气体泄漏智能检测小车的设计
2021-03-05程义军
程义军
(太原工业学院,山西太原 030008)
0 引言
化工类企业存在很多气体介质,其中部分产品是易燃易爆且有毒有害气体。一旦发生泄漏事故,又没有及时发现并采取措施,将对企业以及周边的人员和财产造成不可估量的损失。因此需要有效的巡逻监测来避免事故的发生。传统的人工检测和传感器网络监测手段需要投入大量的人力和物力,降低了企业的经济效益,且对巡检人员存在一定的危险性。为了解决以上问题,设计了可以自主移动的气体检测智能小车,可以实现自主巡逻,实时监测有无气体泄漏,并在检测到气体泄漏时准确发送泄漏源位置信息。以便工作人员及时采取应急措施,保障企业的安全生产,降低企业的安全生产事故。
1 智能小车功能
1.1 自主导航及避障功能
智能巡检小车可以在无人操作的情况下根据事前输入的路径规划信息或事先布置的路径标记,利用已安装的避障传感器和寻迹传感器自主避开巡检线路上的障碍物,实现自动巡航。
1.2 泄漏气体检测
智能小车可以利用搭载的气体传感器对泄漏气体及其浓度进行实时监测,当检测环境中有害气体浓度超过预设的阈值时,智能小车会停止运行,并发出报警信号。
1.3 GPS 定位
当智能小车检测到超标的泄漏气体浓度时,会在报警的同时,将异常情况发生的泄漏源坐标,快速准确的传递给工作人员,以便快速实施应急措施,减少人员和财产损失。
设计基于STM32 单片机的智能巡检小车,可以实现气体泄漏源的实时监测。其中,微控制器部分是整个智能巡检小车系统的“大脑”,负责控制智能小车的运动、泄漏气体的检测与信息反馈;各类传感器部分是系统的“感觉器官”,是实现巡检系统功能不可或缺的部分;良好的通信传输系统能够实现工作人员对于气体泄漏浓度的实时监测。智能巡检小车硬件系统如图1 所示。
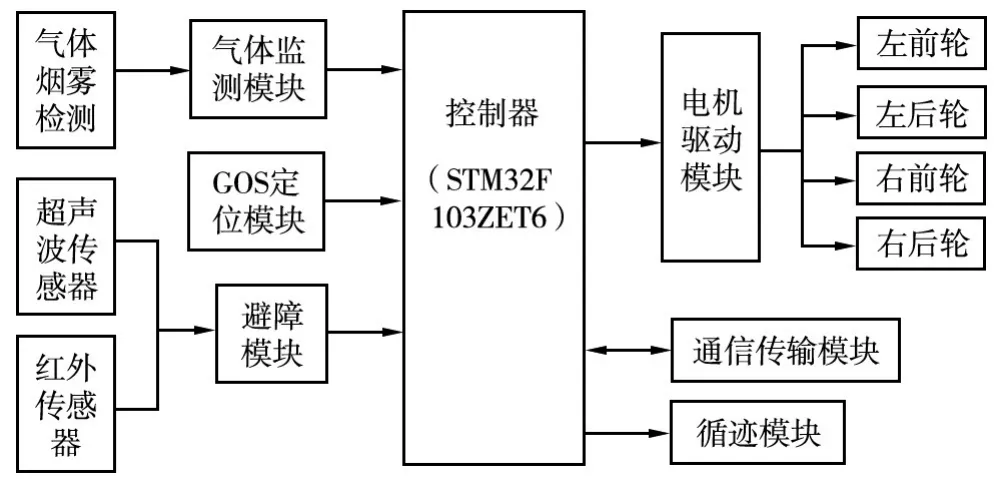
图1 硬件系统
2 硬件系统设计
2.1 电机驱动模块
智能小车选用的是直流电机,工作电压为3~6 V,无负载电流70 mA。为此选用L293D 电机驱动芯片,最高工作电压可以达到36 V,瞬时峰值电流可达2 A,可以驱动直流电机、继电器线圈等感性负载。
2.2 避障模块
超声波是一种指向性强的高频声波,利用超声波在空气中已知的传播速度,采集超声波在发射后遇到障碍物反射回接收端的时间,从而可以计算出发射点距离障碍物的实际距离。本文选用HC-SR04 超声波测距模块,可以实现20~4000 mm 的非接触式距离感测,精度可以达到3 mm。但超声波测距具有一定的盲区,难以实现近距离障碍物的检测,为此提出在超声测距模块两侧各安置一个HJ-IR2 红外避障传感器来弥补超声测距的缺陷。
2.3 气体监测传感器
选用MQ-2 传感器实现对泄漏气体的检测,该传感器采用双面板设计,配备了电源指示和TTL 信号输出指示,模拟输出电压为0~5.5 V,输出电压随着气体浓度的升高而增加。具有稳定性高、寿命长和响应速度快等优点。可用于家庭燃气泄漏监测,也可用于工厂液化石油气、丁烷、丙烷、酒精和烟雾等气体的检测。
2.4 通信传输模块
ATK-S1216F8-BD GPS/北斗模块被用于实现对于气体泄漏源的定位。该模块具有167 个信息交换通道,跟踪灵敏度可达-165 dBm,输出最大频率可达20 Hz,可以配合控制器实现泄漏源的准确定位及发送。为了实现自主巡检,可以预先铺设带有颜色的闭合线路,智能小车可以沿着带有颜色的线路进行自主移动。
3 软件程序设计
智能巡检小车的总体流程如图2 所示。当智能巡检小车系统控制器接收到外部传感器提供的输入指令时,执行对应的处理子程序。当单片机控制器没有接收到外部发出的指令时,就执行循线运动以及对周围障碍物的检测和规避程序。当智能巡检小车运动方向周围存在障碍物,被超声波测距传感器或红外避障传感器检测到时,系统转入避障运动处理子程序,智能巡检小车开始进行自主避障。如果超声波传感器与红外传感器检测到前方没有障碍物时,移动小车继续沿铺设的轨道线行进。当气体检测传感器MQ-2 检测到气体泄漏浓度增大到预警值时,智能巡检小车将泄漏气体浓度和GPS 定位模块测算到的位置通过串口通信,发送到PC 机。

图2 程序流程
4 系统测试与分析
测试环境是在平整的地面上用黑色的宽胶带纸在地面上铺设一个不规则的闭合圈。并在路边放置一个酒精泄漏源,来模拟工厂危险气体泄漏状态。当打开小车电源时,小车将沿着轨道进行自主运动,并自动停在气体泄漏源处,发出报警声。GPS 开始定位此刻的位置,并将信息通过无线信号发送到电脑主机。发回的坐标为112E,37N,高度为815 m。为了模拟小车运行时遭遇障碍物的情形,在运行轨迹上人工设置了障碍物,测试发现小车可以在遭遇障碍物时成功绕过障碍物,继续沿着轨迹运行。系统测试如图3 所示。

图3 系统测试
5 结束语
设计了基于STM32 的智能巡检小车,并完成了实物的制作。测试结果表明该智能小车可以很好的完成自主避障运动,危险气体检测、气体泄漏源定位和循线运动等预期功能,验证了设计方案及软硬件系统及算法的可行性和有效性。
太原工业学院应用性课程建设项目:“基于微课翻转课堂的DSP 应用性课程建设”项目编号:2017YJ07Y。
