多维曲线在城市定向钻工程中的应用
2021-03-04上海煤气第一管线工程有限公司
上海煤气第一管线工程有限公司 徐 斌
1 工程概况
松安路定向钻工程属于深圳城市燃气管道建设的一部分,燃气管道自宝安大道与松安路交界处起,沿松安路并在其车行道下敷设。地勘资料显示,设计管位下有连续约1 100 m含水量大的淤泥段。设计穿越长度1 100 m、深度8.5 m,入、出土点地面高程4.00 m,将依次穿越人工填土层、淤泥层、胶黏土层和砂岩层。本工程使用的管道为φ508 mm×9.5 mm直缝双面埋弧焊钢管,材质为L360(X52),设计压力1.6 MPa。
受地下构筑物、地层、控制红线等影响,穿越导向轴线无法像常规定向钻呈“U”型,水平上呈10°弧度,规划给定的穿越位置距离红线位置不足2 m,水平位置须与道路同弧度弯曲,纵向上,设计断面位置分布有箱涵和污水管。纵向轴线须呈“ ”形状才能有效避让地下构筑物和不良地层。如何实现空间多维曲线轨迹的控向,使之精确地按照预定轨迹钻进,是本定向钻必须解决的难点。本文经分析和计算后充分利用管道的弹性极限和钻机的优良性能,通过采取精准的导向措施来解决这一难题。
2 轨迹设计
2.1 设计思路
图1为 HDD曲线轨迹最优化法设计示意,HDD(Horizontal directional drilling,水平定向钻)钻孔轨迹设计中会遇到两种情况:一是要绕过障碍物,如有穿越施工垂直平面的或有平行于施工垂直平面的;二是必须经过某些特定的点,如图1中的B、C点。对于第一种要绕过障碍物的情况,也可看成是经过满足与障碍物距离大于安全距离的一些垂直平面内的特定点,如图1中的Gi、Gi+1和Gi+2点。所以,根据动态规划方法,可把HDD钻孔轨迹分为若干个阶段,如图1中GiGi+1为一个阶段。每阶段分别在垂直平面内进行设计,最后由最优化递推方程得到最终的设计钻孔轨迹[1]。
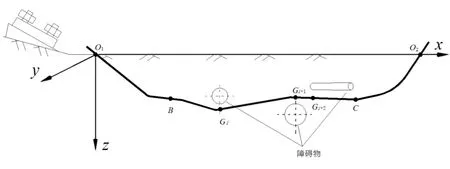
图1 HDD曲线轨迹最优化法设计示意
2.2 动态规划模型的建立
首先,以入土点为坐标原点建立整体坐标系O-xyz,对标准形式钻孔轨迹进行设计,但由于地下原有管线众多,所以预铺设管线穿越BC段会与障碍物相交,或设计距离小于安全距离。为了绕开障碍物,现在BC段以曲线形式重新设计。若障碍物个数为n,将其按x坐标值从小到大排序,设B点为G1,C点为Gn,钻孔轨迹绕过障碍物时穿越点依次为G2,G3,…,Gn-1,则可把BC段钻孔轨迹设计划分为n-1个阶段:B点到第一个障碍物穿越点为第一阶段,第一个障碍物穿越点到第二个障碍物穿越点为第二阶段;依次类推,最后一个障碍物穿越点到C点为第n-1阶段。即各阶段依次为:G1→G2→,…,Gn-1→Gn。
在此,把各阶段的起点空间位置作为状态变量心。设计过程中,当处于某一阶段的某个状态时,需要决策下一阶段的状态,用ui(ti)表示第i个阶段的决策变量,则有状态转移方程为ui(ti)=ti+1。如决策变量取值范围图2所示。
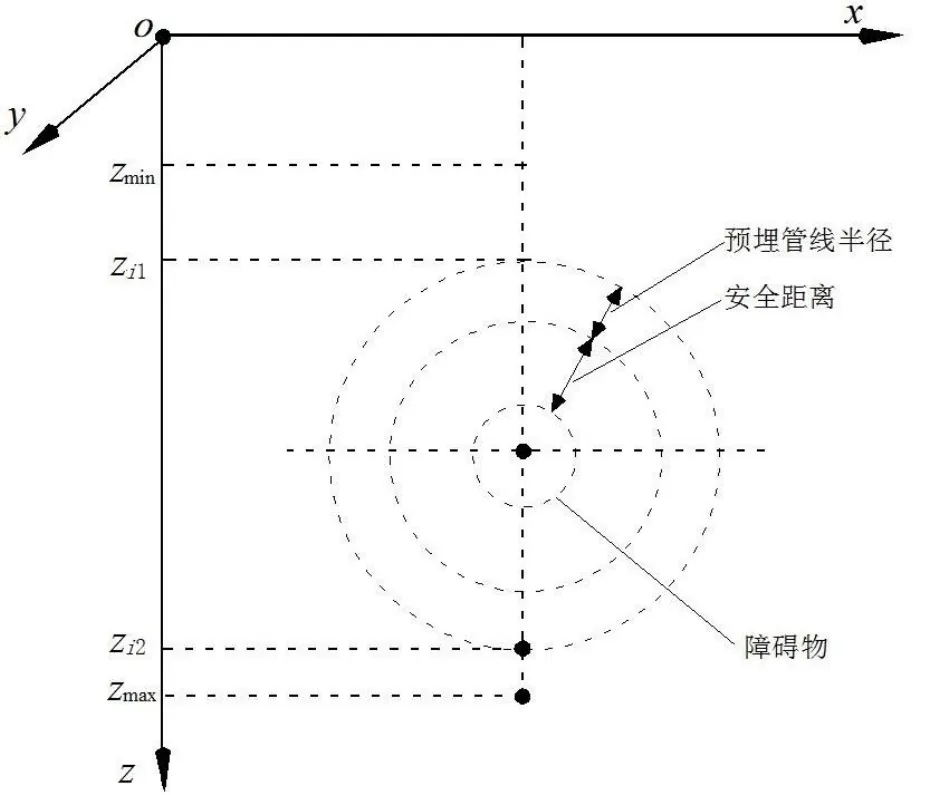
图2 决策变量取值范围示意
在满足埋管深度范围要求的条件下,钻孔轨迹绕过障碍物的穿越点可有多种选择,即决策变量有一定的取值范围,称为可行决策集,用Ui(ti)表示。

显然,ui∈Ui(ti)。
用Ti(ti,ui)表示第i个阶段轨迹所需的钻进台时数,则动态规划模型为:
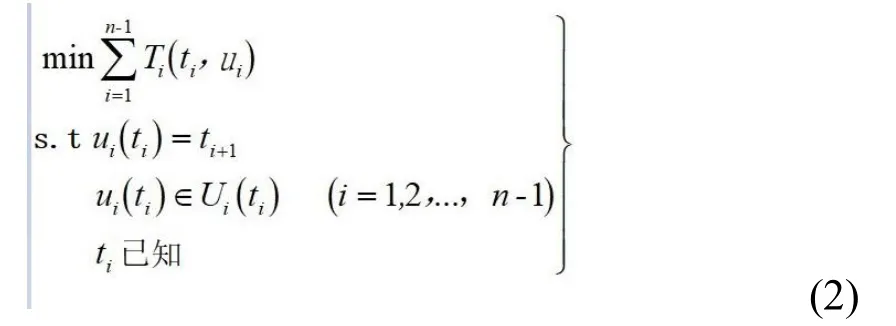
这是一个多阶段决策过程。该模型可通过计算机递推求解。设从第k个阶段开始到最后一个阶段的最优值为fk(tk),则有:

得出最优化递推方程为

2.3 参数确定
通过上述分析和计算,确定的轨迹设计参数见表1,轨迹计算见表2[2],轨迹模型模拟界面见图3。
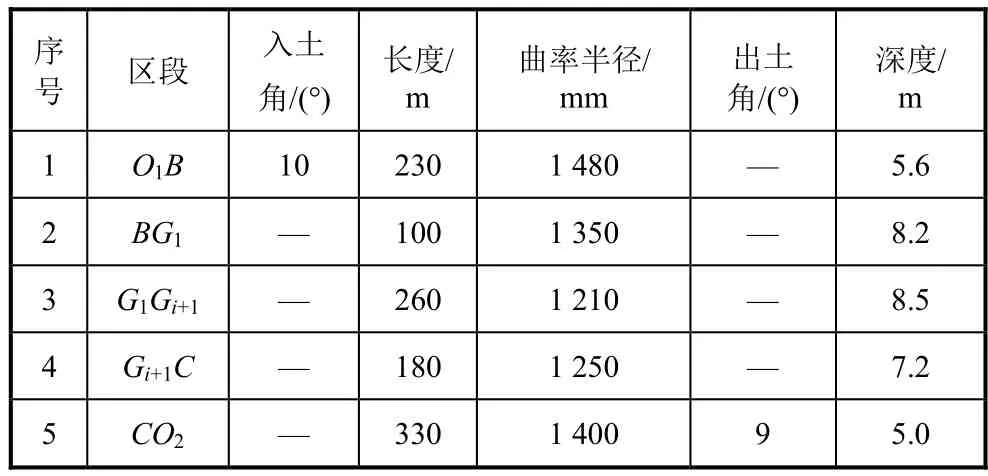
表1 轨迹设计参数
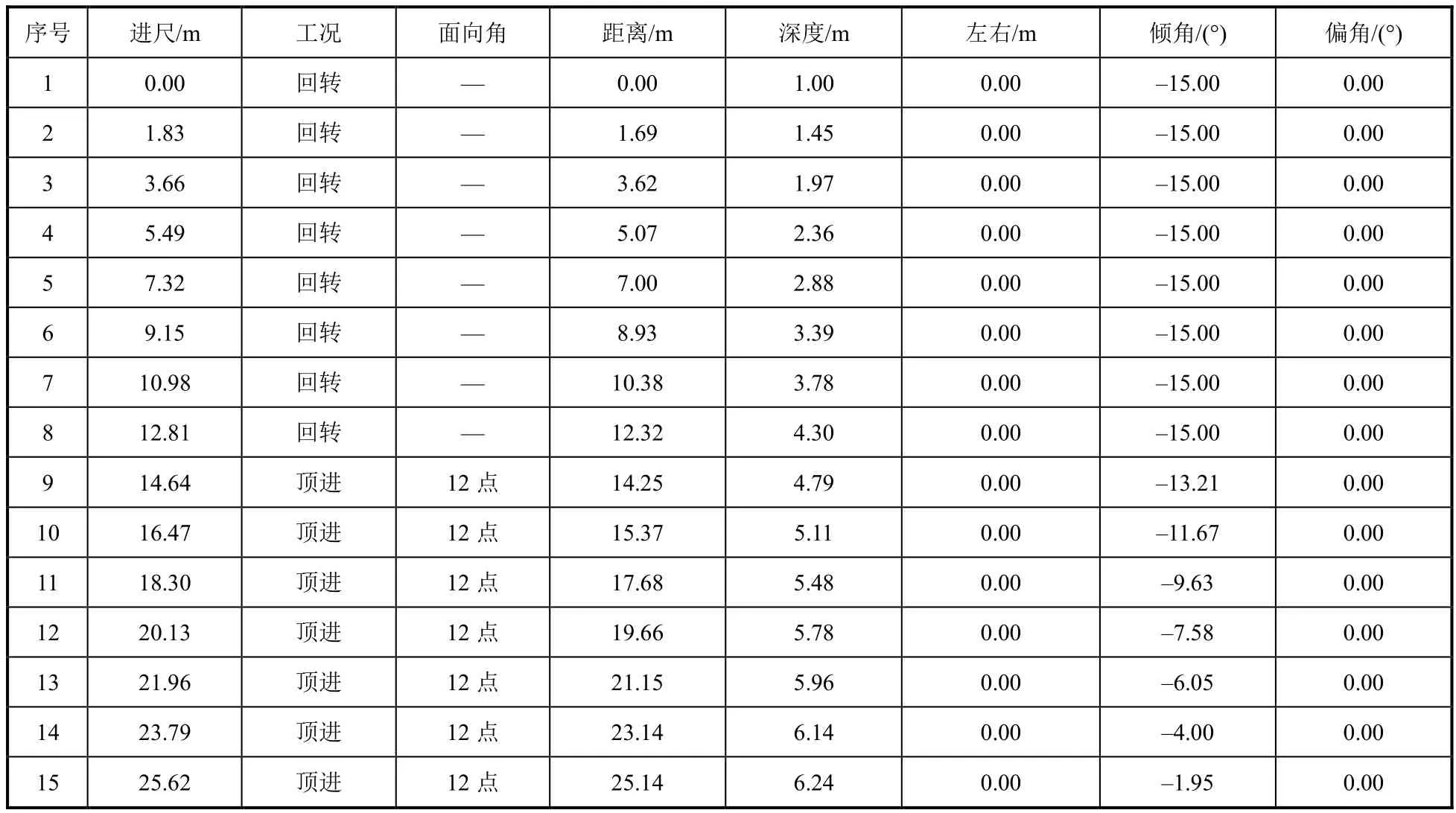
表2 轨迹计算
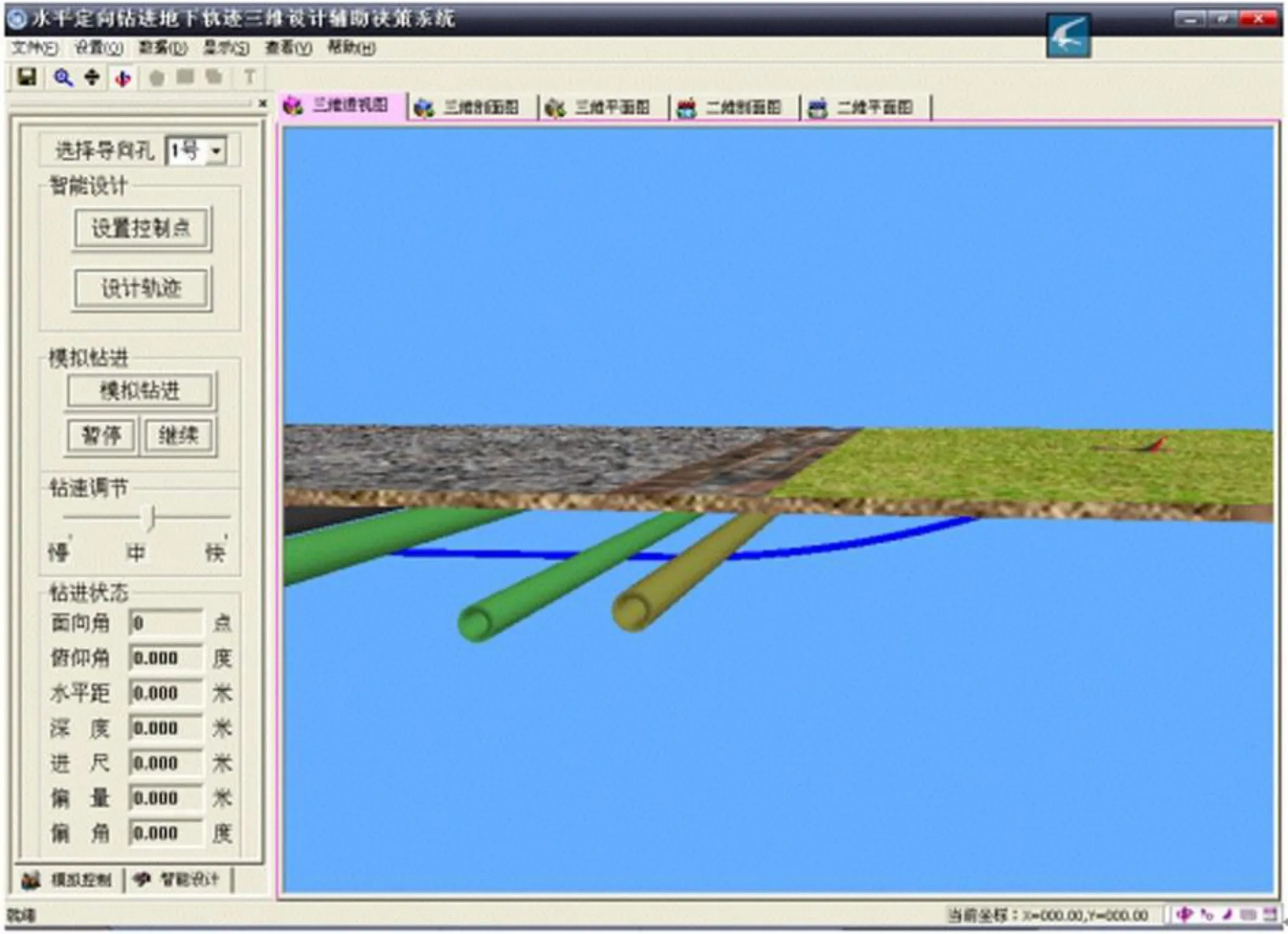
图3 轨迹模型模拟界面
3 控向纠偏及回拖
为顺利钻好导向孔,对控向系统进行选择,并对定向参数进行实时控制,以确保钻进轨迹符合设计要求[3-4]。
3.1 控向系统组成
控向系统由探测器、接口单元、计算机、打印机和钻机控制台组成。其中:探测器由定向模件(检测地磁场和重力场的传感器)、数字电路和控制电路组成;接口单元包括电源控制电路、解调电路和接口电路;计算机最小应有640 kb容量的内储存器,并有并行接口和串行接口;打印机为普通并行打印机;钻机控制台包括2个LCD显示器、驱动电路和控制电路。
3.2 控向系统工作原理
控向系统的工作原理是利用导航仪的导向作用,使导向钻头沿着设计轨迹钻进,导向钻孔的实际轨迹与设计轨迹相符。完成导向孔施工后,再实施回拉扩孔铺管,将工作管道铺设在设计位置。
具体工作过程如下:给探测器供电后,探测器中的传感器检测到地磁场和重力场信号,通过导线传到接口单元,经A/D转换、微控制电路、调制器转换为一系列信息数据,经过检波输入计算机,通过计算机控向程序处理,显示出定向信息,然后将这些参数(方位角、方位角模式、偏差、工具面)送到钻机控制台。控向人员从计算机显示的数据就可知道钻头离地面的深度、实际钻进距离、左右偏差等情况,从而根据设计要求进行下一步方向控制,并告诉司钻人员下一根钻杆走向,由司钻人员进行钻头行进方向的调整。
3.3 定向参数
(1)方位角:钻杆钻进方向的角度,即大地方位角,其范围为0°~360°。
(2)倾角:钻杆钻进方向与水平面所成的夹角,其范围为0°~90°。一般水平定向钻机入土角约为10°,设计出土角约为9°。
(3)高程:穿越段各点的海拔,为方便起见,用相对高程计算,即穿越段各点与入土点的高程差。
(4)右偏差:钻进时钻头偏离中心线的水平距离,向左偏离中心线数据为负,向右偏离中心线数据为正。
3.4 导向孔施工
导向孔施工前先用全站仪将钻孔中心线标在地面上,然后用探测器测量该中心线的方位角。由于穿越出、人土点无法通视,只能通过全站仪进行3点倒站,才将中心线方位在地面上标定出来。全站仪倒站容易产生误差,一般情况下应尽量减少全站仪的倒站次数或避免倒站。测量放线完成后就可以进行磁方位测量。
3.5 控导向系统
松安路定向钻工程中采用美国DCI公司SST®地磁导向定位系统。此导向定位系统免去了费时费力的地面DC栅格的铺设过程,为其准确快捷地完成施工作业奠定了坚实的基础。基于SST®地磁传感器特有的小尺寸形体,其旋转半径可以达到极小的数值。SST®地磁导向定位系统以度数的形式(360°)实时监测钻头的方位朝向,并将实际钻孔路径与施工设计钻孔路径间的深度和横向位置偏差信息实时显示在笔记本电脑上,以供司钻人员参考,快速进行钻进方位调整。利用Eclipse®接收器和远程显示器,不但可以看到钻头的实时位置和深度信息,还可以利用Eclipse®接收器的地面跟踪定位功能对数据进行对比确认。
松安路定向钻工程中采用美国DCI公司生产的DIGITARK定向系统。该定位仪可通过坡度、钟点数、埋深及三点一线技术,确保钻孔轨迹达到设计要的纵向偏差不大于10 m;横向偏差不大于2 m,实现了真正意义的引导式钻进,使无停顿钻进成为可能。通过从远程显示器接收的信号,经过专用野外作业笔记本电脑中的软件进行计算、分析实时作业数据。司钻人员根据电脑分析计算结果及远程显示器显示的实时数据进行调整操作。
3.6 扩孔施工
将导向孔孔径扩大至所铺设管径的1.5倍以上,以满足穿越土层及拟拖管道的要求。铺设外径φ508 mm的钢管,需要5次预扩孔、1次清孔工作,即φ450 mm、φ550 mm、φ650 mm、φ750 mm、φ850 mm扩孔及φ750 mm清孔。
在扩孔工作中,司钻手要密切注意司钻台各仪表的读数变化,充分掌握地下钻进情况,随时做好钻进参数调整;泥浆工程师观察井眼泥浆返出情况,以便准确判断钻进过程中的地质情况,来决策钻进泥浆配比及供给;泥浆工程师随时与司钻手保持联系,确保扩孔成功。
3.7 拖管
拖管过程中不停地注入泥浆,同时钢管下垫袋装膨润土,以减小回拖力防止防腐层被破坏。松安路定向钻工程中拖管一次成功,过程顺利,耗时约8 h,且拖管拉力不大于700 kN,达到了预期目的。
4 结语
在定向钻管道穿越工程中,无论管道轨迹是平面曲线还是空间曲线或是平面与空间组合的多维曲线,只要对工程进行具体详尽的分析和研究,针对不同工程情况采取可靠的技术措施进行不同的处理,定向钻穿越工程成功率将大大提高。
