引入了ESO前馈补偿,速度响应使用n_PIE标识。具体指标对比见表3。
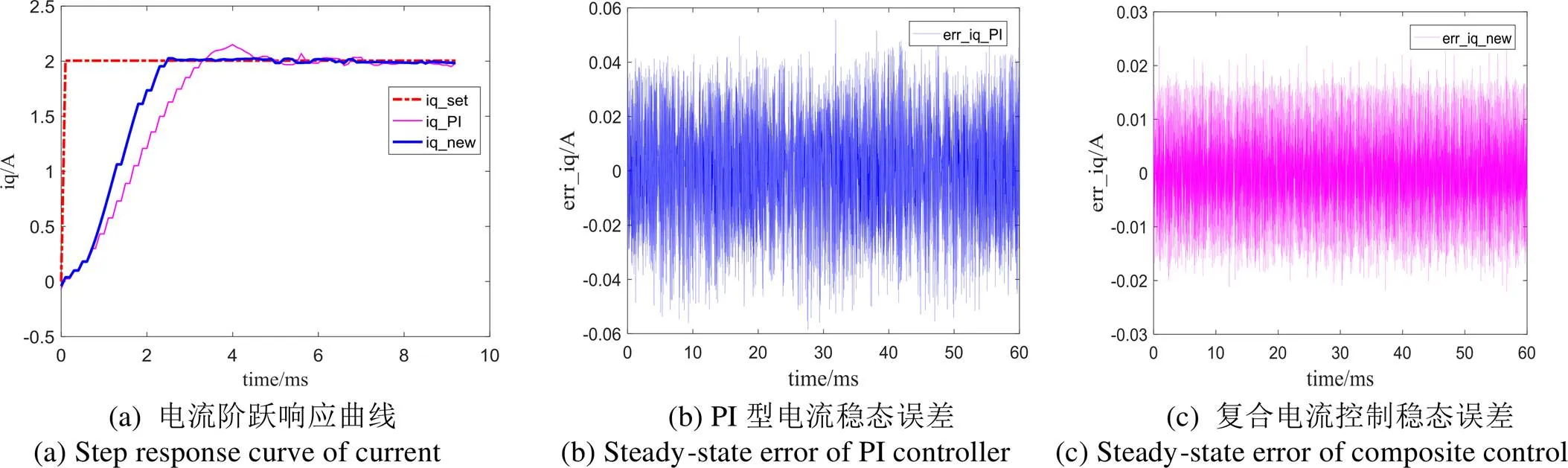
图13 两种电流控制方法的q轴电流响应性能对比
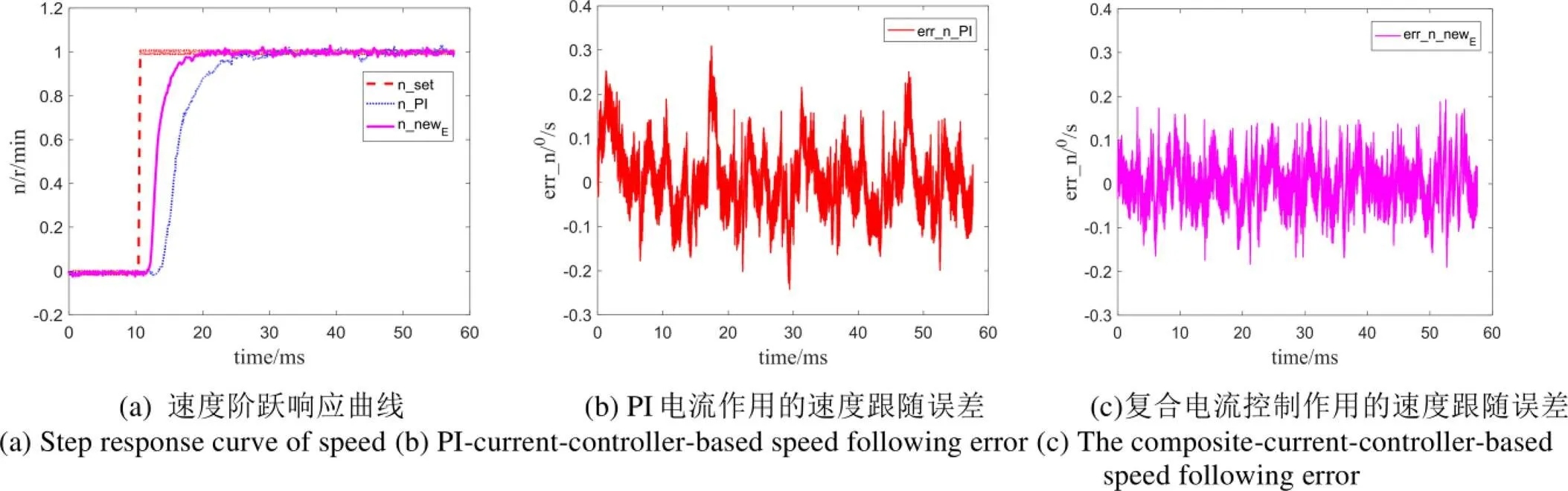
图14 基于两种电流控制方法作用的低速阶跃响应曲线
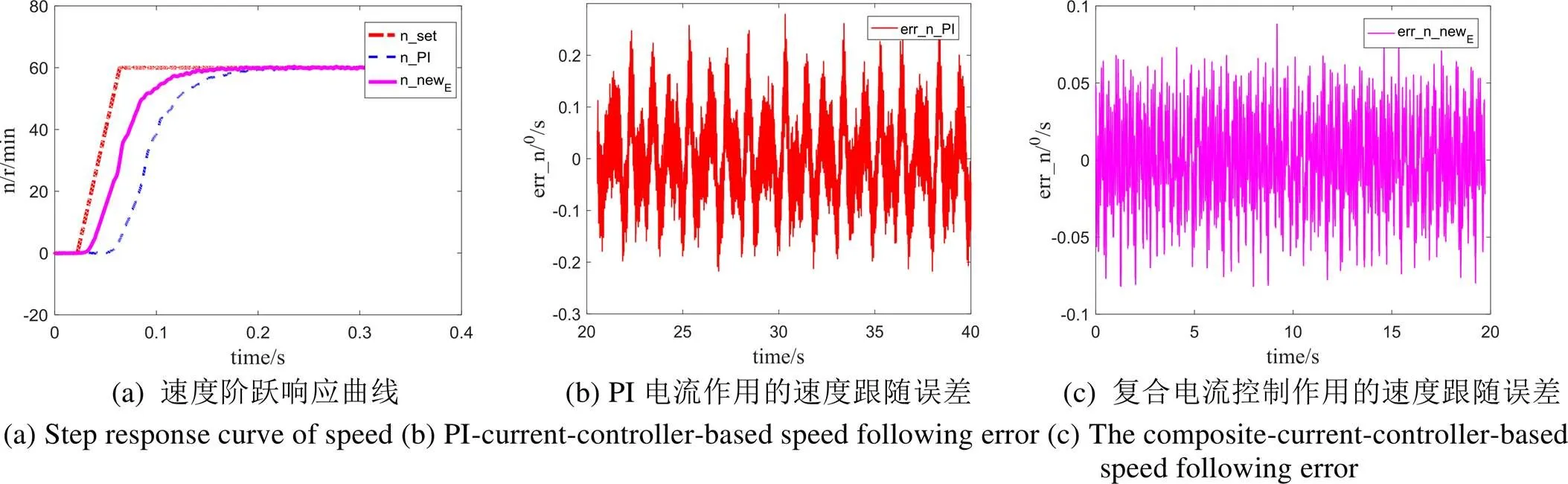
图15 基于两种电流控制方法作用的高速阶跃响应曲线
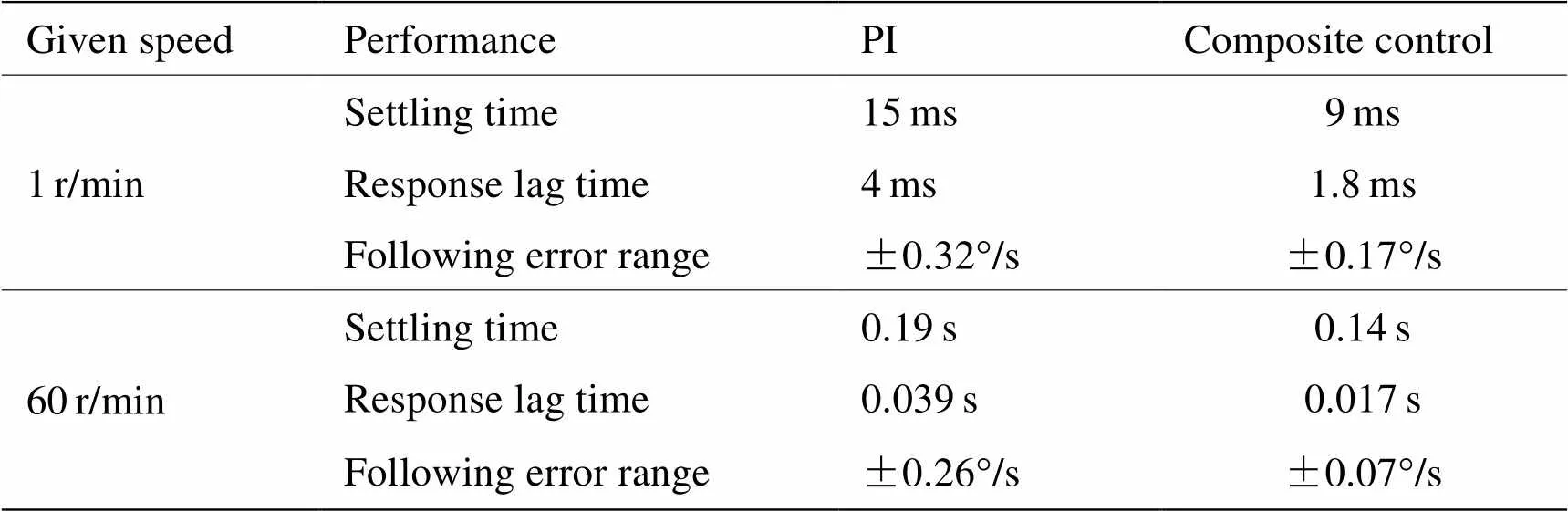
表2 基于两种电流控制方法作用的速度跟随对比
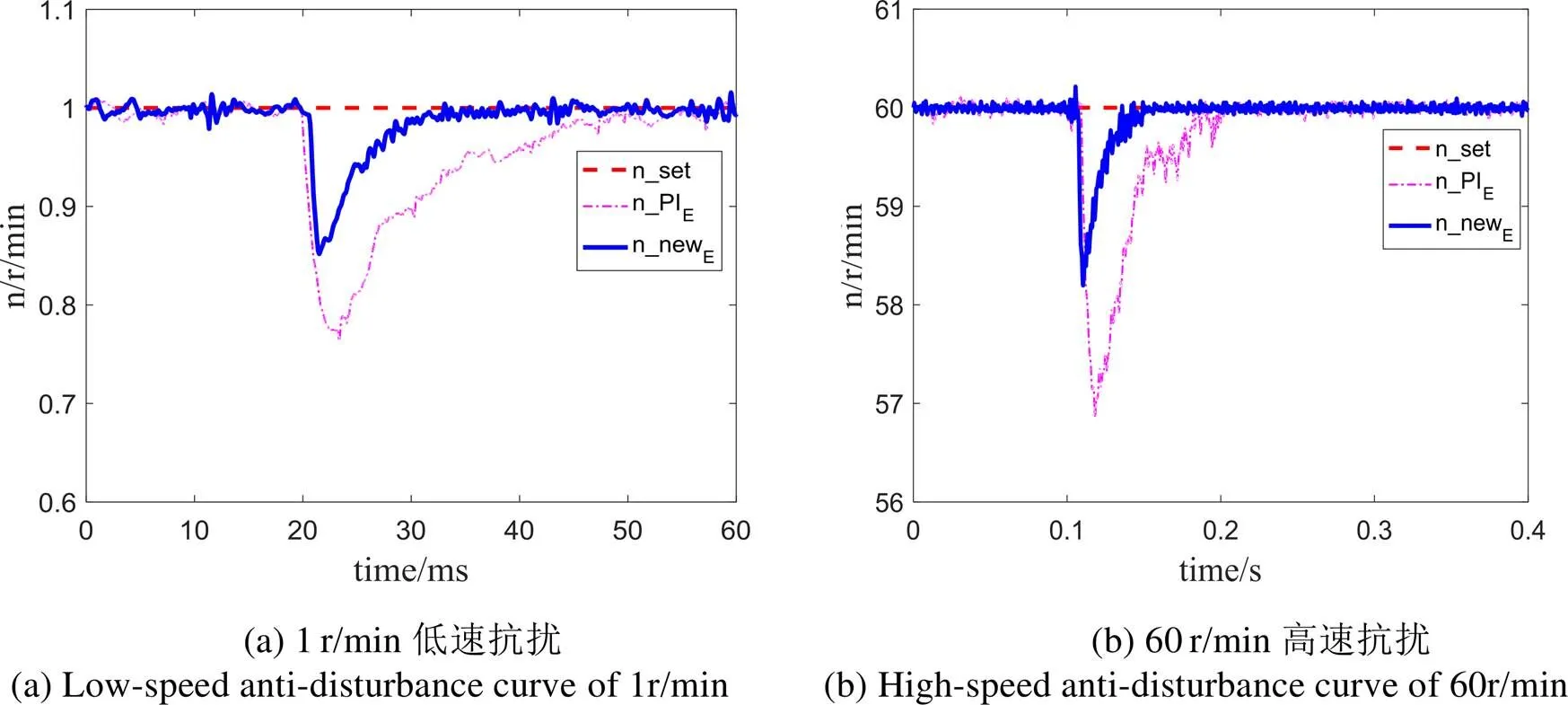
图16 基于不同电流控制方法作用的速度环抗扰动响应曲线
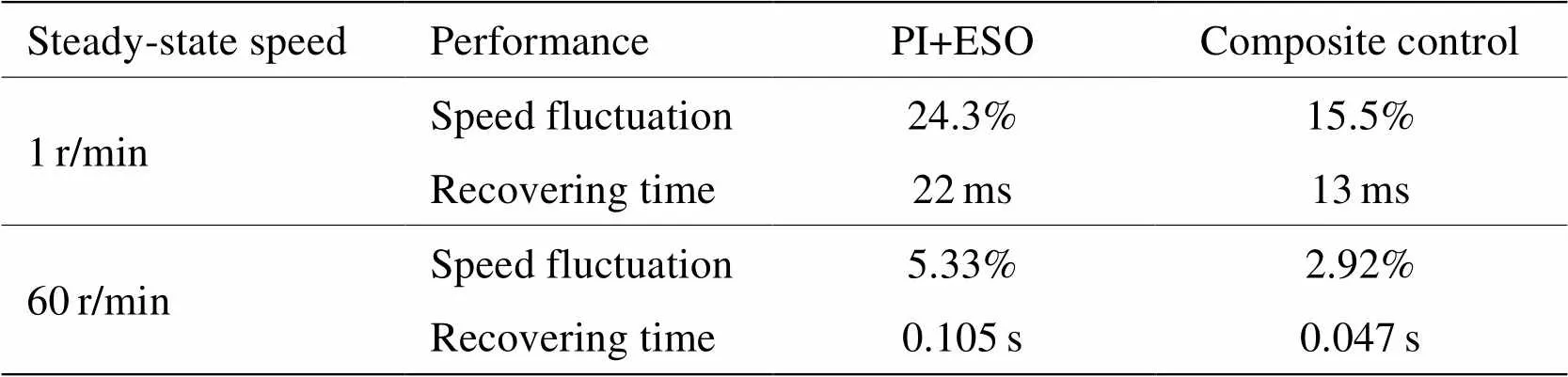
表3 不同电流控制方法作用的速度环抗扰性能对比
由图16和表3可以看出:低转速条件下,复合电流控制作用的速度环受扰动态降落减少为PI控制方法的5/8,恢复时间缩短为2/3;高转速条件下,复合电流控制作用的速度环受扰动态降落减少为将近PI控制方法的5/9,恢复时间缩短为1/2。
由此可知,复合电流控制方法能明显提升速度环的速度抗扰性能。
4 结论
为满足小惯量红外稳定平台高响应动态和强抗扰动能力的性能需求,本文提出了基于无差拍预测和扩张状态观测的复合电流控制方法。相比PI控制,该电流控制方法使得电流环控制具备较快的响应速度和较高的稳定精度,q轴电流阶跃响应调节时间缩短约1/3。另外,该电流控制方法能够优化速度外环的跟随性和抗扰动性能,不仅降低了速度外环的速度跟踪误差,而且减小了因外界扰动引入的速度动态降落,明显提高了速度外环的控制效果。同时,通过仿真实验表明,该技术对控制系统的鲁棒性也有较好的改善作用,能够避免因参数摄动等导致的系统性能下降。由此,实现了小惯量红外稳定平台高动态和高平稳的探测器视轴指向控制性能。
[1] 白晓利. 导引头稳定平台伺服控制系统设计与研究[D]. 北京: 北京理工大学, 2017.
BAI Xiaoli. Design and Research of Servo Control System for Seeker Stable Platform[D]. Beijing: Beijing Institute of Technology, 2017.
[2] 李锐华, 林宇. 小型红外成像制导稳定平台控制算法研究[J].红外技术, 2014, 36(2):142-147.
LI Ruihua, LIN Yu. Research on the control algorithm of lightweight infrared imaging guidance platform[J]., 2014, 36(2): 142-147.
[3] 王伟华, 肖曦. 永磁同步电机高动态响应电流控制方法研究[J].中国电机工程学报, 2013, 33(21): 117-123.
WANG Weihua,Xiao Xi. Research on current control method of permanent magnet synchronous motor with high dynamic response[J]., 2013, 33(21): 117-123.
[4] 牛里, 杨明, 刘可述, 等. 永磁同步电机电流预测控制算法[J].中国电机工程学报, 2012, 32(6):131-137.
NIU Li,YANG Ming,LIU Keshu,et al. Current predictive control algorithm for permanent magnet synchronous motor[J]., 2012, 32(6): 131-137.
[5] 孔德杰.机载光电平台扰动力矩抑制和改善研究[D]. 长春: 中国科学院长春光学机密机械与物理研究所, 2013.
KONG Dejie. Restraints and Improvement of Disturbance Torque of Airborne Optoelectronic Olatform[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Science, China, 2013.
[6] 蒋学程, 彭侠夫. 小转动惯量PMSM电流环二自由度内模控制[J].电机与控制学报, 2011, 15(8):69-74.
JIANG Xuecheng, PENG Xiafu. Two-degree-freedom internal model control for current loop of small rotational inertia PMSM[J]., 2011, 15(8): 69-74.
[7] 杨明, 牛里, 王宏佳, 等. 微小转动惯量永磁同步电机电流环动态特性的研究[J].电机与控制学报, 2009, 13(6):844-849.
YANG Ming, NIU Li, WANG Hongjia, et al. Research on dynamic response of the current loop for PMSM with small inertia[J]., 2009,13(6): 844-849.
[8] 王宏佳. 微小型高性能永磁交流伺服系统研究[D]. 哈尔滨: 哈尔滨工业大学, 2012.
WANG Hongjia. Research on Minitype High Performance PM AC Servo System[D]. Harbin: Harbin Institute of Technology, 2012.
[9] 刘红伟. 永磁同步电机控制策略及算法融合研究[D]. 成都: 中国科学院光电技术研究所, 2014.
LIU Hongwei. Research on the Control Strategies and Their Syncretized Algorithm for Permanent Magnet Synchronous Motor[D]. Chengdu: The Institute of Optics and Electronics, Chinese Academy of Science, 2014.
[10] 阮毅, 陈伯时.电力拖动自动控制系统——运动控制系统[M].4版: 北京: 机械工业出版社, 2009.
RUAN Yi, CHEN Boshi.[M]. 4th Edition: Beijing: China Machine Press, 2009.
[11] Florent Morel, Xuefang Lin-Shi, Jean-Marie Rétif, et al. A comparative study of predictive current control schemes for a permanent-magnet synchronous machine drive[J]., 2009, 56(7): 2715- 2728.
[12] Turker Turker, Umit Buyukkeles, A.Faruk Bakan. A robust predictive current controller for PMSM drives[J]., 2016, 63(6): 3906-3914.
[13] 王宏佳, 徐殿国, 杨明. 永磁同步电机改进无差拍电流预测控制[J].电工技术学报, 2011, 26(6):39-45.
WANG Hongjia, XU Diangguo, YANG Ming. Improved deadbeat predictive current control strategy of permanent magnet motor drives[J]., 2011, 26(6): 39-45.
[14] CHEN Wenhua, YANG Jun, GUO Lei, et al. Disturbance-observer-based control and related methods—an overview[J]., 2016, 63(2): 1083-1095.
[15] 张海洋, 许海平, 方程, 等. 基于负载转矩观测器的直驱式永磁同步电机新型速度控制器设计[J].电工技术学报, 2018,33(13):2923-2934.
ZHANG Haiyang, XU Haiping, FANG Chen, et al. Design of a novel speed controller for direct-drive permanent magnet synchronous motor based on load torque observer[J]., 2018, 33(13): 2923-2934.
[16] 刘旭东, 李珂, 孙静, 等. 基于广义预测控制和扩展状态观测器的永磁同步电机控制[J].控制理论与应用, 2015, 32(12):1613-1619.
LIU Xudong, LI Ke, SUN Jing, et al. Generalized predictive control based on extended state observer for permanent magnet synchronous motor system[J]., 2015, 32(12): 1613-1619.
Composite Current Control Method for Small Inertia Infrared Stable Platforms
XIONG Hui,LIN Yu,ZHANG Yanwei,LI Ruihua,SHU Junyi,YAN Xinjie,FENG Jianwei
(Kunming Institute of Physics, Kunming 650223, China)
Miniaturization and high dynamics are the development trends of infrared imaging stabilization platform technology. Owing to a small moment of inertia, traditional PI(Proportion Integral)-type current loop control cannot completely overcome the slope interference of the back electromotive force(back-EMF), which will reduce the dynamic response of small inertia infrared stable platforms. Concurrently, balancing dynamics and anti-disturbance performance is another difficulty with regard to high dynamic and small inertia infrared stable platform technology. To solve the a forenoted problems, a composite current control method based on dead-beat predictive control and extended state observation(ESO) is proposed in this paper, which effectively improves the dynamic response and anti-disturbance ability of small inertia infrared stable platforms. Simulation and experimental results show that the composite current control method reduces the settling time of the current loop of a small inertia infrared stable platform by 1/3. It also improves the dynamic performance and anti-disturbance performance of the speed response, and has good performance robustness.
infrared stable platform,small moment of inertia,current loop,composite control
TP271.4
A
1001-8891(2021)02-0116-11
2020-12-21;
2021-01-06.
熊辉(1991-),男,硕士研究生,主要研究方向为无刷直流电机的伺服控制与驱动。E-mail:xh1270223693@163.com。
林宇(1972-),男,研究员级高级工程师,博士生导师,主要研究方向为光电系统。E-mail:lwlinyu@163.com。