军用多轮分布式电动车辆驱动力协调控制
2021-03-05刘春光马晓军王科淯
刘春光,马晓军,王科淯
(中国人民解放军陆军装甲兵学院 兵器与控制系, 北京 100072)
军用多轮电驱动车辆作为新型作战平台,由于具有驱动轮相互独立、供电方式多样等特点,可适应多种作战需求,可通过搭载装配不同装备组合胜任包括运输、突击、救援等各类作战任务,是近年来各国国防科研领域的关注热点之一[1]。作为战场人员装备输送平台,需要具备较高的越野能力,在复杂路面仍能保持较好的稳定性、机动性,但同类车辆多存在车身长,质量大等特点,这使得车辆的稳定性、机动性的协调控制成为研究的难点问题[2-3]。
以往相关研究多以提高车辆稳定性或平顺性作为控制目的[4],上层运动跟踪控制器考虑车辆运动状态及路面情况,计算出横摆角速度和质心侧偏角给定值,然后由下层转矩分配控制器分配至各驱动轮[5-6]。关于多轮车辆的控制研究中,只有少数学者考虑通过协调控制,实现车辆的双重转向,即在车轮纯滚动转向的基础上加入滑移转向,通过减小转向半径,提高车辆机动性。但控制车辆实现双重转向的研究中,多数仅考虑了车辆状态,未结合驾驶意图分析[7-9]。
本研究设计了一种协调控制策略,上层控制器包括驾驶意图解释模块、横摆控制模块,在计算横摆角速度给定值时,通过控制车辆双模转向中滑移转向与纯滚动转向比例,综合考虑车辆转向半径与横摆角速度控制问题,使上层控制兼顾稳定性与机动性控制;下层转矩分配模块中,采用模糊控制,依据车辆状态和行驶控制目标,协调分配各驱动轮转矩给定[10]。
最后在ADAMS与Simulink联合仿真环境下进行典型工况仿真试验,验证控制方法的有效性,为同类型装甲车辆行驶控制设计提供参考[11-13]。
1 控制器设计
分布式驱动协调控制器包括3个模块:驾驶意图解释模块、横摆控制模块和转矩分配模块。控制器逻辑框图如图1。

图1 分布式驱动协调控制器逻辑框图

该驱动转矩目标值经Flexray总线下发轮毂电机控制器,电机控制器采用防滑控制算法对各驱动轮进行驱动控制,实现车辆多轮独立电驱动行驶。
1.1 驾驶意图解释模块算法
基于8轮双前桥转向车辆双轨二自由度模型,建立车辆参考模型

(1)
式中:X=[βγ]T为车辆的状态变量;δ为转向轮转角;M为横摆力矩;A、B、C为车辆状态参数矩阵,具体表达式如式(2)中所示。
可推导,质心侧偏角和横摆角速度在双前桥转角δ输入下状态空间表达式:

(2)
其中:Li为各桥车轮距重心的纵向距离;Cαi为各车轮侧片刚度系数;Iz为车辆垂向转动惯量。
可推导出,自然转向下横摆角速度为
(3)
常规地,以横摆角速度γ为控制目标变量,通过调节车辆横摆力矩M进行运动轨迹跟踪控制,可实现轮式车辆的理想自然转向。为满足装甲车辆的战术使用要求,引入履带式车辆滑移转向机理,实现自然转向和滑移转向的叠加作用,可使车辆具有更小的转向半径,其基本思路是引入双模转向系数σ,以(1+σ)γ为控制量进行运动轨迹跟踪控制。
问题转化为:在一定的转向轮转角δ、车速Vx、路面附着系数μ条件下,在稳定运行区域内对双模转向系数σ(σ≥0)进行寻优,使车辆转向半径R(σ)与车辆质心侧偏角β(σ)的加权之和最小[12]。
为此,设计寻优目标函数:
(4)
式中:Kt1、Kt2分别为车辆转向半径、质心侧偏角变量的权值;R*、β*分别为车轮纯滚动条件下(σ=0)车辆自然转向的半径、质心侧偏角。
约束条件包括侧向力小于路面最大附着能力和质心侧偏角-质心侧偏角速度相平面轨迹在稳定区域边界内,整理如式(5)和式(6)所示:
m(1+σ)γVx≤μmg
(5)

(6)
在实际应用中,采用ADAMS软件构建车辆多体动力学模型,以转向轮转角δ、车速Vx、路面附着系数μ等边界条件,仿真在不同的双模转向系数下车辆稳定运行的车辆转向半径R(σ)与车辆质心侧偏角β(σ),由仿真数据拟合出σ~R(σ)、σ~β(σ)曲线。取权值K1=0.6,K2=0.4,在约束条件范围内采用二分法寻优,可获得双模转向系数σ的最优解,进而确定轨迹跟踪控制的目标变量(1+σ)γ。
1.2 横摆控制模块算法
以驾驶意图解释模块确定的(1+σ)γ为控制变量(为简化公式,下文以γd表示(1+σ)γ),采用滑模变结构算法计算期望横摆力矩:
选取滑模面
S=Δγ=γd-γβ_lim
(7)
采用指数趋近率
(8)
式中:h1>0,ε>0,可得:
(9)
将式(9)与车辆横摆运动方程联立,可得车辆横摆力矩:

(10)
以左转为例,为实现式(10)横摆力矩,单侧驱动轮的总转矩分别为:

(11)
式中:TL、TR分别表示左、右侧4个驱动轮转矩之和;Td为根据加速踏板信号解析的需求总转矩。
至此,问题转化为如何将单侧驱动力矩TL、TR分配到4个电驱动轮上。
1.3 转矩分配模块算法
以车辆姿态传感器采集的俯仰角度θ、车辆纵向加速度ax为输入变量,采用模糊控制算法,输出同侧4台轮毂电机的扭矩分配系数,从第一轴至第四轴分别表示为ξ1、ξ2、ξ3、ξ4。模糊控制输入量和输出量的语言变量设定为{小,中,大,很大},模糊子集设定为{S,M,L,V}。由于三角隶属度函数具有灵敏度高的特点,采用三角函数作为θ、ax和ξ1、ξ2、ξ3、ξ4的模糊子集隶属度函数,分别如图2所示。
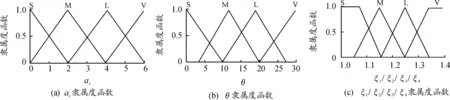
图2 输入量和输出量隶属度函数
制定表1所示的模糊控制规则。

表1 模糊控制规则
将转矩分配系数ξ1、ξ2、ξ3、ξ4进行归一化处理:
(12)
(13)
(14)
(15)
式中:τ1、τ2、τ3、τ4分别为归一化后的第一轴至第四轴转矩分配系数。
1.4 防滑驱动控制
由于篇幅限制,且驱动防滑控制部分非本文主要创新部分,所以只做简要介绍。具体方法可参考文献[12]。
由于各个驱动轮的载荷不同以及行驶路面条件的差异,附着条件较差的驱动轮不一定能输出期望的转矩,从而达不到整车牵引力以及期望横摆力矩的需求,影响车辆转向的稳定性。基于此,在单个车轮得到驱动转矩给定值之后针对单个车轮进行防滑控制,将车轮滑转率控制在最优值附近,最大限度利用路面附着力,同时,将因防滑控制而减小的驱动力增加到同侧其他未滑转车轮上,最大限度满足整车驱动力和横摆力矩需求。
1.5 轮胎模型
考虑到上层跟踪控制系统的工作涉及到车辆的非线性运行区,简单的线性轮胎模型必然无法满足实验精度要求,以往有学者在类似的研究过程中利用魔术公式建立轮胎模型,但魔术公式涉及到的拟合参数较多,计算较复杂,易与实时性要求冲突。
本文根据控制精度需要,选择Dugoff轮胎模型,该模型旨在描述轮胎非线性侧向力,涉及参数比魔术公式少,其描述如下:

(1)
式中,Cαi表示轮胎的侧偏刚度,与垂向载荷Fzi相关。
当轮胎的侧偏角发生变化时,会产生一个有时滞的轮胎侧向作用力,这种瞬时的轮胎特性可用一个松弛长度σi描述。进而得到动态轮胎侧向力模型:
(2)

2 ADAMS与Simulink联合仿真验证
为验证本文设计稳定性控制策略的有效性,在ADAMS中建立车辆多体动力学模型,其中包括轮胎模型和满足一般试验工况的地面模型,在MATLAB中建立了包含电机控制器的控制模型。为重点验证车辆控制系统在恶劣路面环境中对车辆的控制效果,进行了低附着路面中速双移线行驶仿真试验。路面附着系数为0.3,目标车速45 km/s。
ADAMS中多体动力学模型的车身及Simulink中电机驱动系统部分参数如表2所示。

表2 车辆及电机驱动系统部分参数
进行仿真试验,得到的行驶轨迹和其他有关曲线如图3~图6所示。
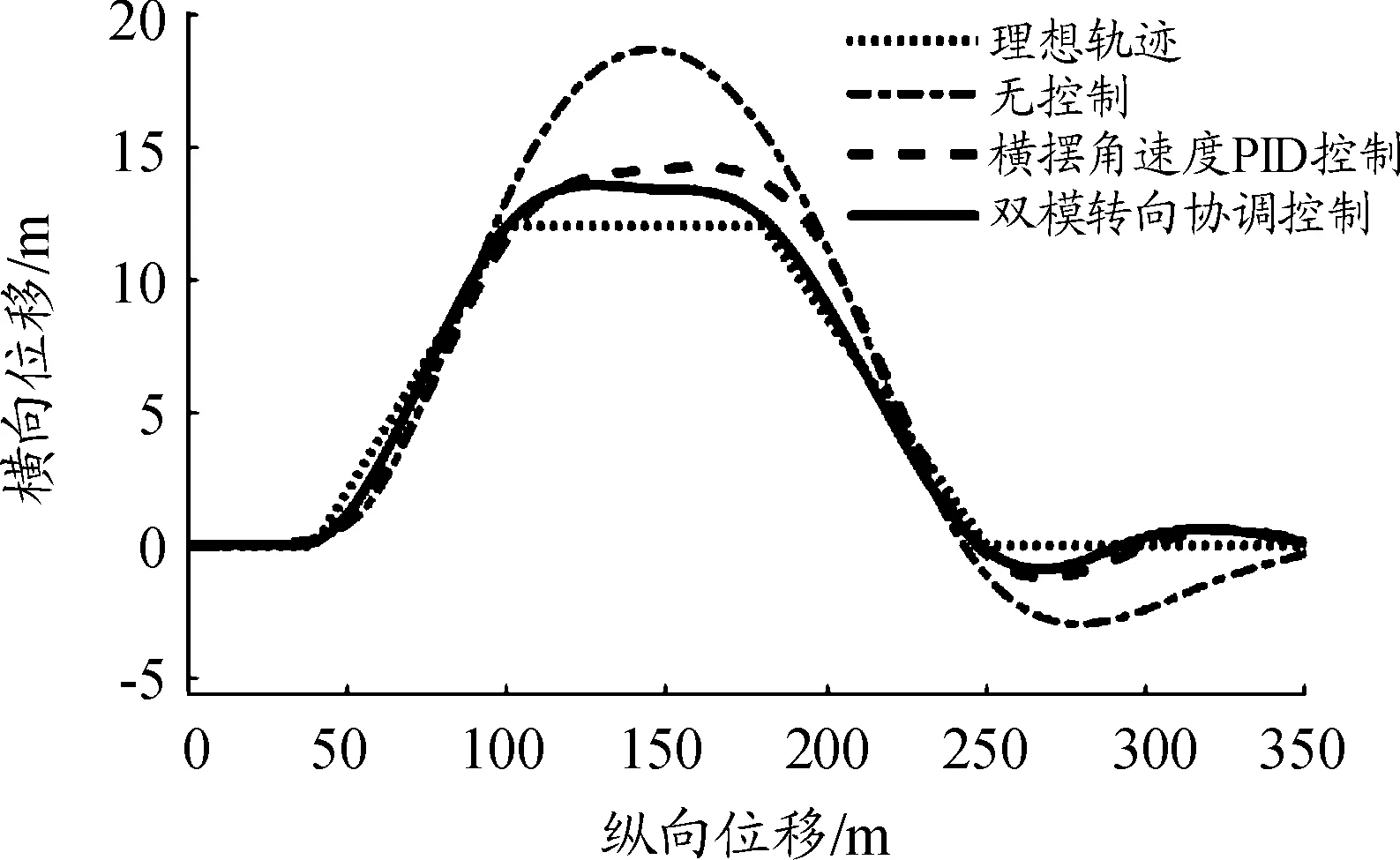
图3 行驶轨迹

图4 目标函数Γ(σ)曲线
比较图1中不同控制条件下的车辆行驶轨迹,可以看出,未施加行驶控制的车辆,无法按照预定轨迹行驶,在实验结尾处仍处于极不稳定的行驶状态,按照传统方法施加控制的车辆行驶过程中的稳定性有明显改观,而采用本文所述控制方法的车辆则具有更好的循迹能力,在每次转弯结束后,都能很快地恢复直线行驶。
图2中为目标函数minΓ(σ)的实时值,可以看出,虽然无论施加控制与否,在开始转弯时,函数值都会出现上升,但由于前两种控制方法未对该函数进行寻优求解,只控制了横摆角速度,未考虑转向半径的优化问题,其中PID控制方法,虽然控制了横摆角速度,但没有考虑转向半径的优化,所以函数值与未施加控制的结果较相似。结合图3易于理解,该控制方法,关注了稳定性控制,但没有直接控制车辆转向半径,所以对机动灵活性的控制较欠缺。综合比较可看出,本文所述方法的函数值上升幅度最小,趋势最平缓。
从图5可以看出,后两种控制方法,对横摆角速度的控制效果相似,而且后一种方法控制效果略优于前者。
图6为文中所述方法控制下各车轮转矩给定值,两侧的车轮、每侧的各个车轮都能依据车辆实际行驶状态、路面状态分配得到不同的转矩给定值。
3 结论
设计一种协调控制策略,驾驶意图解释模块和横摆控制模块构成上层控制器,在进行横摆力矩控制时,不仅控制了代表车辆稳定性的横摆角速度,同时也优化控制了车辆转向半径,从而提高车辆机动灵活性;下层转矩分配模块,采用模糊控制,综合车辆状态及路面情况,分配各驱动轮转矩给定,保证整车力横摆转矩实现。仿真结果表明,上述控制器,能够很好地控制车辆依据驾驶员意图行驶,充分利用多轮车辆具有双模转向的特点,同时控制转向半径与横摆角速度,综合改善车辆行驶时的稳定性与机动性,从各方面促进此类装甲车辆更好地发挥其武器效能。
