局部纹理特征改进空闲车位智能检测算法
2021-03-05张一杨姚明林
张一杨,姚明林
(唐山学院,河北 唐山 063000)
1 引言
近年来,车辆数量爆炸式增长,但智能停车场内依靠简单的车位数量增加并不能解决车辆增长带来的停车难放问题,为此,空闲车位的自动检测并引导自动泊车以充分利用现有车位,成为智能停车场的发展方向,也是现代城市发展的主要方向[1]。随着视频监控系统的普及和计算机视觉技术的发展,越来越多的视频监控系统正用于目标检测和识别,基于此,利用停车场的视频监控系统实现空闲车位的自动检测成为了智能城市研究的热点问题[2-3]。
对于利用视频监控系统实现空闲车位检测,国内外学者提出了多种方案。文献[4]提出了一种综合了图像方差、相关度和边缘点密度的空闲车位检测特征向量,并测试了基于优先级判别、Fisher 判别和贝叶斯判别的车位检测性能,但对于多车位情况未验证。文献[5]提出了一种基于KL 变换和核Fisher 判别的空闲车位检测方法,该方法基于KL 变换提取特征向量,利用核Fisher判别的优良非线性检测能力实现了空闲车位检测。文献[6]将车位图像的纹理特征作为检测描述符进行了验证,并用于空闲车位的检测,其使用局部LBP 和局部LPQ 作为描述符,取得较好的车位检测效果;文献[7]提出了一种基于平面三维场景的停车场车位检测方法,该方法检测准确率很好,但系统过于复杂,难以实现。文献[8]利用灰度图像进行识别,并成功测试了基于直方图的极大值和带宽两种检测算法,算法简单,对图像质量要求不高,可以充分利用现在监控摄像机,但其对于车位中出现人等干扰物体时的检测鲁棒性不高;文献[9]根据停车位上布置的辅助图作为识别特征,根据辅助图即使在光照及阴影下仍存在的特征不变性,通过逐像素扫描和模式匹配进行空闲车位的自动检测,算法所需要的存储量较少,对恶劣环境具有较好的适应性,但其布置工作量大,且辅助图易被遮挡。
在已有研究基础上,提出了基于局部二值(LocalBinaryPattern,LBP)空间纹理特征的智能停车场空闲车位自动检测算法,算法提取局部二值空间纹理特征向量,并采用高斯径向基核函数将特征向量映射至新的特征空间,然后基于Fisher 判别准则实现空闲车位检测。
2 图像预处理
从视频监控系统朋多输出的是彩色RGB 图像,直接处理会带来非常大运算负担。此外,在图像采集和传输的过程中会不可避免地受到噪声的影响,这些噪声包括高斯噪声和椒盐噪声。其中高斯噪声是图像中随机分布的噪声,是任何图像分析与处理过程中均存在的;而椒盐噪声是由在图像采集、传输、解码等过程中产生的噪声,在图像中表现为黑白相间的亮点。并且停车场视频采集设备输出的图像同时包含多个车位,需要进行图像切割,这同样会产生椒盐噪声,从而破坏图像质量,对车位检测产生不利影响。
因此,在进行车位图像特征提取与检测之前,需要对停车场视频设备采集的图像进行预处理。预处理内容包括图像分割、灰度变换和滤波。文中将RGB 图像灰度化为256 级,采用改进中值滤波方法去除图像噪声[8]。
3 空间纹理直方图
纹理特征反应了一幅图像的同质现象,体现了图像的结构组织排列属性。图像的纹理特征包含了图像的灰度分布、边缘分布以及频域分布,其主要功能之一就是进行图像判别。图像不但包括纹理信息,还包含有空间结构信息。结构信息也是实现图像判别的重要特征之一。因此,文中提出采用综合了纹理特征和结构特征的空间纹理直方图特征进行车位图像检测。
3.1 特征提取
文献[5]最先开始了图像纹理特征研究,目前其提取方法可以分为以下几类:基于统计的特征、基于结构的特征、基于几何的特征和基于信号处理的特征。采用的纹理特征是基于局部二值模式提取的。LBP 最先被文献[9]提出后广泛应用于各种基于纹理的分类识别场合,例如人脸识别、高光谱图像分析、SAR 图像分割。
LBP 图像纹理特征提取的基本原理是:定义某一像素为中心像素,以中心像素的灰度值对其邻域像素进行二值化处理得出二值序列,对中心像素的邻域像素进行二进制编码,二值序列与二进制编码对应相乘后相加可得中心像素的LBP 值。
设中心像素的灰度值为g0,邻域为3×3 的矩形,中心像素的邻域像素的灰度值可以表示为gi(i=1,2,L,8)。将中心像素与邻域像素的灰度值进行比较,得出一个二值序列:

则中心像素点的LBP 模式为:

基于LBP 的纹理特征提取过程,如图1 所示。
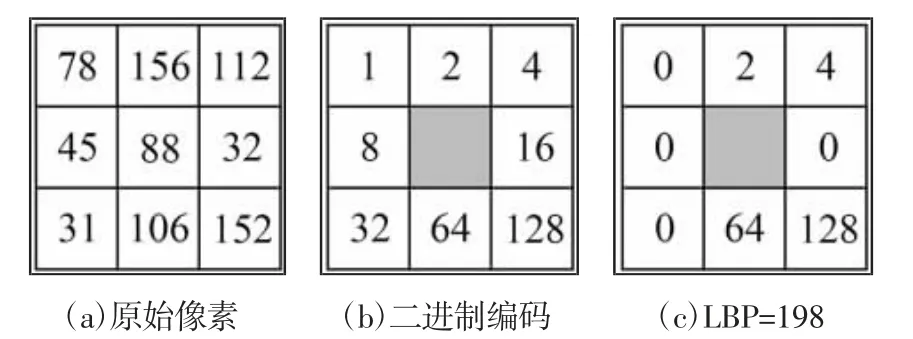
图1 LBP 纹理特征值Fig.1 LBP Texture Eigenvalue
对于一幅图像,重复图1 过程,即可得出图像中所有像素点的LBP 模式。计算出所有像素点的LBP 值,灰度图像就转化为LBP 图像了。考虑到直方图计算代价较小,且具有图像平移、旋转、缩放不变性等众多优点,计算LBP 图像的直方图作为车位检测的特征。有车图像和两幅空闲图像的LBP 直方图,如图2 所示。
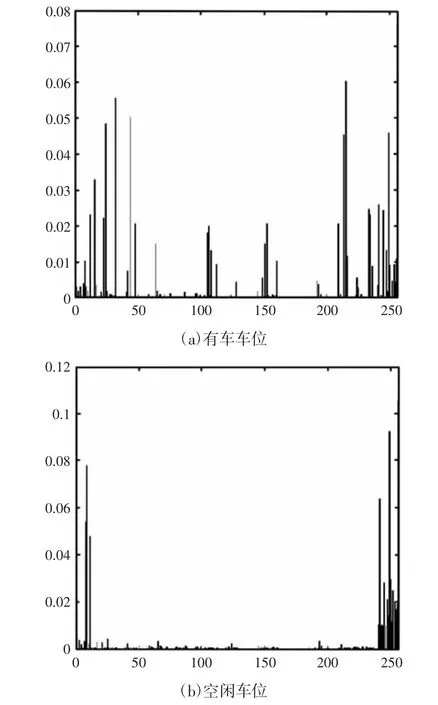
图2 LBP 图像直方图Fig.2 LBP Image Histogram
由图2 可知,LBP 图像的直方图能够很好的刻画出车位图像特征,有车车位图像和空闲车位图像之间具有较大差异。
为增强检测准确性,采用融合了结构信息的空间LBP 图像直方图(简称为空间纹理直方图)作为识别特征,空间纹理直方图能够有效描述图像的局部纹理信息,对空闲车位的检测更具鲁棒性。在空闲车位检测过程中,定义结构模板为矩形模板,即图像中的矩形区域,记为r(x,y,w,h),其中x,y 规定了结构模板的位置,w,h 规定了目标的大小,结构模板覆盖区域的LBP 图像直方图为Hr(x,y,w,h)。
3.2 特征分析

图3 表明,空闲与有车的车位图像具有良好的可区分性。但单一的结构模板的空间直方图特征检测性能不是十分理想,为此构造了结构模板集,记模板集中任意LBP 图像直方图为Hr(xp,yp,wp,hp),设共有m 个结构模板,则可以得到m 个空间直方图Hr(xp,yp,wp,hp)(p=1,2,…,m)。
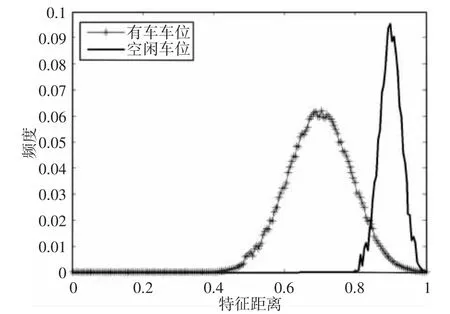
图3 空间直方图特征对比Fig.3 Spatial Histogram Feature Comparison
采用直方图相交法作为检测特征。设H1(k)和H2(k)为LBP直方图,其中k 表示灰度离散值,k=(0,1,…,255),则直方图相交度量值为:

其中,p=1,2,…,m,提取出检测特征后,作为核Fisher 判别方法的输入,利用核Fisher 判别实现空闲车位检测。
4 核Fisher 判别
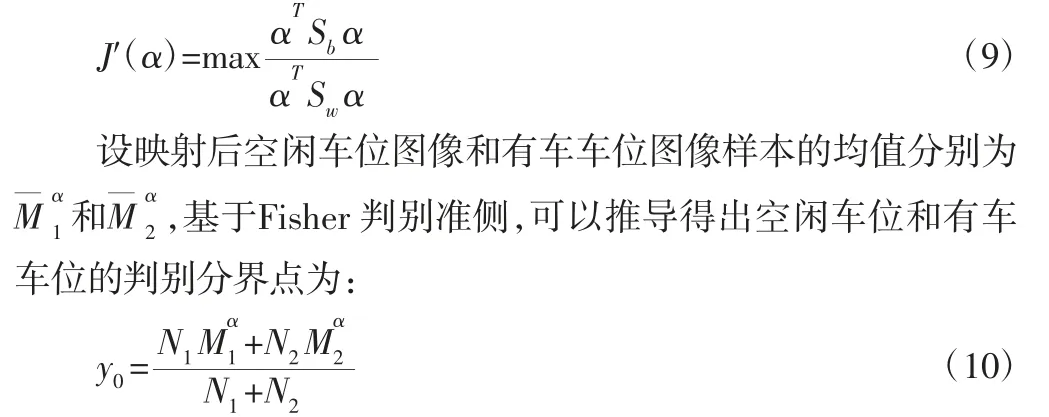
核Fisher 判别基于一个非线性函数将特征参数映射至新的特征空间,在新特征空间中实现目标判别[5]。下面以空闲车位检测为例,简要说明核Fisher 判别的过程。设N 个测试样本x1,x2,…,xN,其中N1个空闲车位图像样本,N2个有车车位图像样本,分别记为Hb1和Hb2。空闲车位图像和有车车位图像样本的均值可以表示为:

则两类样本的类间分离度和类内总分离度分别为:

为了获取优良的分类性能,希望特征空间中,样本类间分离度Sb越大越好,同时要求样本类内总分离度Sw越小越好。Fisher判别准则目标函数为:

核Fisher 利用非线性函数核函数将特征空间映射至新特征空间,设核函数投影直线方向为α,则映射后目标函数为:
实现非线性映射的核函数很多,但必须满足Mercer 定理的要求。常用的核Fisher 判别核函数有高斯径向基核函数、多项式核函数和双曲正切核函数。通过仿真实验测试,文中选取高斯径向基核函数进行空闲车位检测。
5 实验结果
在实验中,采集了不同时间、天气、光照以及有阴影和积水的停车场视频监控图像500 幅作为训练样本集,将图像传化为LBP 图像,并构造结构模板集,按照结构模板集,提取出空间直方图特征。经过大量仿真实验,确定的模板集,如图4 所示。图中白色部分代表结构模板。
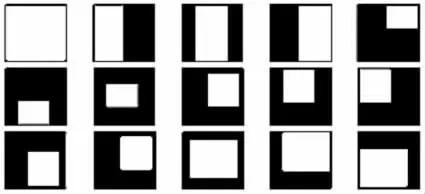
图4 结构模板集Fig.4 Structure Template Set
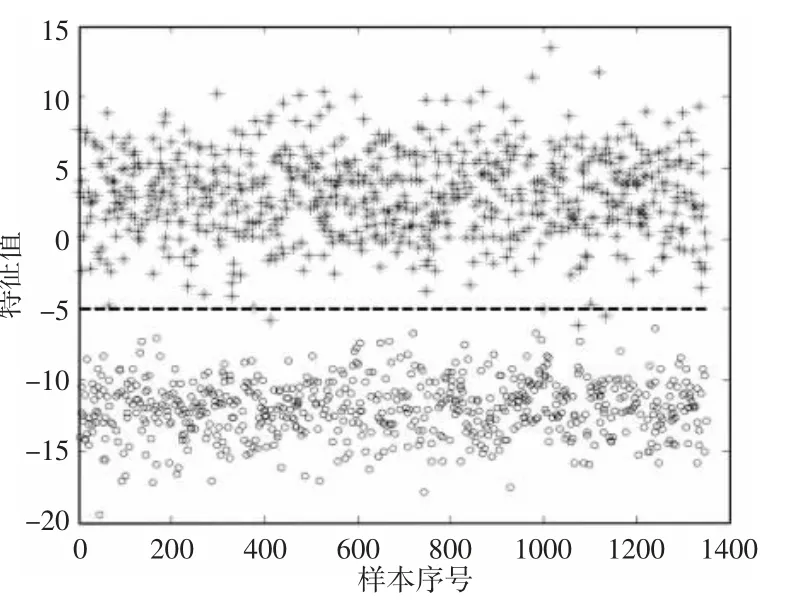
图5 核Fisher 判别散点图Fig.5 Nuclear Fisher Discriminant Scatter Plot
为测试空闲车位检测性能,选取实际视频系统采集的1350幅车位图像作为测试样本集,包含700 幅空闲车位图像和650 幅有车车位图像。与训练样本集一样,提取出测试样本集的空间纹理直方图特征,并计算出车位检测特征向量fp,对fp利用高斯径向基核函数进行非线性映射。
1350 幅测试图像在Fisher 判别最优投影直线方向上的投影,其中横轴为样本序号,纵轴为投影后的特征值,符号“*”和“○”分别表示空闲车位和有车车位特征向量的投影值,虚线表示Fisher 判别分界线,如图6 所示。由图5 可知,空间纹理直方图特征经过高斯径向基核函数投影后,在新的特征空间具有良好的类间分离性。
为进一步验证基于空间纹理直方图特征的车位检测性能,在同等实验条件下,将文中算法与视频图像多特征贝叶斯识别算法(简记为By-R)[4]、基于KL 变换Fisher 判别方法(简记为KLF)[5]和基于深度学习检测方法(简记为DL)[10]行对比分析,检测结果统计,如表1 所示。其中Pa代表空闲车位正确检测的概率,Pb代表有车车位错误检测为空闲车位的概率,Pc代表总体的正确检测概率。
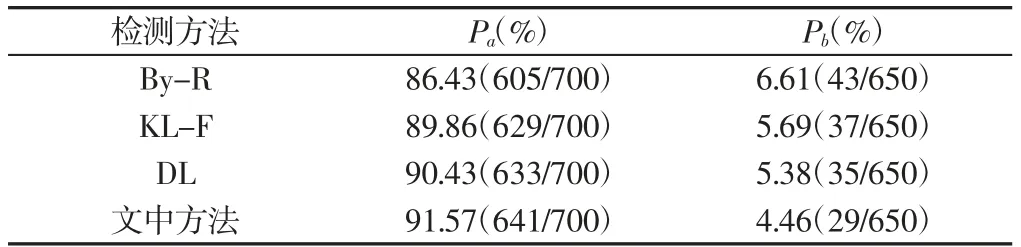
表1 不同判别函数下空闲车位检测结果Tab.1 Idle Parking Position Detection Under Different Discriminant Functions
实验结果表明,文中提出的基于空间纹理直方图特征的车位检测方法性能优于视频图像多特征贝叶斯识别算法和KL 变换Fisher 判别方法。这是因为空间纹理直方图特征同时反映了图像的纹理信息和结构信息,纹理特征与目标类别的关联性最强,能够有效描述车位信息,而结构信息刻画了车位图像的局部特征,使得车位图像受到光照、遮挡、积水等因素影响时能够保持特征稳定性。
6 总结
提出了一种新的停车场空闲车位自动检测方法,首先提取车位图像的空间纹理直方图特征,然后利用核Fisher 判别实现空闲车位检测。理论分析和实验结果表明,空间纹理直方图特征能够有效区分空闲车位图像和有车车位图像,对空闲车位具有很好的检测概率,为智能化停车场的车位自动检测系统提供了一种新方法。
