双通道式车辆事故自动呼救系统的触发算法设计
2021-03-05张玉辰
苏 忆,陆 颖,张玉辰
(1.无锡商业职业技术学院,江苏 无锡 214153;2.江苏大学汽车与交通工程学院,江苏 镇江 212013)
1 引言
车辆事故自动呼救(Automatic Crash Notification,ACN)系统作为一项事故后安全技术,在人们乘车出行中扮演着重要角色[1]。现有的ACN 系统主要通过安全气囊点火信号触发[1],如通用的OnStar 系统,福特的SYNC 系统等。但是这种ACN 系统存在的主要问题是:ACN 系统是否触发依赖于安全气囊的可靠性,当安全气囊正确点火时,呼救系统才能正确触发。根据欧洲ECER94 法规,在乘员佩戴安全带时,汽车低于20km/h 速度正面碰撞固定壁障时安全气囊不应点火,大于30km/h 时必须点火,而在(20~30)km/h速度区间内不作要求,这个区间为传感灰度区[2],我国也参照欧洲的汽车安全法规。由于安全气囊在点火灰度区存在着较大的不触发率,导致该系统也存在不触发的情况,使得事故车辆无法发送碰撞信息量,为救援中心提供有效信息来预测乘员伤情,提前做出应对[3]。针对只由安全气囊点火信号触发的ACN 系统中存在的不触发问题,现有一些研究设计一个独立通道触发算法来识别灰度区间内发生的碰撞,灰度区之外仍由安全气囊点火算法控制[4],两者一并构成双通道式ACN 系统,从而利用这两个通道,综合地判断紧急呼叫系统是否触发。新的算法通道与安全气囊点火算法通道相结合,构成的双通道式ACN 系统可以大大减少呼救系统的不触发率。
国内外对于ACN 系统进行了大量的研究:文献[5]提出了一种基于智能手机的易于访问和便携的自动化事故检测系统,该系统利用加速度计、陀螺仪、麦克风等传感器的数据对汽车碰撞进行检测,以低成本实现,可作为高端昂贵系统的一种替代方案;文献[6]提出了一种将本地呼叫服务与车载通信网络的优势相结合的增强型紧急呼救系统eCall++,它由一个移动设备构成,通过车辆紧急呼救系统和车载通信标准自动检测事故并发送呼救信号,并通过实验验证了该系统的可行性;文献[7]提出了一种基于GPRS和车载导航仪的汽车紧急呼救系统,通过捕捉安全气囊点火信号和GPRS 模块获取定位并自动发出求救信号,实现了行车导航和紧急呼救一体化;文献[8]提出了基于双向加速度合成算法设计一种独立于安全气囊系统的车辆自动呼救系统碰撞事故触发算法,辅助安全气囊系统更准确地识别碰撞事故的发生。从现有研究来看,对于双通道的ACN 系统的研究还不多见。
因此,研究双通道式ACN 系统的触发算法对于降低自动呼救系统的不触发率,提高碰撞汽车乘员的生存率具有重要意义。首先提出双通道式ACN 系统的决策过程;对安全气囊通道和独立通道的触发算法先分别进行设计,随后提出双通道式ACN 系统的综合控制算法;通过台车试验对该算法的有效性进行验证。
2 双通道决策过程
所设计的双通道式ACN 系统由安全气囊通道控制算法和独立通道控制算法分别决策是否触发呼救信号,触发方案如图1,通道一是安全气囊通道,此通道由安全气囊点火算法识别灰度区间以外的碰撞,若其判断为应触发,信号A 就被输送到控制器中;通道二是独立通道,此通道由其他算法识别灰度区间内的碰撞,若其判断为应触发,信号B 就被送到控制器中。以上两通道的速度信号和加速度信号均由传感器模块中的各种传感器采集。双通道式ACN 系统的决策过程如下:
(1)感知车辆发生碰撞;
(2)传感器检测车辆碰撞时的车速,确定碰撞的速度区间:20km/h 以下;(20~30)km/h(灰度区间);30km/h 以上;
(3)根据碰撞的速度区间启动对应通道的算法;
(4)通道一或通道二控制算法若判断为应触发,信号A 或信号B 就被发送到控制器中,触发ACN 系统;若判断为不触发,信号A 或信号B 不被发送到控制器中,ACN 系统不触发。
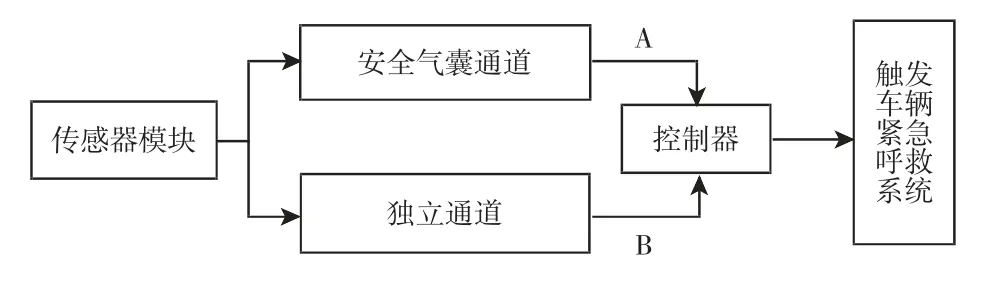
图1 双通道触发方案Fig.1 Dual Channel Triggering Scheme
3 安全气囊通道触发算法设计
3.1 比功率算法
安全气囊点火算法主要有加速度峰值法、加速度梯度法、移动窗积分法和比功率算法等。比功率算法综合考虑了加速度、速度变化量以及加速度梯度这三个碰撞参数,因此,比功率算法对各种碰撞都能比较好的适用[9]。假设汽车碰撞时的初速度为v0,碰撞过程中的速度变化量Δv 和实际车速vt由式(1)和式(2)得到:

则汽车在碰撞过程中产生动能E 为:

m 为车辆质量,则碰撞过程中产生的功率为:

求导得到比功率:

式中:J(t)—加速度梯度;v0J(t)—很小的量,计算过程中可忽略不计。为使比功率算法可以在不同质量的车辆上适用,将上式两边同时除以m,得到单位质量下的比功率:

3.2 阈值的确定
比功率算法需要对加速度、速度变化量和加速度梯度这三种参数进行实时计算,通过台车碰撞试验得到30km/h 速度下的碰撞加速度信号,碰撞加速度曲线,如图2 所示。使用前需进行滤波处理,碰撞过程中的速度变化量由式(1)积分计算得出,加速度梯度用式(7)向后差商近似替代:

利用比功率算法将30km/h 速度下的碰撞数据导入Matlab R2014b 程序中,得出碰撞过程中比功率的变化曲线,如图3 所示。将曲线中的峰值设为触发阈值,为45340m2/s4。

图2 碰撞加速度曲线Fig.2 Collision Acceleration Curve

图3 比功率曲线Fig.3 Specific Power Curve
4 独立通道触发算法设计
4.1 移动窗积分算法
独立通道采用和安全气囊点火类似的算法,移动窗积分法碰撞识别能力强,抗干扰性好,且算法结构简单,因此选用移动窗积分算法对独立通道触发算法进行设计[10]。算法原理,如图4 所示。[t0,tn]为窗宽w 内的初始积分区间,将该区间等分成n 个单位时间区间[t0,t1,……tn],对这n 个单位时间区间进行积分再求和得到窗宽w 内的积分值即速度变化量,移动窗沿时间轴向前推进,自动移入一个新的单位时间区间[tn,tn+1]进行积分,去除左边的区间[t0,t1]的积分值,窗宽w 的积分区间变为[t1,tn+1]。
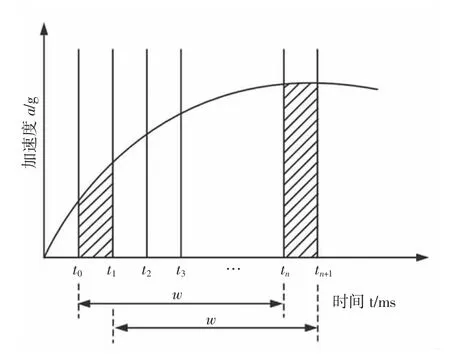
图4 移动窗积分算法原理Fig.4 Principle of Moving Window Integration Algorithm
首先需要确定窗宽w,然后对移动窗宽内的加速度信号不断积分,将移动窗内的积分值与设定的阈值进行比较,当积分值大于所设阈值时算法触发,否则就继续积分和比较,所用公式如下:

式中:w—窗宽;s(t,w)—移动窗内的积分值;a(t)—时间为t 时的加速度信号。为了便于计算将上式变形为:

式中:△V—移动窗内的速度变化量;△t—时间间隔,a(t1),…,a(tn)分别对应t1,…,tn时刻下的加速度值。
4.2 阈值的确定
独立通道阈值采用两层,分别为门槛阈值和触发阈值。门槛阈值的作用是过滤掉急刹车、路面颠簸等干扰并判断碰撞事故是否发生,在确定碰撞事故发生后,根据具体的算法计算速度变化量等特定参数然后与触发阈值比较,决定是否需要触发安全装置保护乘员。在普通路面条件下,只需要考虑减速杠和紧急制动的干扰,因此将门槛阈值设为2g[11]已经可以满足要求,门槛阈值过大,碰撞灵敏度反而越差。
触发阈值根据移动窗积分算法得出,首先需要选定窗宽,窗宽越大,算法灵敏度越低,本算法综合考虑了该灰度区间,并结合窗宽的特性,将移动窗积分算法的移动窗宽度选为8ms。通过台车碰撞试验得到20km/h 速度下的碰撞加速度信号,以8ms 的窗宽来进行移动积分,在整个移动窗内求得的△V 的最大值,就作为此独立通道的触发阈值,现将采集到的碰撞加速度数据导入Matlab R2014b 中,经过滤波处理再积分得出算法的触发阈值为1.6228m/s。以8ms 窗宽积分时20km/h 碰撞速度下的速度变化量曲线,如图5 所示。

图5 20km/h 碰撞速度下的速度变化量曲线Fig.5 Curve of Speed Change at 20km/h Collision Speed
5 双通道式ACN 系统综合控制算法
双通道式ACN 系统控制算法流程,如图6 所示。车辆在发生碰撞时,车速传感器首先识别出碰撞初速度v0,低于20km/h 速度碰撞时,由车速传感器识别出发生了轻微碰撞,不需要触发呼救信号;在(20~30)km/h 速度区间即灰度区间内发生碰撞时,由移动窗积分算法识别碰撞的严重性,当采集到的最大加速度amax小于所设定的门槛阈值2g 时,算法认为没有发生碰撞,则继续采集加速度信号,当amax大于2g 时,算法识别出发生了碰撞,开始计算8ms 窗宽内的速度变化量△V,不断与所设定的触发阈值比较,当△V 大于触发阈值1.6228m/s 时,则算法判定ACN 系统需要自动触发呼救信号,否则继续检测加速度信号;大于30km/h 速度发生碰撞时,由比功率算法识别出发生了严重碰撞,当比功率值大于触发阈值45340m2/s4时,触发安全气囊点火装置同时ACN 系统发送呼救信号,否则继续采集车速和加速度信号。

图6 双通道式车辆自动呼救系统触发算法流程Fig.6 Dual Channel Vehicle Automatic Call System Trigger Algorithm Flow
从图6 可以看出,当在发生碰撞而安全气囊由于在灰度区间内不能点火时,所设计的独立通道能保证仍能发送呼救信号给呼救中心,这种情况如果发生,驾驶员肯定会因为安全气囊没有打开,而受到更严重的伤害,这时紧急呼叫系统能正常工作将大大提高车内乘员的生存率。
6 算法验证
利用所开发的ACN 系统终端,利用台车模拟实车正面碰撞固定壁障试验,来验证所设计的独立通道控制算法和安全气囊通道控制算法的可靠性及其触发阈值是否合理,试验设备包括台车碰撞试验系统,如图7 所示。ACN 系统终端,如图8 所示。ACN 系统终端包含事故检测模块和事故发送模块等。试验采用DAPGQJ-MNPZ 型台车碰撞试验系统,事故检测模块与台车刚性连接。

图7 台车碰撞试验系统Fig.7 Trolley Crash Test System

图8 ACN 系统终端Fig.8 ACN System Terminal
试验按照GB14166-2003、GB11551-2014 等相关法规,分别在20km/h 以下,(20~30)km/h 和30km/h 以上各进行了8 次重复正面刚性壁障碰撞试验,同时记录了ACN 系统触发和不触发的次数,事故检测模块通过加速度传感器实时采集碰撞过程中的x轴加速度,采集频率为1000Hz,试验结果,如表1 所示。从表1 中可以看出,台车以低于20km/h 速度碰撞时,8 次试验中ACN 系统触发次数为0 次,说明低于20km/h 速度发生碰撞时ACN 系统不触发;而以(20~30)km/h 和大于30km/h 速度碰撞时,ACN 系统全部触发,说明速度变化量ΔV 和比功率值UdP 都超过了所设触发阈值。因此可以得出,台车以低于20km/h 速度碰撞时,ACN系统算法不会触发,这与车辆在低于20km/h 发生正面碰撞时,安全气囊不会点火一致,而以(20~30)km/h 速度碰撞时,独立通道算法一定触发,说明安全气囊在灰度区间内不点火时ACN 系统仍可以触发,以30km/h 以上速度碰撞时属于高速碰撞,ACN 系统必须触发,所以这里所设计的触发算法及其触发阈值均合理。

表1 台车碰撞试验结果Tab.1 Trolley Crash Test Results
7 结论
结合移动窗积分算法和比功率算法设计出独立通道触发算法和安全气囊控制算法,并确定了两个通道的触发阈值,一并构成双通道式ACN 系统,给出了双通道下的决策方案。并通过台车碰撞试验进行验证,试验结果表明:将独立通道的触发阈值设为1.6228m/s,可以保证车辆在(20~30)km/h 速度发生碰撞时ACN系统触发,将安全气囊通道的阈值设为45340m2/s4能够保证汽车发生中高速碰撞时ACN 系统触发,所设计的双通道触发算法能够提高安全气囊灰度区间内的触发率。
