基于Bi-LSTM模型的车载ATC设备故障诊断方法
2021-03-05余辉敏徐永能肖添文
余辉敏,徐永能,陈 新,肖添文
(南京理工大学 自动化学院, 南京 210000)
车载列车自动控制 (Automatic Train Control,ATC)设备在保障车辆安全运营、准时到达方面占有举足轻重的作用,该设备故障种类繁多,且同一故障现象的故障原因和对应的故障处置手段也不尽相同。由于司机的技能水平、应变能力以及对车载ATC设备故障的分辨能力参差不齐,因此,建立一套不依赖人为知识水平,通过诊断模型识别故障特征,实现故障标准化还原的智能诊断系统,对帮助故障标准化处置,保障列车的安全高效运营具有重要意义。
用于城市轨道交通信号设备的故障诊断技术主要分为基于解析模型的故障诊断技术和基于数据驱动的故障诊断技术[1]。1971年麻省理工学院的Beard[2]率先提出了基于解析模型的故障诊断思想,主要分为参数估计法、状态估计法和等价空间法[3-4],这种方法的优点在于能够深入而精确的探究设备的故障衍变机理,建立数学或物理模型准确的描述设备;相应的,由于模型的准确性很大程度受到模型参数设置合理度的制约,所以对于轨道交通信号系统这样大型复杂且先验知识不足的系统来说,建立对应的准确模型存在一定难度。而随着传感器技术的进步,以及设备状态监测系统的应用,大量反映设备状态的监测数据产生,为基于数据驱动的故障诊断技术提供了实现基础[5]。基于数据驱动的故障诊断技术通过挖掘设备运行数据中包含的设备状态信息,对设备状态进行诊断[6],这极大的满足了大型复杂系统高可靠性的需求。统计方法、信号处理方法和基于定量的人工智能方法为3个主要方法[7],其中基于定量知识的方法通过训练模型使计算机获得学习、推理、决策等能力得出定量结论[8-10],本文使用的基于Bi-LSTM神经网络的方法就是一种典型的基于数据驱动的故障诊断方法。
神经网络算法目前在智能诊断领域有着较为成熟的应用,以故障特征为输入,诊断结果为输出,经过神经网络模型的分类和判断,往往有较为可靠的诊断结果[11-13]。由于车载ATC设备的故障历史数据分布时间跨度大,本文建立了同时具有记忆特性和双向语义关联特性的Bi-LSTM模型作为分类器,以某地铁1号线近7年的故障工单数据为样本对模型进行训练和验证,实验表明,该模型能利用有限的故障记录数据实现故障诊断,对保障列车安全运营和及时准确故障应对具有十分重要的意义。
1 车载列车自动控制(ATC)系统组成
列车自动控制(ATC)系统由自动监控系统(Automatic Train Supervision,ATS)、自动防护系统(Automatic Train Protection,ATP)和列车自动运行系统(Automatic Train Operation,ATO)三部分组成。ATC系统能够实现对地铁车辆的自动防护和自动控制,同时具备行车指挥、列车运行监视、安全防护以及降级运行的能力,ATC车载系统部件组成如图1所示。
车载ATC系统的主要作用是保证列车的安全运营,配合地面及轨旁信号设备,控制列车的行驶速度,使其保持在安全的范围内,并在特殊环境,如雨雪天湿滑环境下,启动保护系统。车载ATC系统支持以下3种运行模式:自动驾驶模式(Automatic Mode,AM)、受监督的手动驾驶模式(Supervised Manual Mode,SM)、受限模式(Restricted Mode,RM)。一般情况下,车辆运行处于AM模式,由ATO系统自动驾驶列车,ATP系统保证列车在安全速度曲线内行驶,这极大降低了司机驾驶的疲劳度,也极大提升了地铁车辆的安全性,但当ATC系统发生故障时,可能会造成列车延误、清客等现象,严重时甚至会导致列车事故,造成经济损失和人员伤亡。为了尽量减少故障的发生,一方面,有赖于车辆上线前细致的检维修,另一方面也需要司机准确判断分析故障,定位故障模块,迅速且合理的处置故障状况,维持稳定的运营。
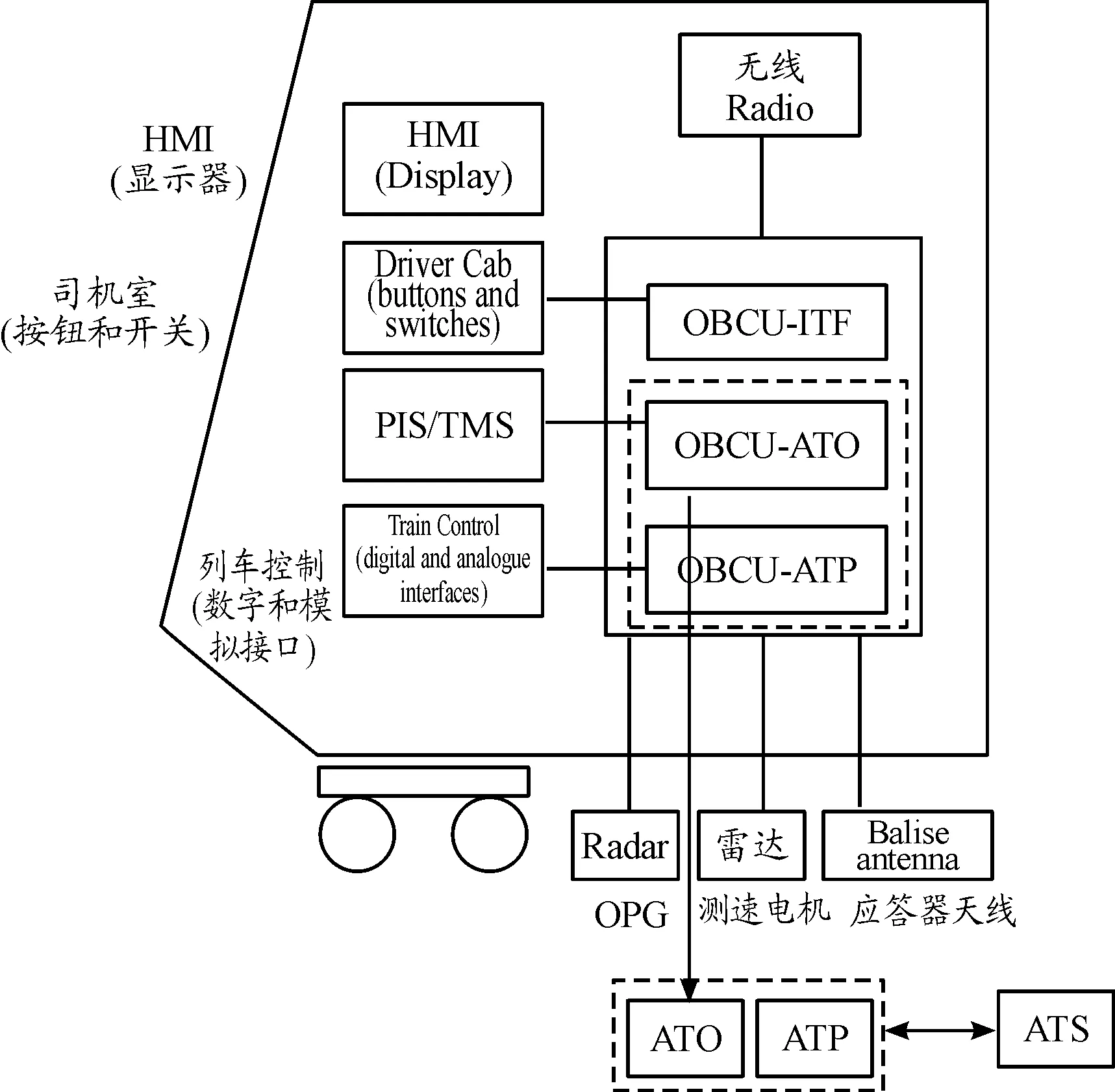
图1 ATC车载系统部件组成示意图
2 车载ATC设备常见故障分析
车载ATC设备是轨道交通信号系统的核心组成部分,车载设备故障,将严重影响列车的运输效率,以及乘客的出行体验,严重时甚至危及车载人员的生命安全。以某地铁1号线2010—2016年间1 003条车载ATC故障记录工单数据作为样本数据,对发生过的故障进行样本比例提取,如图2所示。

图2 某地铁1号线常见故障类型及所占比例图
由上述统计图可以看出,列车紧急制动故障、列车到站时冲标/欠标故障和ATP打叉三类故障发生概率更高,占总体发生故障的48.9%,下面对三类故障进行故障原因分析并给出处置建议。
1) 列车紧急制动故障。列车紧急制动出现故障是车载ATC系统出现频率最高的故障,导致该故障的原因比较复杂,不同驾驶模式下列车发生紧制的原因也不相同,超速、轨道湿滑、冲标等都会引起列车的紧急制动[13]。地铁列车发生紧急制动不仅会降低乘客乘坐的舒适度,甚至会引起列车延误和清客下线等严重后果,对列车的正常运营秩序造成不良影响。因此,列车发生紧制时,要求司机快速准确处置故障,首先应当缓解列车的紧急制动,使列车降级,若列车无法降级,则需要切换至RM模式动车,等待列车正常升级,倘若无法正常升级,则切除ATP行驶至下一站,重新启动。
2) 列车冲标/欠标故障。从故障统计中可以看出,列车冲标/欠标故障约占12%,指在ATO自动驾驶模式下,列车受信号设备控制自动进站时,车辆越过/未到达停车位的一种现象。车辆发生冲标/欠标故障后,往往引发车辆门与屏蔽不联动、列车紧急制动等问题,列车发生冲标/欠标故障时司机应当调整模式开关至手动位,手动驾驶列车对标。冲标/欠标故障极易造成列车晚点,尤其在高峰期时段,并且这种故障的发生率较高,有时一条线路一天能发生2~3次冲/欠标故障,为乘客出行带来不便。
3) 车载ATP打叉故障。车载ATP打叉故障往往引起列车紧急制动的联动反应,进而引发其他问题。就ATP打叉故障本身而言,故障原因存在多方面因素,常见的原因包括轨旁ATP故障、信号与车辆接口故障、信号传输故障等。
3 Bi-LSTM神经网络模型
3.1 Bi-LSTM神经网络模型介绍
Bi-LSTM (Bi-directional Long Short-Term Memory,双向长短时记忆网络)由一个前向LSTM(Long Short Term Memory Network——长短期记忆网络)与一个后向LSTM组成。由于车载ATC设备故障的发生并不是彼此孤立的,往往存在两种甚至两种以上故障现象,而Bi-LSTM模型的前后向结构,使得该模型在具有记忆特性的基础上增加了双向捕捉输入语义的能力,因此更适用于车载ATC设备的故障诊断。LSTM神经网络单元是Bi-LSTM神经网络的基本单元,属于一种判断自然语言情感倾向的分类器,LSTM模型的工作原理是实现Bi-LSTM神经网络的计算逻辑的基础[14-15],其网络细胞单元结构如图3所示。

图3 LSTM单元结构示意图

1) 遗忘门筛选弱关联度信息并删除:
ft=σ(Wf[ht-1,xt]+bf)
(1)
其中,ht-1表示上一时刻的隐层信息;xt表示当前的输入;Wf、bf为训练参数;σ为sigmoid函数(神经网络激活函数);ft表示保留信息的权重。
2) 输入门筛选强关联度信息,sigmoid层和隐层共同更新细胞状态中的信息:
Ct=ft·Ct-1+σ(Wi[ht-1,xt]+bi)·
tanh(Wc[ht-1,xt]+bc)
(2)
其中,Wc、bc表示训练参数;Ct-1表示前一个细胞状态的信息;Ct表示当前细胞状态的信息。
3) 输出门决定最终输出信息:
ht=σ(w0[ht-1,xt]+b0)·tanh(Ct)
(3)
其中,w0为权重矩阵,本文使用的权重矩阵为随机矩阵,即在模型训练开始时进行随机初始化,通过训练损失反向传播,迭代更新权重矩阵;b0为偏置项,σ为激活函数。
将前向LSTM与后向LSTM组合,可以得到Bi-LSTM模型,模型结构如图4所示。

图4 Bi-LSTM模型结构示意图
输入信号{X0,X1,…,Xn}分别送入前向LSTM模型与后向LSTM模型,分别输出前向隐向量{hL0,hL1,…,hLn}和后向隐向量{hR0,hR1,…,hRn},将前向与后向隐向量拼接得:{[hL0,hRn],[hL1,hRn-1],…,[hLn,hR0]},即{h0,h1,…,hn}。
3.2 Bi-LSTM网络模型的构建
1) 对原始车载ATC设备故障统计数据进行特征提取和特征标定,构成模型训练集:
Ft={f1,f2,…,fn}
2) 数据标准化处理;用X={X1,X2,…,Xn}表示处理后的训练集,作为模型输入,相应的,以Y={Y1,Y2,…,Yn}表示模型输出;
3) Bi-LSTM网络初始化,为初始权值矩阵赋值,设定其为均匀分布在[0,1]之间的随机数,设置最大迭代训练次数为800,窗口大小为32,学习率为0.001最小误差值为0;
4) 前向计算;训练集X输入隐层,Bi-LSTM模型包含双向LSTM隐层(前向和后向),训练时分别提取两组特征,每个LSTM隐层包含n个按时间数序排列的细胞单元,经过隐层的输出可表示为:HL={hL1,hL2,…,hLn}和HR={hR1,hR2,…,hRn};
5) 误差反向计算;分别从正向和反向两个方向的LSTM传递特征并计算结果,求得真实值和预测值的差异损失,根据这个损失,反向回溯整个网络,进而修改参数;
6) 当训练次数和误差值满足设定需求时,停止模型训练,并将剩余10%未知样本数据投入训练完成的模型中,对测试集分类。
7) 十折交叉法精度验证,从训练损失/准确率和测试损失/准确率四个方面分别对模型进行精度验证。
4 验证
本实验的训练数据为某地铁1号线2010—2016年间 1 003 条车载ATC故障记录工单数据,如表1所示。
首先对原始故障统计工单数据进行标准化还原,将车载ATC设备的故障数据按类别标定为训练数据;由于数据样本量较小,为了避免过拟合问题,本实验采取十折交叉验证法进行数据拟合,并对模型进行精度估算,即,按照9:1的比例,轮流对数据集进行训练与验证,训练集输入Bi-LSTM模型进行训练,分析故障描述语句与人工标定分类的关系,学习描述语句间的双向语义联系;最后将验证集输入模型,对未知样本故障进行诊断,验证结果如图5、图6所示。
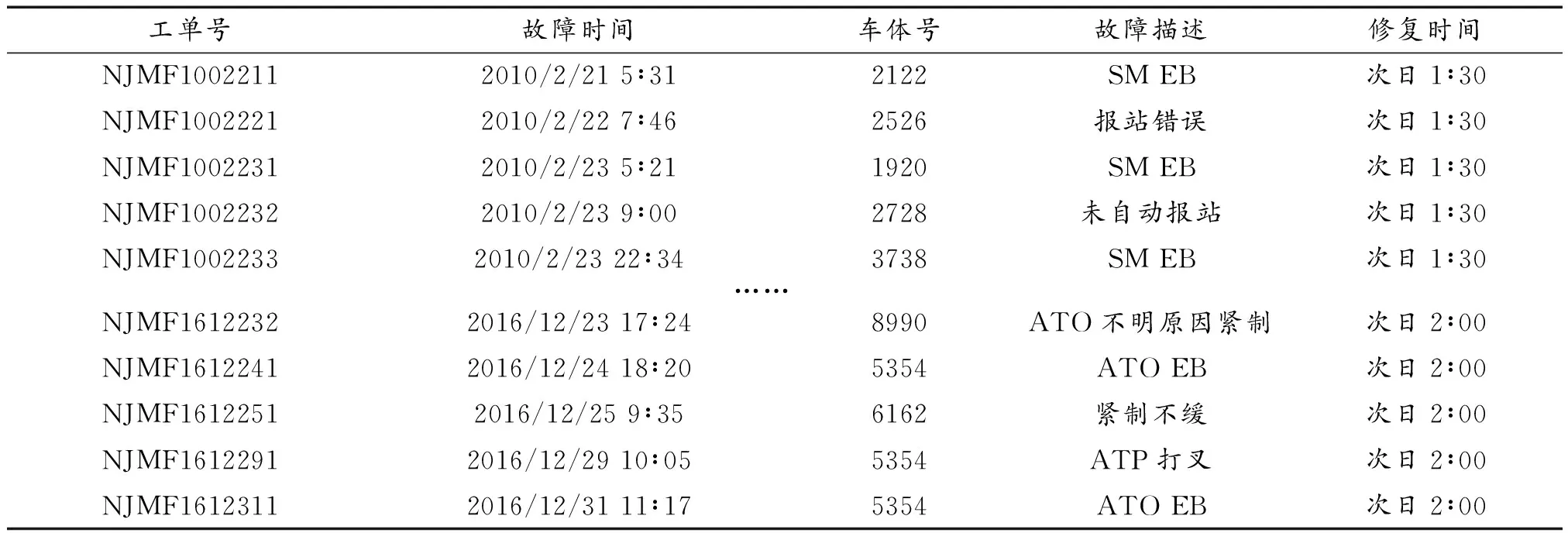
表1 某地铁1号线车载ATC工单数据

图5 Bi-LSTM模型对学习样本和未知样本的训练损失和测试损失曲线

图6 Bi-LSTM模型对学习样本和未知样本的训练损失准确率和测试准确率曲线
图5展示了Bi-LSTM模型对学习样本和未知样本的训练损失和测试损失,图6表示Bi-LSTM模型的训练准确率和测试准确率。由图5、图6可知,该模型在对数据样本进行分类训练时,随着迭代次数的增加,约四百次左右,训练结果趋于稳定和准确,取十折交叉验证的10次结果平均值作为该模型的精度值,如表2所示。
表2 Bi-LSTM模型精度

从验证结果发现,10次验证的精度结果相近,证明该模型鲁棒性较强,本文模型的精确度为98.9%,证实了该模型的有效性,值得注意的是,由于某些类型故障样本训练量过小,模型存在未能准确分类的误差,倘若增加学习样本量,模型还可以更加准确的分类。
5 结论
1) Bi-LSTM网络能够更精确的从历史故障样本中挖掘出不同类别的故障特征,提高了故障诊断的准确率;
2) 随着训练样本的不断积累与丰富完善,该故障诊断模型的准确率能够进一步提高,在训练样本不足的情况下,基于Bi-LSTM模型的故障诊断准确率能达到98.9%,对于时间跨度较长的车载ATC设备故障数据来说,该故障诊断方案具备良好的有效性;
3) 从实际运营的角度来看,该故障诊断方法容易实现,将突发故障描述输入训练完成的模型中,仅进行一次模型推理即可返回结果,耗时约0.03 s,在保障列车安全运营,实时故障诊断方面具有重要意义。
