模糊分数阶滑模控制的BLDCM 控制系统
2021-03-05金鹏
金 鹏
(辽宁工程职业学院,辽宁 铁岭 112008)
1 引言
无刷直流电动机(BLDCM)具有调速快、起动转矩大、运行稳、高精度等优点。因此,近年来在汽车、航空、工业工控、机器人、家用电器等行业应用得越来越广泛[1]。但BLDCM 是一个多变量、非线性、强耦合、时变的系统[1],难以建立精确模型,普通PID 控制或改进的智能PID 控制都必须以精确建模为基础,并且智能混合型PID 算法往往编程复杂、参数调节难度大,在实际的工程应用中,往往得不到广泛推广。
滑模控制(Sliding model control,SMC)设计简单、调节参数少,能够克服非线性系统的不确定性,对外界扰动具有良好的鲁棒性和完全的自适应性,近年来在电机控制中得到广泛应用[2]。但滑模控制最大的缺点就是控制器的输出具有抖振、稳态误差较大。为削弱输出抖振,一些学者提出改进算法,如Terminal 滑模控制、模糊滑模控制、状态观测器方法、高阶滑模控制等。但这些算法都存在着各种不足,如Terminal 滑模控制必须参数精确,否则容易出现奇异问题[2];模糊滑模控制无需设计精确的控制率,但控制精度不高[2];状态观测器在减弱抖振的同时,也降低了系统的鲁棒性[3-4];高阶滑模控制器的设计较为复杂,不便于推广应用[5-6]。
基于分数阶系统传递能量缓慢及收敛特性,提出设计一种模糊分数阶滑模控制器,通过在滑模切换函数中加入分数阶微积分算子,减弱控制器的输出抖振,并利用模糊算法对滑模切换项ε 进行在线自整定。仿真及实验结果都证明所提方法不但使系统具备很强的速度跟踪性、鲁棒性,而且可以有效削弱抖振,提高了系统的动静态性能。
2 BLDCM 数学模型
如果BLDCM 处于两相导通的星型三相六状态下,电机的反电动势波形为近似梯形波,不计电机损耗及电枢反应对气隙磁场的影响,三相绕组完全对称,则BLDCM 三相绕组的电压平衡方程可以表示为[7]:

式中:ua、ub、uc—绕组各相电压;ia、ib、ic—相电压分别为绕组各相电流;ea、eb、ec—绕组各向反电动势;r—绕组各向电阻;L、M—绕组各相自感和每两相绕组间的互感;D—微分算子[7]。
若将整个无刷直流电机看作一个整体,则BLDCM 的电压平衡方程可简化为[7]:

式中:u—电枢电压;i—电枢电流;r0—相电阻;L0—相电感;ke—反电动势系数;ω—电机转速。由于电机两相同时导通,所以r0=2r,L0=2(L-M)[7]。
转矩平衡方程为[7]:

式中:Te—电磁转矩;TL—负载转矩;J—转动惯量;B—粘滞摩擦系数;kt—转矩系数[7]。
设系统状态变量为:

其中,由式(2)~式(5)得系统状态方程为:

其中,a=(r0J+BL0)/L0J,b=(Br0+kekt)/L0J,c=kt/L0J,d=(Br0+kekt)ωr/L0J+r0Tl/L0J。
3 模糊分数阶滑模控制器设计
3.1 分数阶控制器设计
由于滑模控制器难以克服抖振的缺点,其产生的抖振是由控制作用在滑模面的高频高速切换引起的。对其进行改进,设计分数阶滑模控制器,设计分为两个步骤,即分数阶切换函数的选取和控制率的设计。利用分数阶系统能量传递缓慢并收敛的特性,降低系统状态变量在滑模面的切换频率及切换速度,从而抑制抖振。
对整数阶切换函数进行改进,加入微积分算子,在忽略BLDCM 系统参数摄动及负载变化的情况下,设计切换函数为:


式中:λ—分数阶微积分阶次;R(λ)—λ 的实部。
选取指数趋近率为:

其中:k>0,ε>0;sgn(·)为符号函数,定义如下:

由式(6)、式(7)、式(9)设计分数阶滑模控制器的控制率为:

可见,式(11)的控制率中的符号函数经分数阶微积分后,弱化了在(-1)和1 间的频繁快速切换,使得控制器输出波动更小,进而系统的控制精度和灵活性更高。
3.2 模糊分数阶滑模控制器设计
由于滑模控制器的滑模切换项ε 的大小影响系统的抖振幅值,ε 过大,系统抖振较大,ε 过小,系统到到达稳态的时间过长[8]。如果将ε 设为定值,很难适应BLDCM 系统的非线性、实时性及突发扰动。这里,设计一种模糊控制算法来自适应整定ε。模糊控制算法以滑模面s 及其导数s˙作为模糊控制的输入,模糊输出△u的绝对值作为滑模切换项ε,即:


式中:kj—第j 个论域的中心值[8]。

表1 模糊控制规则表Tab.1 Fuzzy Control Rule Table
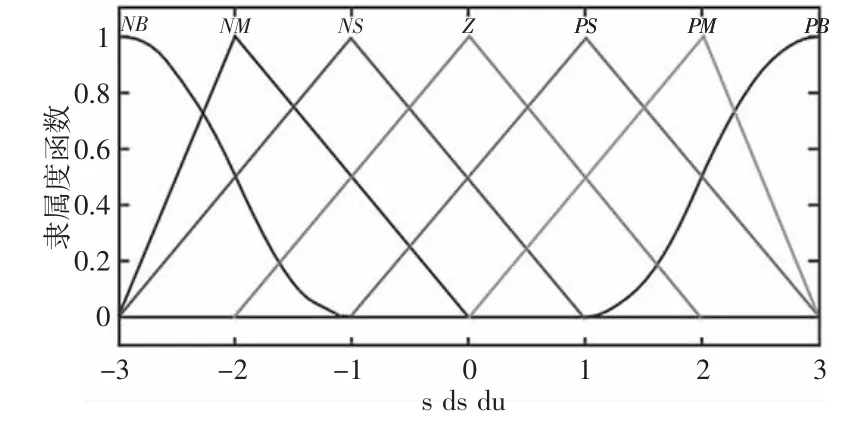
图1 隶属度函数Fig.1 Membership Function
4 分数阶滑模控制器稳定性分析
从前面分析可以看出,采用的矢量控制算法优点是无需推导系统精确模型,只需得到系统的状态方程,控制器的控制率随状态方程参数的变化自适应调节,具有较强鲁棒性。但控制器成立的必要条件是其稳定性成立。滑模控制的系统状态分为两部分,到达段和滑模段[8-9],其稳定性分析也由两部分组成,即滑模逼近条件分析和滑模存在条件分析。
4.1 滑模逼近条件
为验证分数阶滑模控制器的稳定性,选Lyapunov 函数为:


4.2 滑模存在条件
当系统处于滑模状态时,满足s=0,则:

由文献[10]可知,c>0,分数阶微分方程(16)的解收敛到零,即速度偏差e 收敛于零,系统满足滑模存在条件。
5 仿真及实验
5.1 仿真分析
为验证方法的有效性,分别将模糊分数阶滑模控制策略和模糊整数阶滑模控制策略应用于速度控制器,并通过Matlab 进行仿真对比分析,电机参数,如表2 所示。
表2 电机参数Tab.2 Motor Parameters
整数阶滑模控制器采用的切换函数和控制率分别为分数阶滑模控制器的特例(λ=1)。
仿真分析如下:
5.1.1 跟踪性对比
设定速度为nd=1000sin(5π)时,分数阶滑模控制器和整数阶滑模控制器的转速曲线,如图2、图3 所示。可以看出,电机启动时,两种控制器都存在不同程度的速度偏差,但分数阶控制器偏差更小,并能在更短时间内达到稳定跟踪。

图2 分数阶控制器转速跟踪曲线Fig.2 Speed Tracking Curve of Fractional Order Controller

图3 整数阶控制器转速跟踪曲线Fig.3 Speed Tracking Curve of Integer Order Controller
5.1.2 鲁棒性对比
当设定速度信号为阶跃信号step=2000 时,在0.2s 突加负载0.3N·m,分数阶滑模控制器和整数阶滑模控制器的速度响应对比曲线,如图4,图5 所示。电机空载运行时,分数阶滑模控制器和整数阶滑模控制器的切换函数曲线。
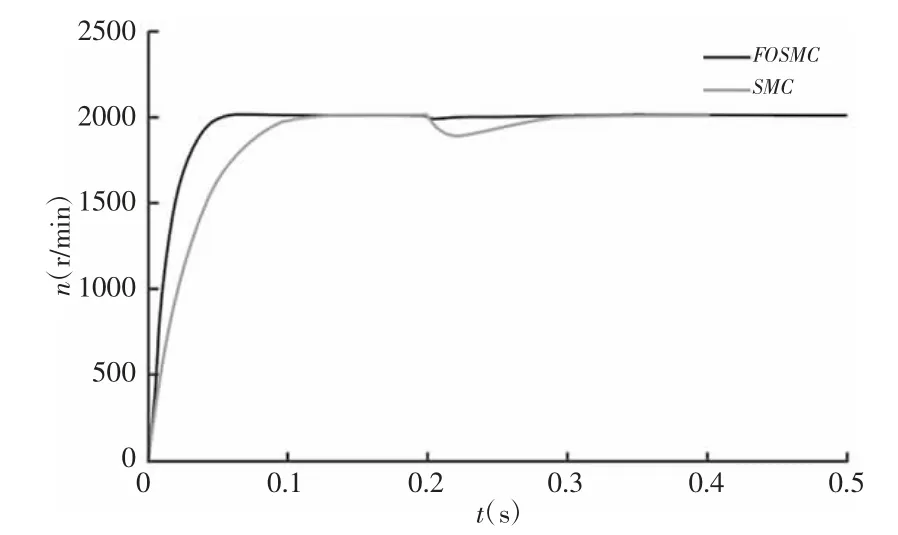
图4 两种滑模控制器的速度响应曲线Fig.4 Speed Response Curves of Two Sliding Mode Controllers

图5 两种滑模控制器的的切换函数曲线Fig.5 Switching Function Curves of Two Sliding Mode Controllers
分数阶滑模控制器动态响应更快,抗干扰能力更强,如图4所示。分数阶滑模控制器下,系统状态到达滑模面的时间更短,并且在滑模面附近的抖振幅值更小、抖振频率更小,更有效地削弱了系统抖振,如图5 所示。
5.2 实验分析
实验测试采用TMS320F28335 电机专用DSP 处理器作为无刷直流电动机的主控制器。实验时,给定速度为500r/min。施加负载转矩为0.2N·m。为与前面的仿真分析结果作直观对比,将实验数据以十进制导入Matlab,模糊分数阶滑模控制器和模糊整数阶滑模控制器实验结果,如图6~图7 所示。实验结果再次证明分数阶滑模控制系统具有更优越的动静态性能。

图6 分数阶滑模控制器速度响应Fig.6 Speed Response of Fractional Order Sliding Mode Controller
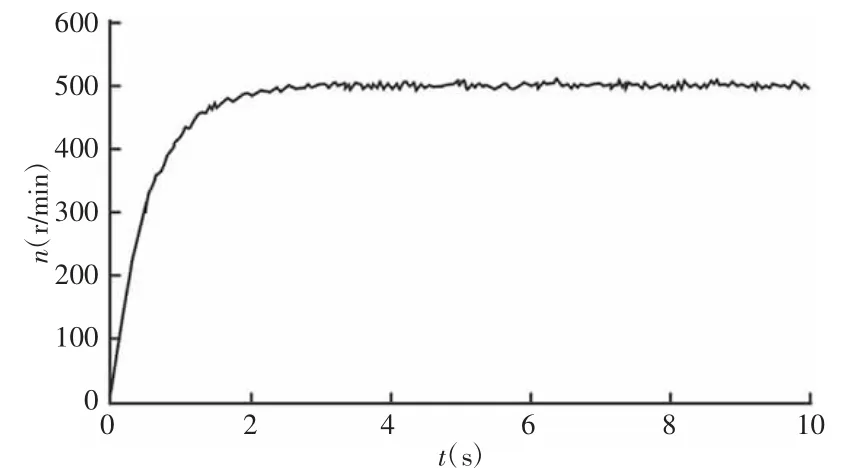
图7 整数阶滑模控制器速度响应Fig.7 Speed Response of Integer Order Sliding Mode Controller
6 结论
针对无刷直流电机整数阶滑膜控制器存在的稳态误差过大、精度不高等问题,提出一种模糊分数阶滑膜控制策略。首先,设计了基于分数阶微积分的滑模切换函数及滑模控制器;其次,利用模糊算法对滑模切换项ε 进行在线自整定,并通过Lyapunov 稳定性原理和分数阶微积分理论证明了系统的稳定性;最后,通过仿真及实验证明分数阶滑模控制器具有更好的速度跟踪性、鲁棒性,更小的稳态误差。实验还表明,引入分数阶微积分可以大大减弱滑模控制造成的抖振。
