基于图像轮廓检测的航天器目标跟踪控制系统设计
2021-03-04许靖添
许靖添
(北京师范大学珠海分校 设计学院,广东 珠海 519085)
0 引言
为提高航天系统的自主保护性能,降低安全风险系数,应注意其目标跟踪系统的设置,避免航天器遭遇不良袭击[1]。由于航天器目标跟踪控制系统在设计时需要大量的航天器模拟数据,为此,不少研究学者针对航天器制造中可能产生的问题进行航天器目标跟踪控制系统的设计,设法解决当前航天器存在的系统问题[2]。
当前研究集中于对航天器系统数据的检验中,对于中心系统的控制强度较高,在完善内部硬件元件的前提下能够实现软件系统辅助操作,提升了航天器的操作可控性,能够为后续实验操作提供数据基础[3]。传统基于FPGA的航天器目标跟踪控制系统设计在操作过程中不断改变自身的系统设置,并按照航天器所适应的标准原则进行系统操作数据提取,检验内控系统的基础状态,获取良好的目标跟踪控制结果[4]。
传统基于图像特征的航天器目标跟踪控制系统设计整合了所需的中心信息,时刻保证航天器系统数据的安全,具有一定的高效性[5]。但传统研究在实验时,会产生一定的操作浪费,操作步骤较为繁琐,不符合系统的简化要求,为此,根据上述问题,本文提出一种新式基于图像轮廓检测的航天器目标跟踪控制系统设计对以上问题进行分析与解决。
本文系统设计整合了系统硬件的优势功能,辅助软件调整操作,获取有关的操作数据,完善中心信息系统收集功能,获得良好的目标跟踪数据,提升了系统的操作有效性,缩减操作时间,一定程度上优化系统装置,具有更好的研究价值。
1 航天器目标跟踪控制系统硬件设计
图像轮廓检测作为较为关键的系统图像数据检测技术,在航天器目标跟踪控制系统中具有较为重要的设备检查地位,为强化对航天器目标跟踪控制系统的设计性能,本文构建了不同的数据操作模块,确保数据处于系统可调控位置,且保护系统硬件装置不受外界影响[6]。通过E5-2600 v3/v4处理器设计了数据统计器,强化了对数据的统计,并进行集中性操作管理统计,通过VGA接口及RJ45独立IPMI管理网口设计了数据传输模块,实现了数据传输及存储[7]。
数据统计器搭配E5-2600 v3/v4处理器,单处理器支持22核,双QPI链接支持9.6 GT/s,多达16个DDR4内存插槽,具有7个PCIe扩展槽位支持全高卡的设计,能够在统计数据较多的情况下实现数据实时管理与调配操作。通过不同的硬盘处理器将航天器目标跟踪控制数据传输至数据统计系统中,逐步统计出系统所需数据,并按照经典处理模式将处理的数据统一收集到硬件主盘系统中作为存储数据执行存储任务[8]。支持12个内存,每个处理器支持6个内存通道,内存速度可达 2 933 MT/s,可进行全方面的数据控制操作,并研究中心处理器的剩余空间信息,并管理系统硬件交换线结构,设置交换式总线如图1所示,保证数据的控制安全性。
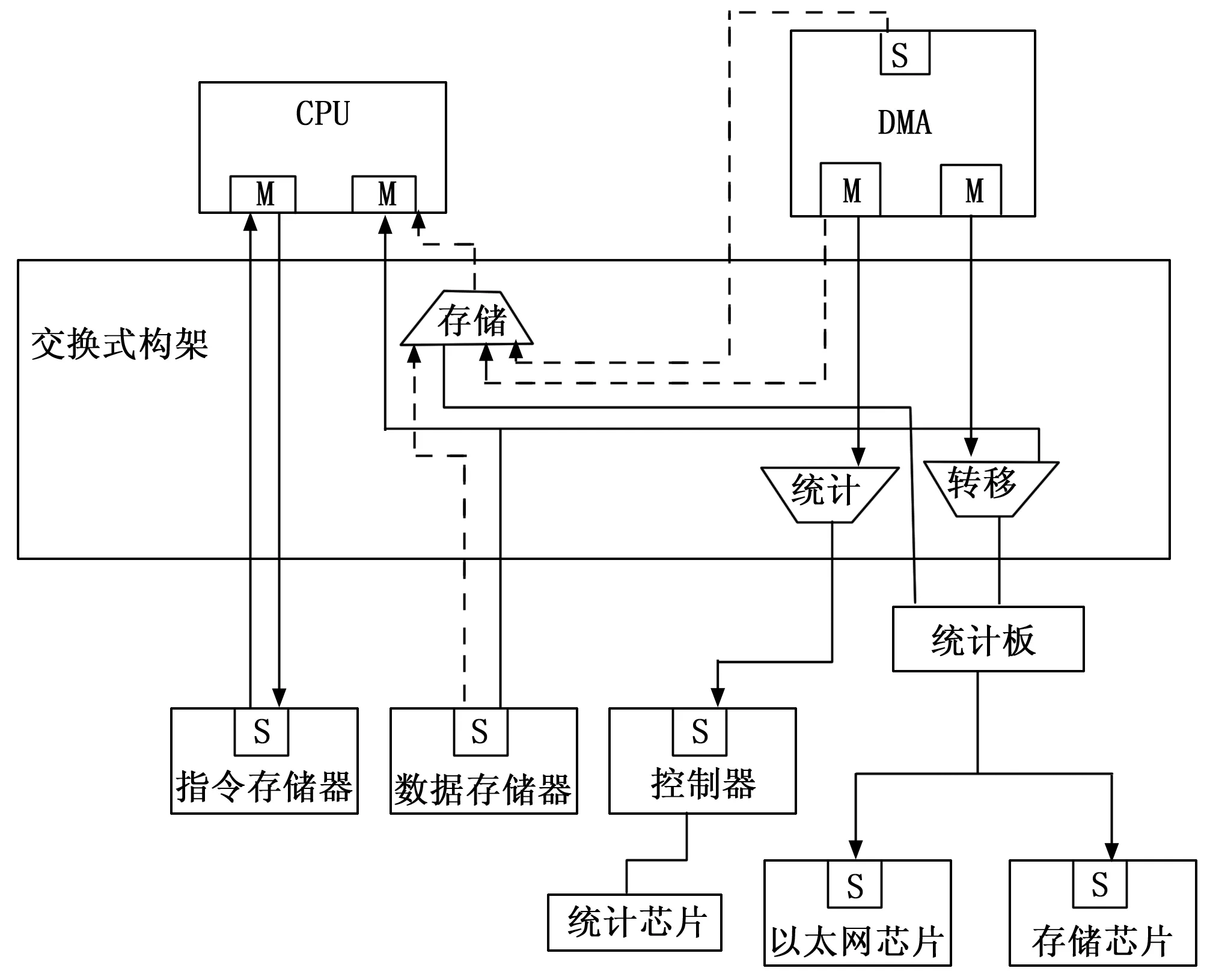
图1 交换式总线图
在完成数据统计后,将统计的数据放置至数据传输模块中,并选用相应的数据传输器处理数据传输过程,本文数据传输器具有2个前置USB 3.0接口、后置2个USB3.0接口,1个前置VGA接口、1个后置VGA接口,1个后置RJ45独立IPMI管理网口,能够在信息传输的同时进行控制管理,并不断调整接口信息状态,在信息集中后调整操作状态,将统计数据由前置接口输入,再经过流动通道传输控制信息,最后经过后置接口传出所需数据,由此实现整体航天器目标跟踪控制系统硬件设计操作[9]。
2 基于图像轮廓检测的航天器目标跟踪控制系统软件设计
在实现对系统硬件的设计后,通过图像轮廓实现航天器目标跟踪控制系统软件设计。采集航天器轮廓图像,获取轮廓信息,选取阈值作为航天器目标跟踪控制系统的操作系数,检验跟踪目标的运动方向,调控方向数据,降低图像的像素变化程度,实现航天器目标跟踪精准控制。
设置软件设计流程如图2所示。

图2 软件设计流程图
通过图2可以看出,进行了软件结构重组操作,将航天器目标跟踪控制数据全部存储至运输通道中,控制数据的流通方向,扩展流通通道,保证数据流通的通畅性,并按照航天器目标选取原则控制选取的目标范围,补充数据跟踪控制算法[10]。设置如下步骤的软件操作:
所设计的航天器目标跟踪控制系统选取不同的操作组件进行操作研究,首先控制实时图像的采集信息,由图像轮廓检测系统显示接收的图像信息,并实时处理接收的图像数据,编制系统操作编码,同时管理中心存储模块的信息状态,按照解码芯片的解码功能破解内部程序信息,防止信息系统的崩溃,采集的航天器轮廓如图3所示。选取合适的阈值,作为航天器目标跟踪控制系统的操作系数,设置阈值设定方程式如下:

(1)
由上述公式可以看出,阈值D中的坐标处于T的可允许运动范围内,根据动点F与动点B的具体位置确定阈值的精准操作范围,并由此获取相应的操作系数,执行内部航天器系统的软件程序操作任务[11]。

图3 采集的航天器轮廓图
下达目标跟踪控制查找命令,同时将命令范围缩减至区域空间内,检测动态目标控制算法,根据视频显示的航天器具体状况划分操作区域,并设定区域的标准域值基本掌握域值数据的分布条件[12]。监测数据目标,并提取目标数据,由于算法计算的过程较为庞杂,本文简化基础算法操作,将与研究数据无关的参数删除,整合剩余的参数数据,集中检验跟踪目标的运动方向,精准调控方向数据,降低图像的像素变化程度,调配绝对差数据,设置绝对差调配公式如下所示:

K(x+i-1,y+j-1)
(2)
式中,P表示为绝对差坐标系数,T表示为跟踪目标运动坐标数据,K表示为检验程度数值。按照上述调配操作,完善中心系统软件部分的处理性能,同时标准化管理航天器目标跟踪控制数据的操作实现数据,考虑目标运动的检测准则,简化数学形态处理操作,加强内部控制力度,设置数据监控装置,确保控制数据处于一定的安全状态中[13]。精准降低软件模块化管理程度,计算目标数据的运动方位角,并设置计算公式如下:
(3)
式中,a表示为目标数据的运动方位角数据,y表示为坐标系纵轴中的数据,x表示为坐标系横轴中的数据,最终得出的a角为锐角[14]。设置相关的角度方位参数如图4所示。

图4 角度方位参数图
将获取的方位角数据集中收集至软件信息库中,加大中心沟通力度,并调配系统信息管理数据,在获得相应的管理数据数值后,解锁软件程序空间信息,并释放程序因子,排除外界干扰数据,避免数据受到外来侵扰,实现整体航天器目标跟踪控制系统设计[15]。
通过采集到的航天器轮廓图,监测并提取目标数据,设置绝对差调配公式检验跟踪目标的运动方向,降低图像的像素变化程度,通过计算目标数据的运动方位角来精准调控方向数据,实现航天器目标的精准跟踪控制。
3 实验结果与分析
为检验所设计系统的目标跟踪控制性能,设计不同的实验环境,将本文基于图像轮廓检测的航天器目标跟踪控制系统与传统的基于FPGA的航天器目标跟踪控制系统系统及基于图像特征的航天器目标跟踪控制系统进行比较,同时构建操作实验背景数据集实验操作步骤如下:
实验在仿真环境Matlab软件中进行,采用国家航天局网站(http://www.cnsa.gov.cn/)中的航天器图像为实验数据。为验证系统操作板块处于可控状态中,将实验环境设置在密闭环境中,同时尽量避免实验数据与外来数据的接触,保证数据的完整程度,同时对数据的基础时序进行检验,设置相应的时序如图5所示。
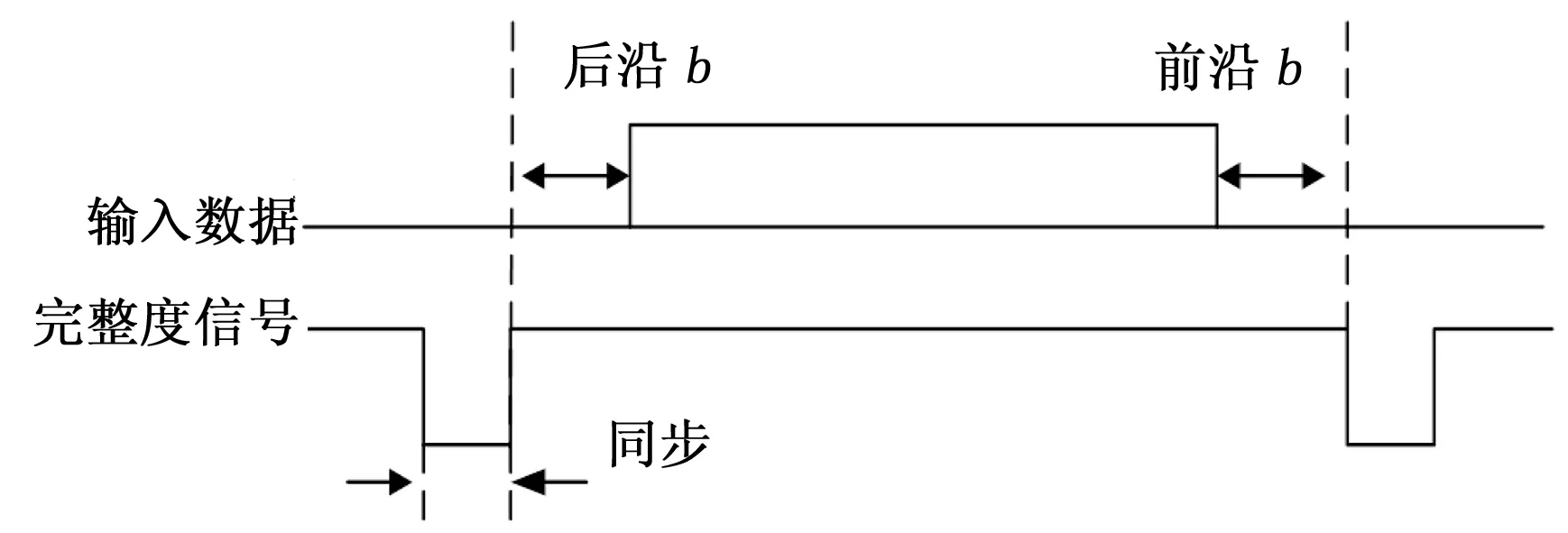
图5 时序图
管理内部调控系统,将不同的系统设计操作数据集中调进内部信息空间中,结合硬件管理手段与软件整合手段,不断加强中心区域的实验参数数量添加程度,利用逻辑分析仪分析航天器目标跟踪控制系统的存在可行性,调配保护装置位置,时刻保护数据的存储状态。在经过上述初始实验操作后,设置实验参数如表1所示。

表1 实验参数
根据表1的实验参数进行数据操作实验研究,集中图像解码数据,并整合数据信息,将需进行基础性检验的数据集中至内部调配系统空间中,同时按照系统操作的基础流程管理内部空间范围,追踪数据解码图像,在图像传输至主系统的过程中拦截错误数据,避免错误数据对实验结果的干扰,同时控制数据时序顺序,对数据时序进行图像设置,如图6所示。

图6 数据时序图
强化内部调控力度,并将调控中心转移至实验环境中心位置,主导内部系统的信息控制方向,将不同方法的系统设计操作放于同一操作通道中,进行实验对比,并设置相应的目标跟踪控制有效率对比如图7所示。
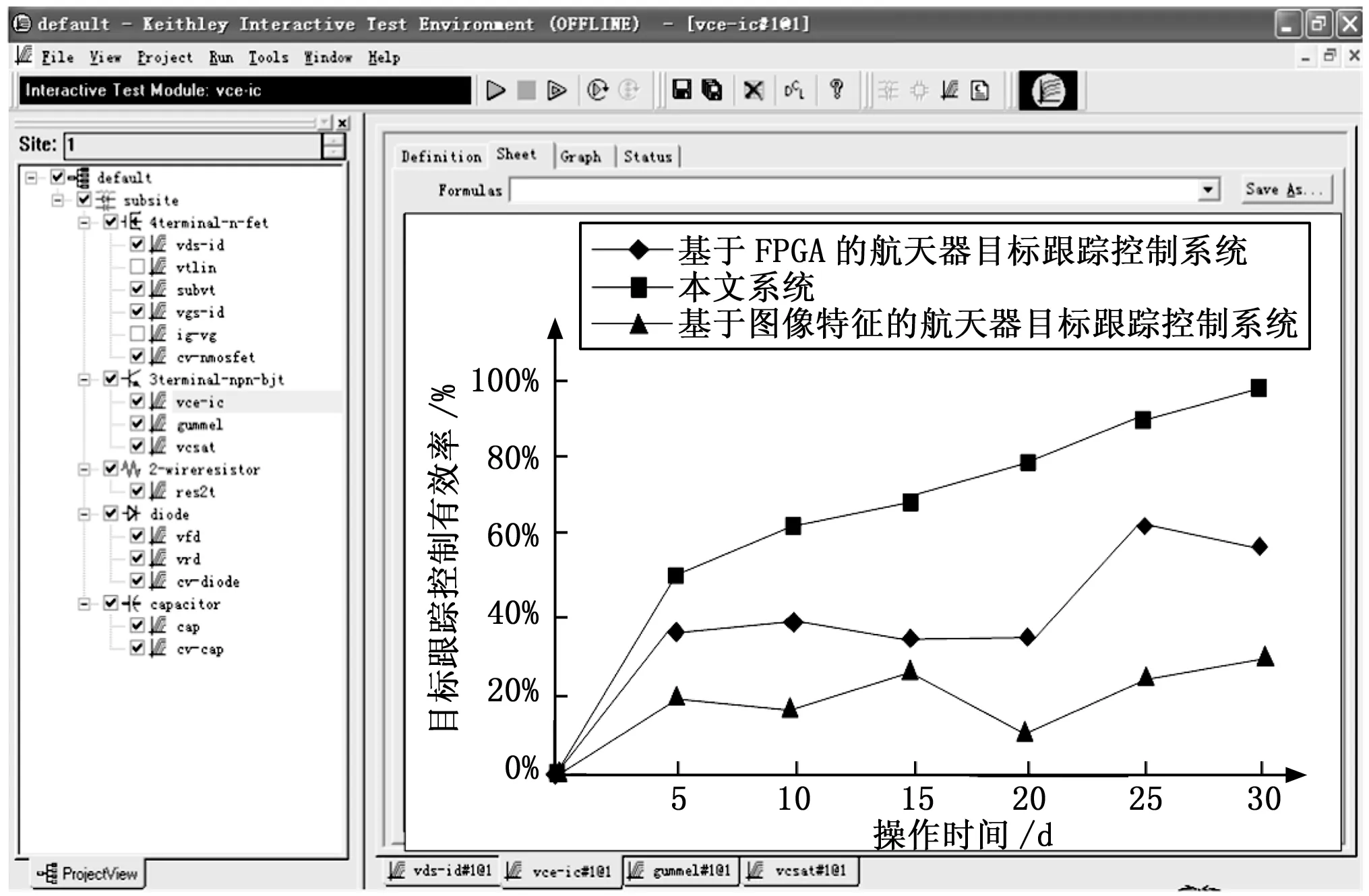
图7 目标跟踪控制有效率对比图
根据图7可以分析出,基于FPGA的航天器目标跟踪控制系统设计具有较高的目标跟踪控制有效率,平均值为53%,传统基于图像特征的航天器目标跟踪控制系统设计的目标跟踪控制有效率较低,平均值为31%,而本文基于图像轮廓检测的航天器目标跟踪控制系统设计的目标跟踪控制有效率均高于其他两种传统系统,平均值为84%。造成此种差异的原因在于本文系统在操作过程中不断转化信息数据功能,并将控制系统的重心转移至控制系统内部,合理调配相关性数据,并整合操作的内部系统数据,完善航天器信息,合理管理信息的存储空间,具有较高的跟踪控制有效率。
为更好地比较出本文系统设计的性能,设置二次实验环境进行实验操作,并管理试验数据的挤出流向,涉及如表2所示的二次试验参数表。
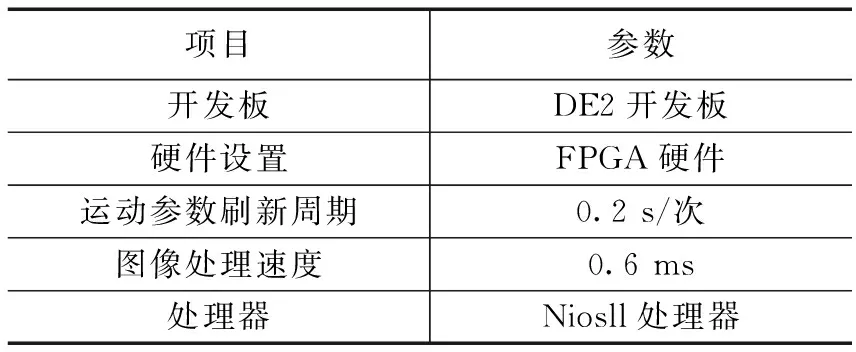
表2 实验参数
在表2中,选取相关的参数管理数据,将内部系统的设计信息统一集中到管理系统中,管理信息存储空间,将分配的航天器目标跟踪控制数据收集到信息处理系统中,并调节系统间的内部结构矛盾,保证数据处于精准处理状态中,设置状态调整如图8所示。

图8 数据状态调整图
计算航天器目标跟踪控制系统的控制系数,调配控制系数的存储区域,并将区域的范围扩大到系统操作范围中,整合控制数据,确保数据可进行自主流动操作,并加强信息中心管理操作力度,在管理的基础上进行实验研究,整合实验数据,将获得的本文系统设计的目标跟踪控制位置图像与传统系统设计的目标跟踪控制位置图像进行比较,如图9所示。

图9 目标跟踪控制位置图像对比图
对比图9可以得出,传统航天器目标跟踪控制系统的目标跟踪控制位置与理想位置差距较大,且跟踪位置的准确率较差,而本文基于图像轮廓检测的航天器目标跟踪控制系统与理想位置差距均小于其他两种传统系统设计的差距,准确率较高。由于本文在实验过程中不断扩大对控制数据的监控范围,时刻把握数据的基础位置,并调控数据信息,将所获取的信息集中统计于同一航天器目标跟踪控制系统数据库中,简便操作步骤,优化控制性能,获取较佳的目标跟踪控制位置。传统基于图像特征的航天器目标跟踪控制系统设计在管理自身系统数据的同时兼顾对航天器目标数据的监测操作,强化内部信息的整合力度,扩展控制空间,具有良好的目标跟踪控制位置。
综上所述,本文基于图像轮廓检测的航天器目标跟踪控制系统设计的设计效果较好,能够完整处理航天器目标信息,具有较强的操作性能。
4 结束语
本文在传统航天器目标跟踪控制系统设计的基础上提出了一种新式基于图像轮廓检测的航天器目标跟踪控制系统设计,实验结果表明,该系统设计效果明显优于传统系统,提高了目标跟踪控制有效率及准确率。所设计系统结合了系统硬件装置与软件程序的优势,减缓了系统内部矛盾,具有较高的系统整合性,能够在较高程度上完善系统,获得更好的操作结果数据,具有更为广阔的发展前景。
