基于NB-IoT的近海渔网示位标系统
2021-03-05徐轶群
关 立,徐轶群
(集美大学轮机工程学院,福建 厦门 361021)
0 引言
渔网示位标安装于渔网、定制网具或养殖网箱上,利用AIS技术向渔民指示网具的位置,为渔业捕捞和养殖提供一定的便利[1]。然而,目前市面上的基于AIS技术的渔网示位标缺乏统一标准,渔民或厂商随意配置其水上移动业务标识(MMSI)及其他参数[2],导致在电子海图中难以区分渔网和船舶,影响船舶交通安全。研究解决渔网AIS示位标问题不仅可以保障船舶交通安全,而且可提高海上搜救、海事监管工作的效率。郑峰[3]设计了基于AIS技术的渔具定位避碰装置;刘铁君等[4]提出渔网AIS示位标采用主从模式,单张渔网只挂载一个主设备接入AIS系统,从设备使用AIS技术与主机通信方面来减少船台显示,而这种方式虽然降低了发送设备数量,但发送数据总量并无显著减少,无法解决AIS信道时隙占用的问题;黄伦文等[5]采用406 MHz卫星通信的方式设计了一种基于北斗应急无线电示位标,但该方案成本较高且数据更新效率较低;王连胜等[6]设计了一种基于GPRS通信方式的一键式紧急无线电示位标,可应用在渔网定位领域,该方案采用的是自有协议及自建数据平台。
NB-IoT(Narrow Band-internet of things)作为新兴物联网技术,可以提供广覆盖、低功耗、低成本、多连接的网络服务,相比LTE和GPRS基站有20 dB的增益提升[7],在内河流域及近海都有不错的网络覆盖。通过PSM(power saving mode)模式与eDRX(extend discontinuous reception)技术的搭配,设备得以在低功耗状态下长期工作。
目前数据服务器和云平台的搭建主要有两种形式:1)独立搭建数据服务器,构造私有云平台,该形式在数据协议上灵活可控,数据保密性更高,但开发周期长,难度大,针对设备数量庞大的系统并发处理复杂,不利于应用的快速上线;2)采用运营商服务器及标准的物联网开发平台,如阿里云、百度云、OneNET等,该形式系统部署快速,用户不必考虑复杂接入过程,对不同平台兼容性更强,但用户数据传输必须通过物联网平台,存在商业风险,且数据接入商业用途后运营商可能收取使用费。
本文设计的渔网NB示位标选择NB-IoT技术作为通信手段,选择中移物联的OneNET云平台作为云服务平台开发端。设备通过窄带网络将渔网示位标的坐标及电量等相关信息上传到OneNET云平台,供相关用户查看,目标用户可以通过OneNET云平台对设备数据上报周期,工作状态等相关参数进行远程配置。由于示位标工作频段不在AIS信道上,对现有AIS系统不会造成干扰,对船舶交通、海上搜救、海事监管等方面有着积极作用。此外,本设备使用的功耗控制策略与动态休眠算法,比传统的固定数据上报周期模式在续航上有更大优势。
1 系统架构
基于NB-IoT与云服务平台的渔网示位标系统主要包括:北斗/GPS导航卫星、渔网NB示位标、NB基站、OneNET云平台及应用服务器、终端用户5个部分组成,如图1所示。
其中,渔网NB示位标通过北斗/GPS双模天线接收北斗/GPS卫星信号,解析获得NMEA0183协议GPRMC报文,提取并保存其中的时间、经纬度等所需数据。通过12位ADC获取电池平均电压,基于电池电量曲线表得出设备当前电量。在设备入网后,以物联网专用的LWM2M协议格式注册到OneNET云平台。OneNET云平台响应各个渔网NB示位标的注册,并下发发现资源命令及转发应用服务器请求订阅命令。渔网NB示位标注册在网后,通过OneNET云平台将相关数据信息上报给应用服务器。应用服务器以OneNET云平台作为桥梁,获取渔网NB示位标上报信息,并下发控制命令,形成面向用户的渔网公共服务管理系统,实现数据可视化与指令控制。用户通过web页面登录应用服务器,即可查看设备的地理位置等信息,拥有权限的目标用户可以向指定的渔网NB示位标下发控制指令,如调整上报时隙,改变工作状态等,实现远程控制。
2 渔网NB示位标设计
2.1 渔网NB示位标硬件设计
渔网NB示位标硬件主要由单片机与串口电路、北斗/GPS双模定位与NB通信模组电路、充放电及电源管理电路三个部分构成。
2.1.1 单片机与串口电路
单片机及外围控制口、串口电路原理图如图2所示。选用ST公司STM32L031系列单片机作为主控制器,该单片机在待机模式下功耗仅为0.25 uA,并具备低功耗串口通信功能[8](LPUART),负责控制NB模组数据收发以及定位数据接收。串口2连接CH340芯片,实现串口转USB调试、数据打印等功能。通过内部12位ADC管脚BAT_ADC以及电路导通控制管脚BAT_CHECK实现对供电电压的实时监测。BC20_PWR、BC20_RST、BC20_EINT、BC20_GNSS_POWER管脚分别用于控制NB通信模组的供电、重启、唤醒功能以及为GNSS(global navigation satellite system)有源天线供电。

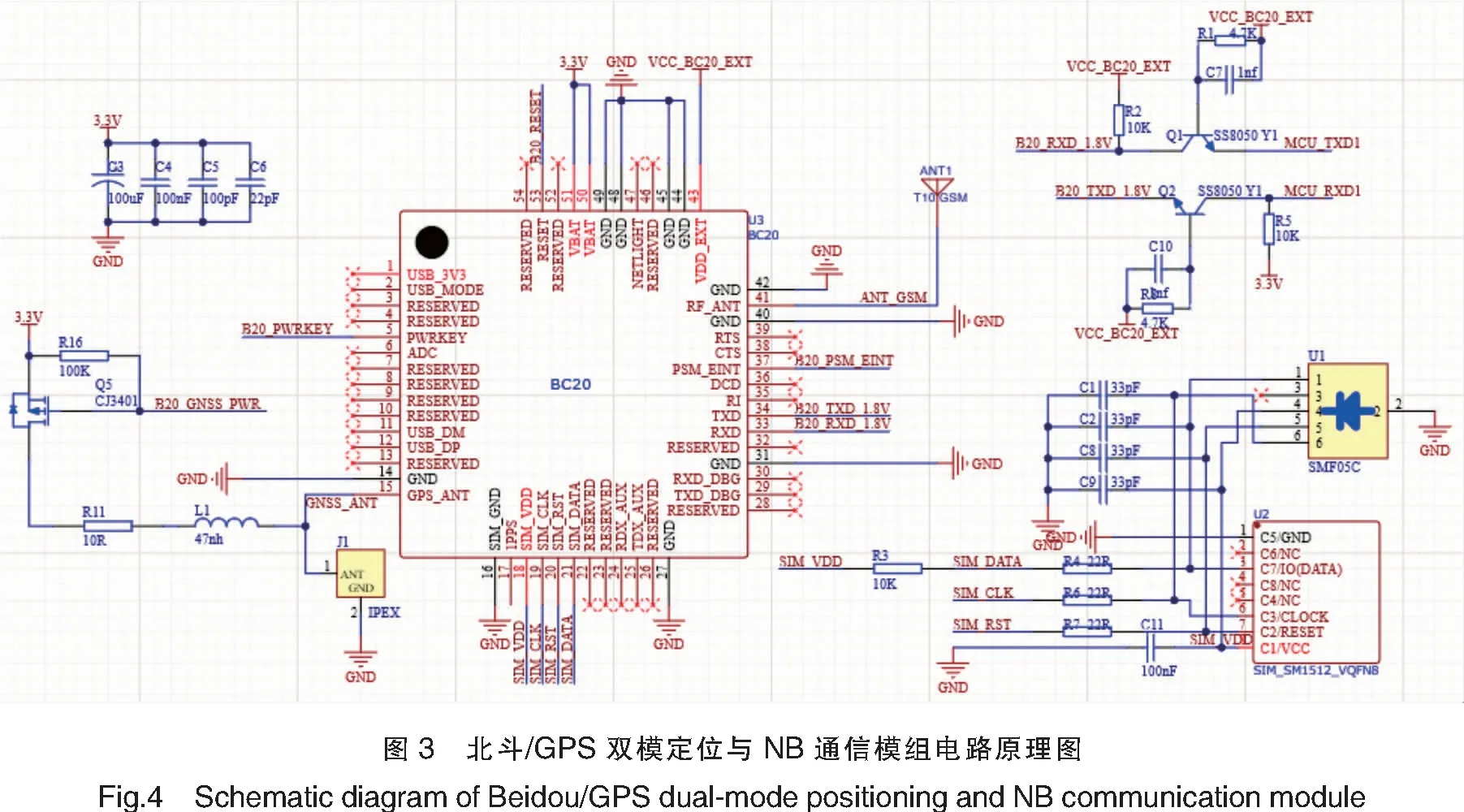
2.1.2 北斗/GPS双模定位与NB通信模组电路
北斗/GPS双模定位与NB通信模组电路原理图如图3所示。NB通信模组选用上海移远公司开发的BC20模组,该模组接收机集成了北斗、GPS定位功能,可以实现多系统联合定位[9],其卫星信号捕获状态下耗流为54.7 mA,跟踪状态下耗流30.2 mA,而当设备进入PSM工作模式时,耗流仅为3.7 uA。在与基站通信时,BC20模组在B5及B8频段上发射功率可达23 dBm,接收灵敏度为-129 dBm。模组在发射时段瞬时电流可达260 mA,设计时在其供电管脚VBAT附近并联了大容量去耦钽电容。BC20模组串口采用1.8 V电平,经过电平转换电路后与主控制器串口连接。在模组处于PSM模式下,其1.8 V供电输出管脚VCC_BC20_EXT无输出,串口无法正常通信,使用时通过引脚BC20_PSM_EINT唤醒后再进行串口通信,重新配置其工作状态。SIM卡选用贴片式5 mm×6 mm esim封装,减小设备体积,提高抗震能力。
2.1.3 充放电及电源管理电路
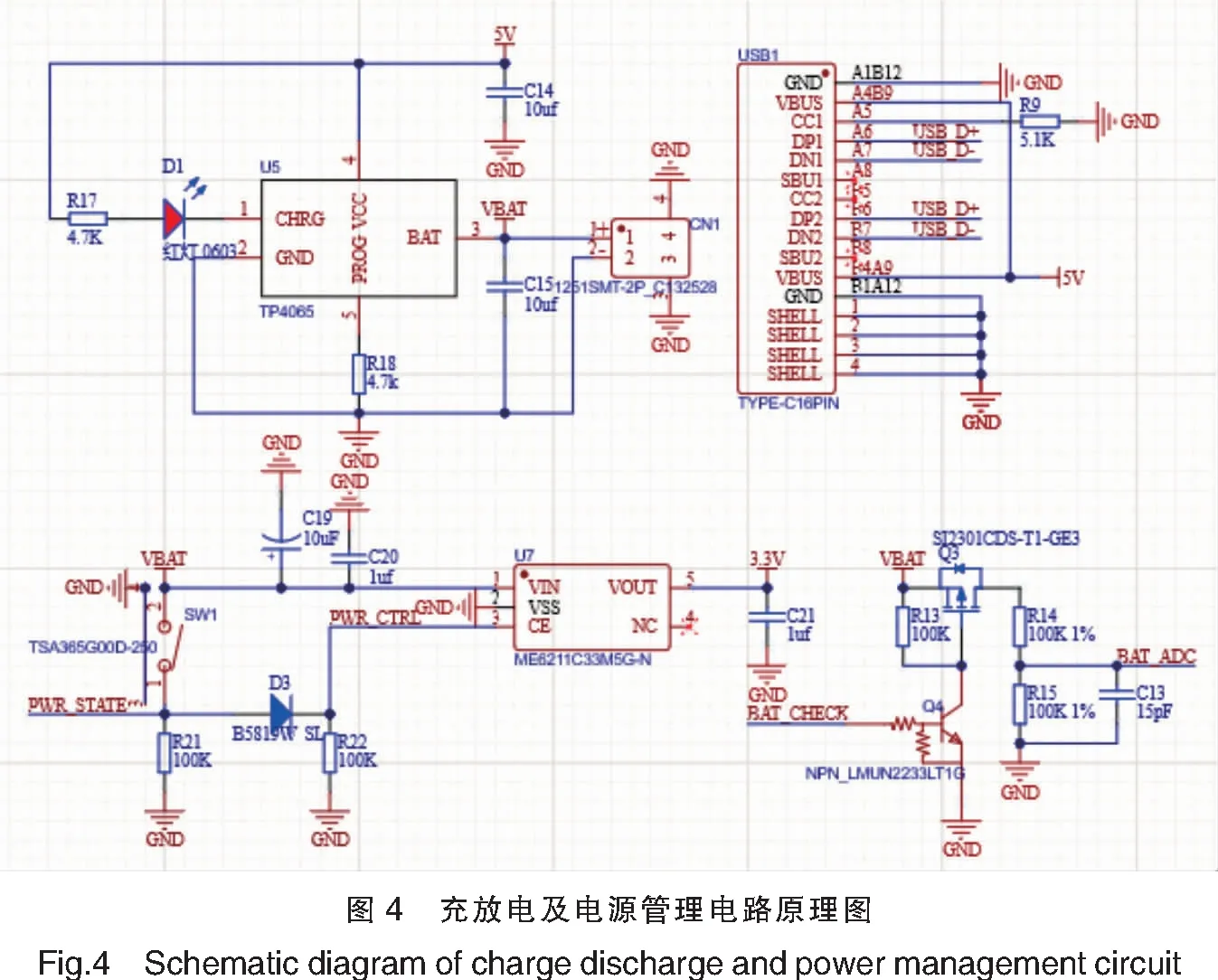
充放电及电源管理电路原理图如图4所示。渔网NB示位标使用3.7 V锂电池供电,充电接口采用市面上通用的USB TYPE-C接口,充电管理芯片选用TP4065,并选用ME6211C33M5G芯片作为LDO(low dropout regulator),将锂电池电压转换为主控器及NB通信模组工作电压。需要采集锂电池电压时,BAT_CHECK管脚拉高,导通Q3与Q4,通过主控ADC管脚采集R14、R15分压数据,采集完成后,关断数字三极管及场效应管,降低设备功耗。设备通过PWR_STATE管脚监测按键SW1状态,并通过控制PWR_CTRL管脚改变LDO使能管脚电平,实现按键关机功能。当设备安装于养殖网箱等长期海上作业体上时,可装配太阳能板实现长续航。
2.2 渔网NB示位标软件实现
渔网NB示位标软件主要基于STM32L031低功耗单片机与集成GNSS定位功能和NB窄带物联网通信功能的BC20模组,采用C语言开发,编译环境为Keil V5.26,软件主流程图如图5所示。

2.2.1 工作流程实现

通过开机按钮为设备上电后,主控制器进行初始化操作,并控制IO口保持供电电源,在接收到用户关机命令时,可通过控制此IO口实现远程关机。初始化BC20模组时,设备获取NB信号RSSI与EPS网络状态,注册到云平台,并根据云平台服务器的响应上报订阅号与资源类型。设备根据配置的数据上报周期启动AGPS和GNSS,获取经纬度及时间信息,并对电池电压进行采样,通过内部存储的电量电压匹配数组获取百分比形式的电量,再将相关数据逐一上传至云平台。同时,设备如果收到下行指令,则根据指令运行对应线程,如调整数据上报周期,改变工作状态,或者强制关机等。未收到下行指令,设备将在上报数据成功后,进入动态休眠模式,并开启外部与定时器中断,等待下次中断或上报时隙。程序中循环判断语句均添加了重试次数及错误处理函数,并添加了看门狗,提高设备运行稳定性。
2.2.2 功耗控制策略
设备不同工作状态下功耗状态如图6所示。分为5种运行状态:PSM为休眠态;receive为接收态;location为定位捕获态;transmit为通信态;IDLE为不连续接收态。由图6可知,设备能耗主要集中在获取定位、数据上传、数据接收过程中。为使设备在满足响应服务器下行命令时延情况下同时具备低功耗,软件采用eDRX技术,通过扩展的不连续接收模式来降低设备功耗,在eDRX周期内,向服务器申请较短的寻呼时间窗PTW(paging time window),缩短无数据交互期。在设备定位数据获取与上报周期内,设计动态休眠算法,建立设备上报时隙控制传递函数。

设备上报时隙控制传递函数框图如图7所示。其工作原理为:设备在启动后首先采集设备初始经纬度数据,之后根据预设上报时隙在第n次规定时间采集经纬度数据后,根据初始经纬度数据计算得出目前位置与初始位置水平偏移量Dn和与上一位置水平偏移量Dn-1之差dDn,根据Dn与dDn的值改变定位数据采样频率,并相应调整数据上报周期Tr(Tr初始值取300 s)。当位置偏移量Dn不超过设备水平定位精度Dcep时,可认为设备地理位置不变,则延长数据上报周期Tr,增加量Ta取值为设备的eDRX周期。当位置偏移量Dn超过限定阈值时,若dDn<0,说明示位标运动轨迹在回归起始点;若dDn=0,说明示位标在偏移初始坐标的某点处于静止状态;若dDn>0,说明示位标在快速远离初始坐标点,此时应缩短数据上报周期Tr,提高设备数据实时性。
建立的动态数据上报周期Tr模型如下:
(1)
3 渔网NB示位标的制作与测试
3.1 定位精度测试及功耗测试
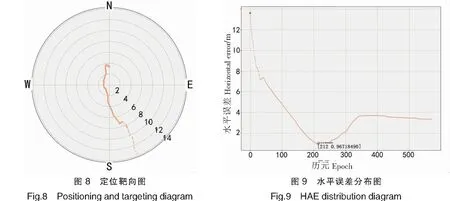
为测试渔网NB示位标基本功能的稳定性与可靠性,制作了设备样机,并在测试平台上对样机定位精度和功耗进行测试。将设备静置,对其定位数据进行统计,在570次定位中,水平定位误差基本在10 m以内,数据可以准确反映设备的真实地理位置,定位靶向图如图8所示,水平误差分布图如图9所示。
根据渔网NB示位标运行的软件设计,其数据上报周期Tr可分为定位通信区间Ta与休眠区间Td,即:
Tr=Ta+Td。
(2)
则单时隙耗电量Er(m·Ah)与时间Tr的关系可写为:
Er=Ia×Ta+Id×Td=Ia×Ta+Id×(Tr-Ta)。
(3)
其中:Ia为定位通信区间的平均电流;Id为设备休眠电流。
使用是德科技N6705电源分析仪配备N6781模块对渔网示位标工作下的耗电量进行测量,获得完整的定位通信区间电流消耗,如图10所示。设备在休眠区间下的电流消耗Id仅为0.09 mA;定位开启时电流为80 mA,从开启定位到获得有效定位耗时平均约16 s(开启AGPS);数据发送时全设备电流最高可达270 mA,每个数据包发送耗时约0.14 s;设备的定位通信区间Ta平均约为54 s,区间平均电流Ia为34.0 mA。以配备3000 m·Ah的锂电池,上报时隙固定300 s为例,不使用功耗控制策略,设备可于海域内静置连续工作484 h,约20 d;在使用功耗控制策略与动态休眠算法时,当设备的eDRX周期取值为81.92 s,且考虑设备位置偏移量基本小于设备水平定位精度的情况下,设备连续工作时间可长达2 701 h,约112 d。因此在设备长期处于静止状态下,采用动态数据上报周期模型续航最高可以提高约4.6倍。

3.2 水域安装测试
选择厦门集美园博苑内海水域对渔网NB示位标进行工作状态和功能测试,将设备与渔网固定,放置于水域中,设备实物图与测试现场照片如图11所示。测试人员通过手机端查看渔网所在位置,并对电量、经纬度数据进行监控,对快速寻标等控制功能也进行了测试。经测试,设备能够准确反映渔网的实时位置,并将数据及时上传回云端,对远程控制命令的响应也十分迅速,能够满足设计功能的要求。

4 基于OneNET的渔网位置公共服务平台设计
OneNET云平台是中移物联有限公司开发的一款免费的物联网开放平台[10]。该平台面向应用层,提供丰富的API和数据分发能力,开发者可根据平台提供的标准接入流程将设备接入平台[11]。OneNET云平台在应用管理上提供了BS架构的WEB网页及手机端[12]可视化界面开发套件,可以适应不同需求的应用开发。本文使用该平台提供的NB-IoT物联网套件,通过LWM2M协议接入,使用该套件自带的应用编辑器,实现基于OneNET的渔网位置公共服务平台设计。
4.1 手机端个性化应用
渔民作为渔网NB示位标的主要使用群体,根据其职业特点与用户习惯,在界面交互、功能设计、操作方式、显示效果上进行了专门优化,让用户能充分了解并利用渔网数据辅助决策,提升捕鱼和养殖效率。终端用户手机端操作界面分成三个页面,如图12所示。

用户在登录平台后立即显示主界面,该界面包含可视化渔网定位地图、设备剩余电量百分比显示以及数据更新时间,用户可以直观查看渔网所在位置以及设备电量剩余,通过缩放地图可以获得更加精确的位置信息,通过数据更新时间估计设备地理位置的时效。
通过菜单栏可切换至数据曲线界面,通过电量变化曲线可以预估设备剩余使用时间,通过经纬度变化曲线可知渔网位移区间,判断是否被水浪或渔船带离原有位置,以便进行现场处理,及时止损,提高效率。
设备高级配置界面提供了快速寻标功能、调整上报时隙功能、临时休眠功能、强制关机功能、数据流切换(多个示位标数据切换)功能。其中快速寻标功能在渔民收网或寻网时使用,通过应用服务器下发命令,可以在有限时间内将定位数据更新速率提高到3 s/次,使定位数据趋于实时。调整数据上报时隙功能可以手动调整渔网NB示位标上报数据的周期,范围为3~100 min可调,便于渔民将示位标应用于不同使用场景。临时休眠功能用于设备暂停上报定位数据时,以降低功耗。强制关机功能可以使设备直接断电,只能通过设备电源键重新开机。数据流切换功能可以实现多个可控示位标的控制切换,在用户拥有多个渔网NB示位标时可以通过切换数据流来监控不同ID设备。
4.2 渔网位置数据共享服务
通过渔网位置数据共享服务,用户可以查看全网渔网NB示位标的具体分布情况,如图13所示。通行船舶可通过平台查看航线内是否存在渔网,以便及时避让,监管部门可以通过平台查看通航区内是否存在违规布网,或有漂网在水流作用下进入航道内,方便及时采取措施,保障船舶交通安全。

5 结语
论文基于NB-IoT与OneNET云平台技术,设计开发了渔网NB示位标系统,并通过测试平台和沿岸海域安装测试实验,对系统的可靠性和有效性进行了验证。测试结果显示,设计的渔网NB示位标系统可以满足渔网定位监控功能,与传统AIS网位仪相比,具有体积小,功耗低,抗干扰能力强等优点,对渔民寻网、渔网监控及位置共享都有积极作用。
